




 广告
广告





















































关于汽车底盘电控系统集成控制策略

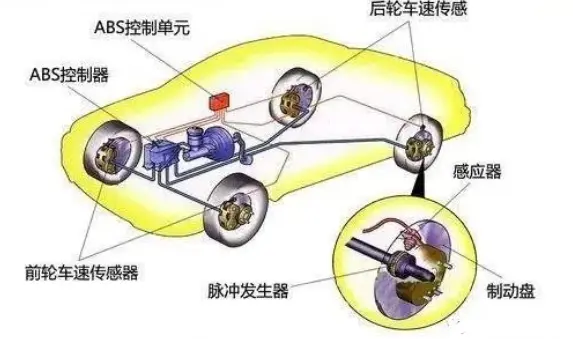
汽车底盘集成很多电控系统,包括ABS系统、ESP系统与ASS系统,如何对这些子系统进行集成控制,避免 不同子系统运行过程中产生相互干扰和影响,需研究并提出一套合理可行的集成控制策略。
1、子系统冲突
1.1 动作耦合与影响
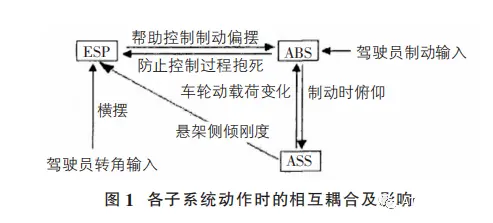
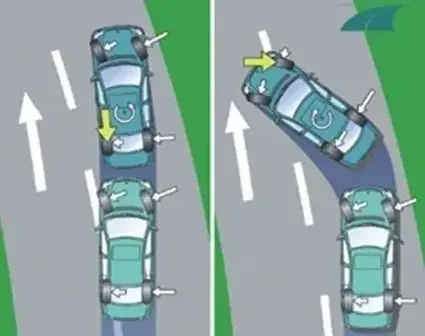
汽车行驶时,ASS 系统始终处在工作状态,通过悬架 调节使车辆保持平顺;若驾驶员为转向盘作出一定转角, 则ESP系统自动调节转向力,使车辆开始曲线行驶,使车辆横摆,系统检测到衡摆值后,对横摆动作予以控制ASS 系统的主要作用在于改变侧倾刚度,进而影响到质心侧偏角及横摆角速度。此时如果前方存在障碍需要立即制动,则 ABS 系统开始动作,控制车辆的制动。
在ABS系统启动后,会使车辆产生一定俯仰,对前后悬架系统的悬架力分配造成影响,进而影响到悬架系统振动状态,使悬架系统的振动加速度及挠度都发生变化。而ASS系统动作后,由于对悬架系统的振动加速度与动挠度进行调节会使车轮产生上下跳动,所以会使车辆接地性能发生变化, 进而引起车辆动载荷改变。对于车辆动载荷,它是对制动力起决定作用的因素。
ABS系统主要功能为对滑移率进行调节,最大限度利用制动力,避免车轮抱死。ABS 系统启动后,由于不同车轮制动力矩存在差别,所以可能会使 车辆出现附加横摆,此时 ESP系统通过控制质心侧偏角与横摆力矩为制动横摆的控制提供辅助,使车辆处在稳定状态。ESP系统动作时,可能会使车轮发生抱死,但 ABS 系统的介入却能避免车轮抱死。各子系统动作时的相互耦合及影响见图 1。
1.2 控制执行器干涉
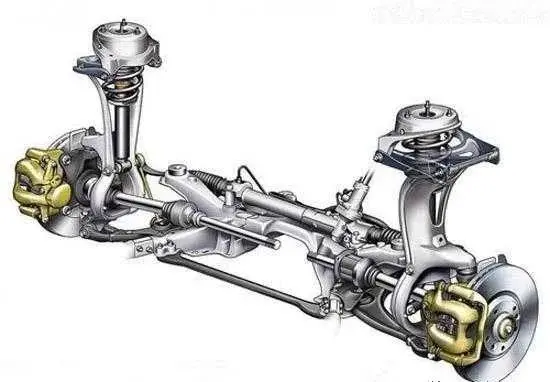
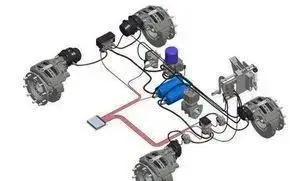
ASS系统通过对簧载和非簧载质量之间存在的做动力调节使车辆保持平顺。ABS系统通过对制动力调节系统 完成制动力矩的增加、保持或减小,对制动器的动作进行控制,避免车轮抱死。ESP系统以制动器为主要执行机构,通过对制动力的适当调节使车轮适当制动,进而实现对横摆力矩及质心侧偏角的有效控制,避免车辆失控。
汽车的ABS系统与ESP系统都以制动器为主要执行机构,但这两个子系统的输入信息及控制目标要求完全不同,这就会使这两个子系统存在一定矛盾。如果矛盾出现,将在接线情况下导致车辆性能失控,严重时将由于子系统相互影响,导致车辆失稳,产生交通事故。
1.3 系统冗余分析
如果各子系统之间只是单纯的组合运用,分别独立控 制,则ABS系统与ESP系统都要读取车速信号,而ABS系统与ESP系统都要通过自身制动控制系统为制动器传输制动信号,这样就会引起传感器与线束冗余。

