




 广告
广告





















































汽车底盘正式进入AI时代


2021年初ET7发布,当时一起发布的还有一项名为4D智能车身控制的系统,这个系统就是今天4D舒适领航功能的原型。
早在几年前,蔚来就开始规划AI底盘技术,随着Banyan·榕 2.4.0智能系统在1月26日推送更新,汽车底盘正式进入AI时代。
本期Tech Talk,我们邀请到了蔚来整车应用软件负责人肖柏宏,让肖博为我们解密蔚来AI智能底盘技术,以及4D舒适领航功能的开发故事。

在2021年初的NIO Day上,蔚来对外发布了二代平台的首款新车——智能电动旗舰轿车ET7。
ET7是一款具有划时代意义的车型,在智能驾驶硬件搭建上非常具有前瞻性,Aquila超感系统拥有33个感知硬件,超远距高精度激光雷达就包含在其中;Adam超算平台拥有四颗Orin芯片,其中两颗用于智能驾驶,一颗用于群体智能,一颗用作冗余备份。
此外,还有可持续迭代生长的Banyan·榕智能系统,赋予了蔚来智能座舱持续生长的能力。
随着ET7发布,包括上述硬件,以及由ICC智能底盘域控制器、空气弹簧+CDC动态阻尼控制系统组合而成的新一代智能底盘硬件系统,都成为了今天AI智能底盘系统和4D舒适领航功能的硬件基础。
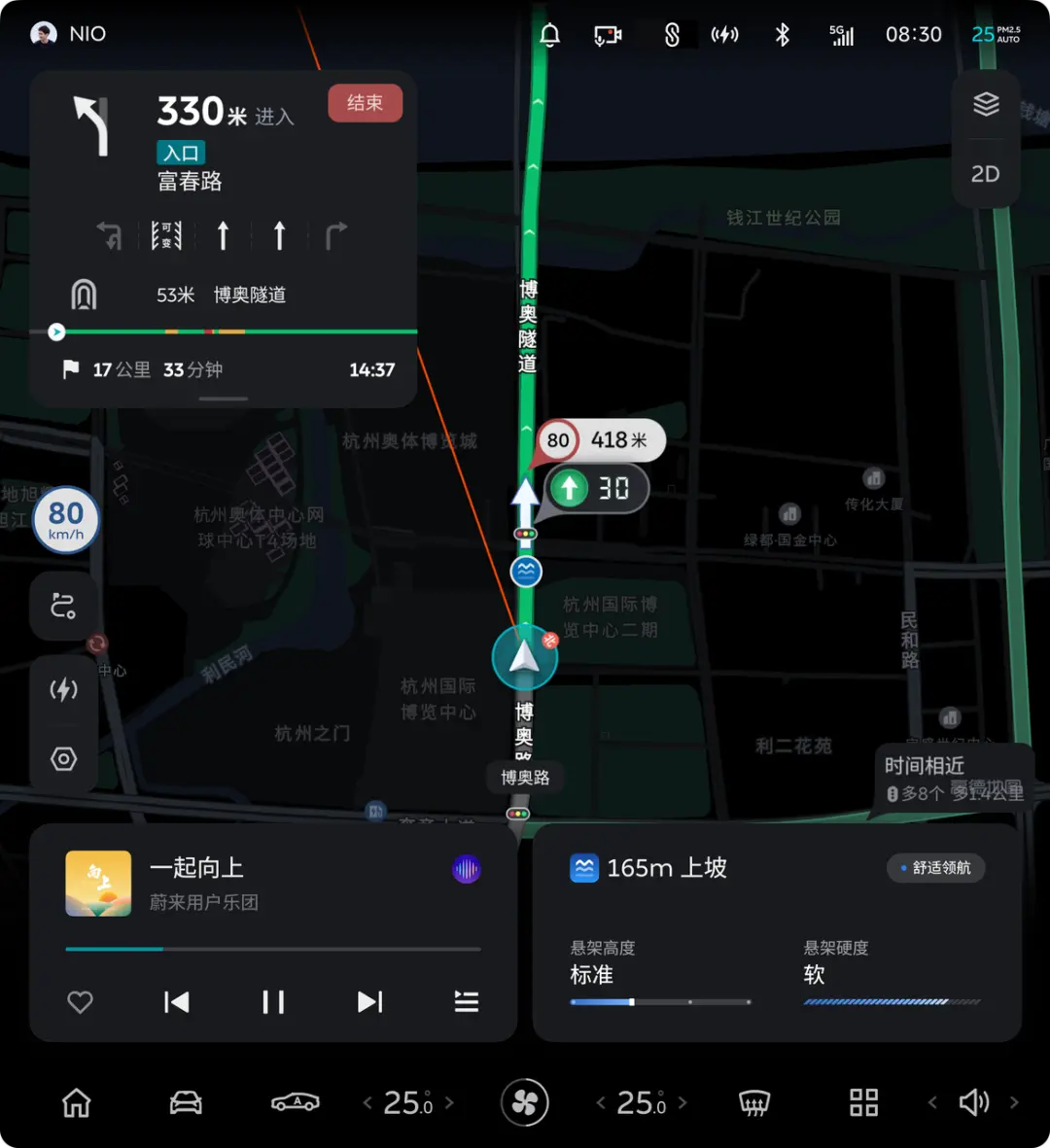
1月26日晚,4D舒适领航功能随Banyan·榕 2.4.0版本推送更新,这是全行业首次实现AI科技加持智能底盘系统。

