




 广告
广告





















































C-ICAP自动驾驶测评 | 首次引入“时间差”指标测评自动驾驶系统安全性及通行效率

自动驾驶技术是未来汽车行业的重要发展方向之一,在过去几年内取得了长足进展,国内外对自动驾驶关注程度逐年提升,但目前自动驾驶产品尚不成熟,处于测试或者示范运营阶段,相关测试评价体系也并不健全。
对于自动驾驶汽车,大多数人都会在意它的可靠性、安全性、舒适性等因素,现阶段确保自动驾驶汽车上路的安全应该是最为重要的。业界迫切需要一个可以合理评价自动驾驶系统安全性的指标体系。
中汽中心紧跟行业发展趋势,自2018年开始,对自动驾驶车辆的测试评价开展研究,先后在天津市、济南市、盐城市,完成了10余款车型的摸底验证,并从实际用车角度,提出了自动驾驶测试评价体系,在行业技术委员会(天津检验中心、华为等)的大力支持下,于2023年11月发布了《C-ICAP高快路自动驾驶系统测评规则(征求意见稿)》,在安全性指标上,提出了时间差(TD)作为评价指标,相比于“是否避免碰撞、碰撞时减速度大小、碰撞预警时间(TTC)、跟车时距(THW)”等指标,更好地适用于自动驾驶车辆。
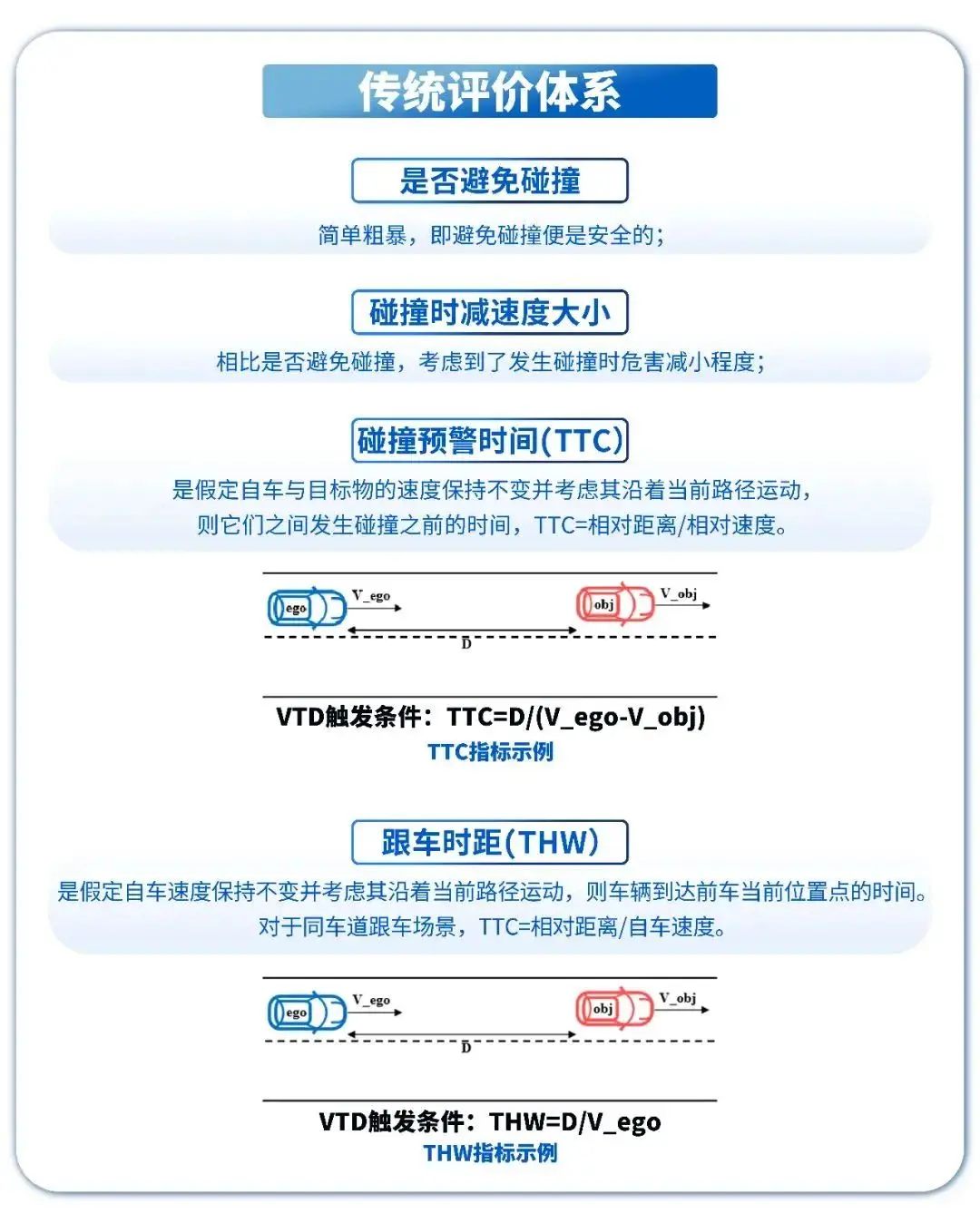
上述传统评价体系具备一定的局限性,或者评价方式简单粗暴,或者不能涵盖其他类型的碰撞(如侧面碰撞或倒车碰撞),或者不能充分考虑自动驾驶车辆的决策能力。
因此,中汽中心连同行业技术专家,提出了时间差(TD,Time Difference)的指标,用于衡量自动驾驶车辆的驾驶策略是否足够安全。
时间差(TD,Time Difference)定义
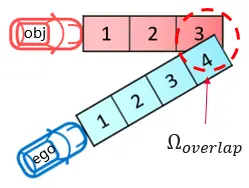
根据自车与目标车仿真或实车测试完成后的事后轨迹,计算两条轨迹在空间重叠区域处的时间差。自动驾驶车辆需要保证上述时间差的值在合理范围内,以避免跟车距离过近而导致的碰撞风险或跟车距离过远而导致的效率低下。
跟车场景下TTC、TD指标对比
时间差(TD,Time Difference)计算方法
TD = t1 − t2 ,f1(t1) = ω, f2(t2) = ω, ω∈Ωoverlap, 其中f1和f2分别为自车与目标车的轨迹函数,轨迹函数映射关系为时间(t)到空间位置(ω),且 Ωoverlap 是自车与目标车轨迹的空间重叠区域。以上述场景为例,ω即为图中Ωoverlap处,ω处t1与t2分别为4s和3s,则该场景下TD = t1 − t2= 4 – 3 = 1s。