2 集成控制策略
2.1 集成控制结构
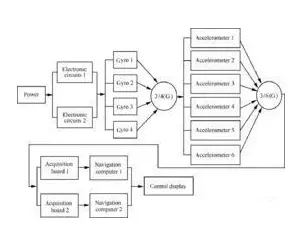
根据分布式集成控制相关理论,建立不同子系统之间 的协调机制,通过协调减小不同子系统相互影响,避免冲突和矛盾的发生,进而保证车辆行驶性能对集成控制而言,是核心所在。本次提出如图 2 所示的集成控制结构。
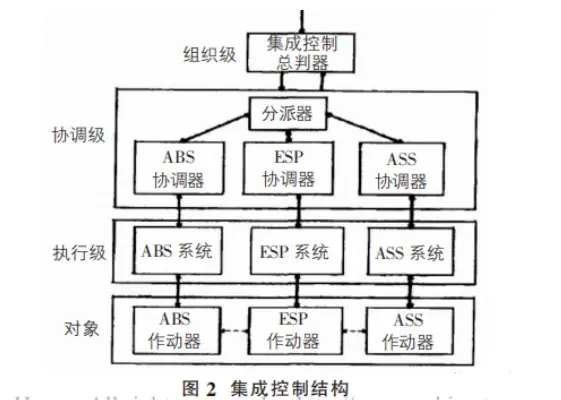
从图2可以看出,对象层级由ESP系统、ASS系统和 ABS系统的作动器组成,与各子系统的执行机构相对应;执行层级由ESP系统、ASS系统和 ABS 系统的电控系统组成,与各子系统的独立控制策略相对应;协调级用于信息传递,为总判器提供各子系统实际控制状态,总判器根据报告的各子系统状态完成裁决之后,通过分派器分派至不同子系统的协调器,最终通过协调器使各子系统分别执行经裁决以后的控制,以此重复循环。
2.2 总判器的判决机制
建立判决机制的主要目的为对各子系统之间的冲突和矛盾进行调节,确保汽车行驶性能始终处在最佳。在汽车正常行驶过程中,ASS系统单独动作,使车辆保持平顺,此时需确保该子系统调控参数都处于理想值的附近,包括悬架系统动挠度与垂向加速度。
在汽车直线制动过程中,ABS系统与ASS系统一同动作,保证车辆安全,要在避免车轮抱死的同时,确保滑移率处于最优值的附近,为尽可能减小ABS系统启动后导致的车身俯仰,以免对前后悬架系统的悬架力分配造成太大影响,还需要对俯仰角进行控制,使其达到最小。
另外,为避免由于车轮的动荷载降低使地面制动力减小, 还要对动位移进行控制,使其处在允许的范围内,使车辆 良好接地。在汽车转弯行驶过程中,ESP 系统与ASS系统一同动作,确保车辆处在稳定状态。此时要使横摆角速度与质心侧偏角均处于理想范围之内。
为了使车辆转弯行驶过程中不会由于 ESP 系统控制使车轮被抱死,ABS 系统也应介入调控。为避免车轮上下跳动导致 ABS系统动作受到影响,需要对动位移进行控制,使其处在允许范围之内,保证车辆有良好接地性。
在汽车转弯制动过程中,ESP系统、ASS系统和ABS 系统一同动作,保证车辆行驶安全与稳定。首先要确保横摆角速度与质心侧偏角都处在允许范围之内,其次则要防止车轮抱死,使滑移率处于最优值的附近。另外,还要减小ABS系统启动后导致的车身俯仰及动位移,因此还要对俯仰角及动位移进行控制。
根据以上目标,将判决规则确定如下:
①当汽车转向盘的转角为0,且制动踏板力也为0时,汽车正常行驶,ASS系统动作,ESP系统与ABS系统不动作,将悬架系统的动挠度及振动加速度控制作为主要目标。