目前,可以使用4D舒适领航的车型包括全新ES8、ET7、ES7和EC7,主要针对空悬车型进行推送。
蔚来如何做到首创AI智能底盘?
纵观整个汽车行业的发展历程,工程师们为了提升车辆的行驶舒适性,从未停止对底盘悬架系统进行改进和技术升级。如果按照电子技术的发展趋势来看,悬架技术的发展大致可分为三个阶段:
-
在电子技术刚开始普及时,底盘的动态品质主要靠提升机械性能来实现,比如50-60年代的轿车开始使用空气弹簧,但那时候空簧无法主动调节,更多是保持车身平稳,化解路面激励,所以这个时期是底盘技术电子化的初级阶段;
-
从70-80年代开始,电子技术的快速发展开启了底盘技术的半智能/“单机”智能时代;到千禧年之后,以BBA的智能空悬为代表,发展到可以通过摄像头扫描识别路况,并主动调整弹簧刚度、减振器阻尼,提升舒适性、平稳性,这一时期是底盘全面电子化进程中的全盛阶段;
-
随着汽车行业的电动化转型,伴随而来的是新一轮技术潮流,蔚来作为技术创新“引领者”,通过对车辆感知系统、传感器系统,以及云端数据进行融合,可提前获取前方道路起伏、颠簸,并前馈调节悬架参数,提升驾乘舒适性和安全性,这意味着汽车底盘正式进入到了AI智能时代。
目前在全球范围内,蔚来是首家在智能底盘上使用4D舒适领航+自适应悬架预测控制方案的智能电动汽车企业,可以说行业意义重大。
所谓4D,即车身物理层面的横、竖、纵三轴以及时间维度,那4D信息是如何建立的呢?
通过遍布车身的众多动力学传感器——悬架高度传感器、加速度传感器、轮速传感器,衍生出俯仰滚转角度、横纵向加速度等信号,同时借助外部的摄像头、Lidar等传感器,通过算法端融合这些信号,来准确估计(距离)和预测路面上的颠簸(升程)情况,并送往云端进行融合推理,形成颠簸舒适度图层。
另外,再通过识别算法+云端联网的方式,蔚来创造性地将车辆行驶过路面的反馈定义为事件,通过识别和融合事件来构建道路事件图层,不断累积的图层也会成为后续车辆用来进行悬架主动调节的主要依据。