TTC、TD指标对比
相比于碰撞预警时间(TTC),时间差(TD)可以适用于更多的场景类型,比如相同速度下近距离跟车/切入,及路口等场景等;
示例:跟车场景
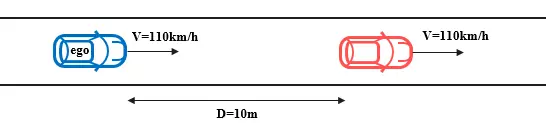
在下述跟车场景下,两车速度均为110km/h,相对距离为10m
跟车场景下TTC、TD指标对比
根据碰撞预警时间(TTC)进行计算,发现TTC无穷大,所以该场景是安全的。
根据时间差(TD)进行计算,TD=0.33s,所以该场景是危险的。
假设在上述场景下,前车突然急刹,自车在反应时间不足1s,故此场景下的跟车距离是危险的,所以根据时间差的(TD)的评价方法更为合理。
THW、TD指标对比
相比于跟车时距(THW),时间差(TD)充分考虑了自动驾驶汽车在危险发生后,会做出正确的处置措施从而保证安全等问题。
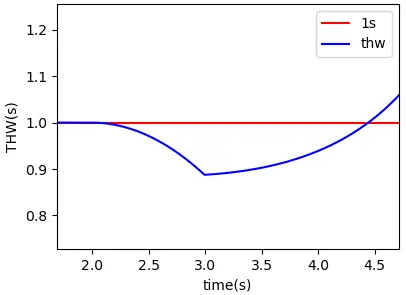
示例:前车制动场景
在下述跟车场景下,自车跟随前车,以1s的时距行驶,且两车速度均为80km/h,稳定行驶2s后,前车以5m/s2的减速度制动,自车反应时间为1s,1s后以6m/s2的减速度制动。
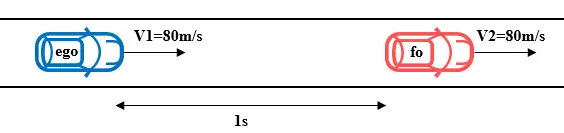
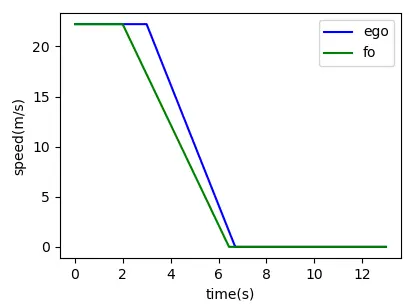
根据跟车时距(THW)进行评价:假设跟车时距1s是安全的,那么在前车制动后,两车距离减小,由于在反应时间内,自车速度不变,必然会导致THW不再满足安全条件。然而实际上自车在反应时间后如果做出了合理的安全处置措施,也是能满足安全条件的。THW假设自车之后均已当前时刻速度行驶是不够合理的。
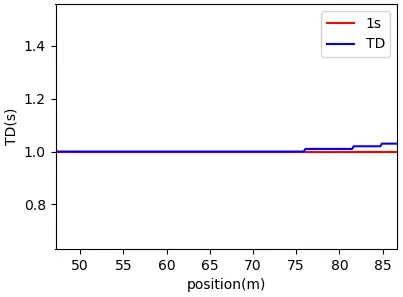
根据根据时间差(TD)进行评价:假设跟车时间差1s是安全的,前车制动,自车在反应时间后如果做出了合理的安全处置措施,使得经过每个相同位置点处的时间差均不小于1s,满足安全条件。TD考虑了自车遇到危险状况时事后做出的安全响应,而不是单纯假设自车遇到危险时依然速度不变,更加合理的评估自车的安全性。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