②当汽车转向盘的转角为0,但制动踏板力不为0时,汽车处在直线制动的状态,ABS系统与ASS系统动作,ESP系统不动作,此时要有控制器对俯仰角及动位移产生的变化进行监控,将滑移率的控制作为主要目标,并确保俯仰角与动位置均处在允许范围之内。
③当汽车转向盘的转角不为0,但制动踏板力为0时,汽车处在转弯的状态,ESP系统与ASS系统动作,ABS系统不动作,将质心侧偏角与横摆角速度控制作为主要目标,并应防止车轮抱死,使动位移处于允许范围之内。
④当汽车转向盘的转角不为0,且制动踏板力也不为0时,汽车处在转弯+制动的状态,ESP系统、ASS系统与ABS系统均动作,需将滑移率、横摆角速度与质心侧偏角三者的控制作为主要目标,并确保俯仰角与动位移均处于允许的范围之内。
2.3优先级设置
为避免ABS系统和ESP系统一同动作时导致执行器干涉,遵循安全性大于一切的基本原则,将系统的优先级确定为:优先防止车轮被抱死,然后对质心侧偏角与横摆角速度进行控制。
2.4冗余降解
为防止系统冗余,可采用CAN总线实现通讯,车辆的各类实时信息都通过传感器传输至CAN,然后各控制系统都在CAN中获得控制参数,同时将控制指令传输至 CAN,最后通过CAN为机械执行机构发送控制指令。
3 俯仰角与动位移的控制
如果车辆产生俯仰,则可通过对前后悬架系统垂向力的调节来控制,同样,动位移也可以通过对悬架系统垂向力的调节来控制。控制俯仰时,如果车身处于俯的状态,则悬架系统的作动力会由于受到路面激励因素持续相应而产生正负变化,此时应使左前与右前方悬架系统向上的作动力增大,向下的作动力则减小;左后与右后方悬架系统向上的作动力减小,向下的作动力则增大。
如果车身处于仰的状态,此时应使左前与右前方悬架系统向上的作动力减小,向下的作动力则增大;左后与右后方悬架系统向上的作动力增大,向下的作动力则减小。增大或减小的比例需要根据俯仰程度确定。
控制动位移时,为避免车辆产生太大的跳动,当动位移处于允许范围内时,ASS系统的悬架作动力保持不变;
而如果动位移增大,则要以动位移的方向为依据,若正向偏大,应使悬架系统向下的作动力增大,向上的作动力应减小;
若负向偏大,应使悬架系统向下的作动力减小,向上的作动力应增大。同样,增大或减小的比例需要根据动位移偏离程度确定。

4 结束语
综上所述,根据不同子系统动作时存在的耦合及影响,理清不同子系统之间存在矛盾的影响因素,然后结合分布式集成控制相关理论,建立一个完善的集成控制结构。并以此为基础明确集成控制的总判规则,同时按照具体的控制要求,提出最终的集成控制策略。
- 下一篇:主动进气格栅对整车采暖性能影响研究
- 上一篇:车载测试与传统软件测试的区别



编辑推荐




最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