多讲两句,目前单车构建4D舒适领航的导航图层,需要在同一地点,经过四次,才能生成。四次怎么理解?
我们的初衷在于通过多次确认来持续维护颠簸图层的数据准确性,并且4次“打点”的逻辑并不是同一辆车在同一个路段经过四次,而是某一个路段,有四辆蔚来车型(空簧+CDC)经过,就可以对颠簸图层进行确认,从而达到实时更新的效果。
还有一点,由于我们的颠簸图层建立在导航地图的基础上,现阶段需要使用导航,才能实现4D舒适领航功能。后续我们会继续推出功能优化和升级,针对用户常开路段,不开导航也能启用4D舒适领航功能。
可能有朋友好奇会说,一个4D舒适领航功能上线,怎么就开启一个底盘AI智能时代了?
如果将底盘技术的自我迭代、群体智能、更大范围的感知能力作为AI智能底盘的代表性功能,那可以这么说,蔚来的确已经开启了一个全新的时代。这不仅涉及到一个企业的技术储备,包括产业链布局、组织架构布局都要足够强大,才足以支撑一个品牌去做出体系化的创新。
就像是有一位专家,在给用户实时分析路况,动态调节底盘,时刻保持最舒适的驾乘体验。
而4D舒适领航这个功能的核心价值,就在于我们可以通过AI感知前方路况,像人一样思考,帮助用户把悬架提前调整到最适合当前路况的对应参数状态。
AI智能底盘:想法和算法都是核心
接下来讲点硬核的知识。
4D舒适领航功能的数据融合模块,可以实现多重聚合算法和评估颠簸事件算法的融合,每天采集并处理数千万条道路颠簸事件信息,每条颠簸事件信息又包含数千条车机传感器信息。
每天处理超过数百亿数据量,通过实时和离线大数据分析,最终将颠簸事件聚合结果存储于蔚来私有云上,并下放给终端用户。
利用距离和颠簸事件的类型及特征,4D舒适领航功能可以提前准备空簧高度、主动调整CDC阻尼控制策略等,实现更为精准的底盘悬架调校和最优的行驶舒适性。
这种数据融合的方式创造出了一种多重聚合算法和评估颠簸事件的算法,即:通过空间聚类方法为目标颠簸事件推理类别标签,根据标签聚合事件,为事件颠簸评估活跃指数,建立数据生成与消解的迭代算法,持续提高颠簸事件的置信度。

这套算法支持全自动数据上传、处理,无需人为介入,能够大幅降低数据运维成本。
事实上,4D舒适领航功能也是群体智能的体现,这个核心利益点可以分为两部分:
第一部分,就是我们怎么样把所有的车辆数据收集上来,然后通过AI识别把需要的数据反馈到地图上,从而将路面反馈数据与车载地图进行融合,这是一个从数据层面构图的过程;
第二部分,就是我们如何根据所生成的图层去做好车辆的底盘控制,让每一台车根据图层上的颠簸信息去做出对悬架控制的前馈准备。
在日常驾驶过程中,云端会实时下发车辆前方道路颠簸数据,依照路面颠簸类型,求解车身加速度、位移、速率的最优控制参数,并相应地调节空簧高度和高度、阻尼系数,储备悬架拉伸/压缩行程,提升高度降低行程末端冲击,化解路面激励,让用户的驾乘舒适感有着大幅的、明显的提升。
以上就是4D舒适领航功能两条最关键的链路。
最后,再给大家透露一点开发阶段的秘辛。其实在最开始的时候,我们曾试图通过用激光雷达和摄像头去实现路面感知,但在实际操作中受限于光线、天气等因素,这个方案的识别清晰度达不到设计需求,这也促使我们需要去做出技术层面的突破和迭代——除了感知硬件信息,还纳入了底盘传感器信息。
最终,经过了几年的深入研发,我们做出了一套传感器融合算法,结合车载传感器、群体智能、云端大数据等一整套完整的AI智能底盘体系,完美实现了这次Banyan 2.4.0发布的4D舒适领航功能,并在2024年初宣告汽车底盘正式进入了AI智能时代。



编辑推荐




最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
