




 广告
广告





















































汽车主动悬架技术的研究现状

汽车的平顺性主要与车辆悬架系统的设计相关。悬架系统的设计往往有3个目标:减小车身垂直加速度、悬架动变形及轮胎动载荷。传统的被动悬架系统难以同时满足汽车平顺性和操纵稳定性的需求,对于这一点主动悬架系统却能满足。Hrovat通过大量仿真分析计算发现:与被动悬架系统相比,在保证同样的车轮跳动量的情况下,主动悬架系统对簧上质量的平顺性改善在20%以内,驾驶员或许不容易察觉这种改善。
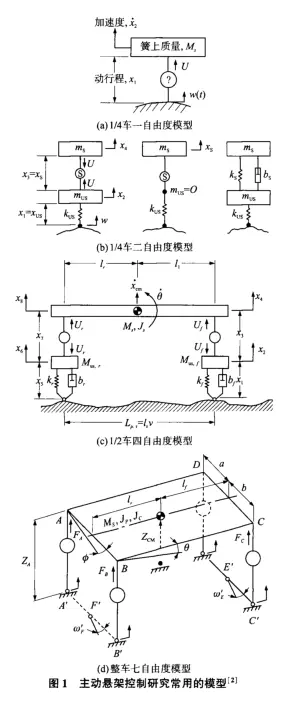
主动悬架的最大优点则在于能自动适应于不同的道路、不同车速的情况。譬如当车辆直线行驶在不平路面上,在无侧向风扰动时,便可适当增加车轮跳动量,来换取大幅度地改善车辆的平顺性;当车辆行驶在弯道上时,则可以选取不同的反馈增益来保证较好的操纵稳定性。与被动悬架系统相比,簧下质量的减少对车辆主动悬架系统的平顺性和操纵稳定性的改善更大。对主动悬架系统的建模研究最初是从一自由度1/4车模型开始的。对主动悬架中采用最优控制方法的研究作了详尽的回顾与分析,对路面模型的研究进展及主动悬架不同简化模型结合最优控制的应用情况作了细致的分析。对于主动或半主动悬架系统的设计而言,往往都需要构建相应的简化模型,如1/4车模型,1/2车模型或整车模型,如图1所示。
在主动悬架技术的研究中,大多数忽略了轮胎的垂向阻尼特性.尽管轮胎垂向阻尼相对轮胎垂直刚度来说很小,但是用来改善车辆极限潜力时还是具有一定的意义。少部分研究者对上述问题进行了研究.如Levitt等就研究了轮胎阻尼对主动悬架系统的影响.指出非零的轮胎阻尼特性将簧上质量和簧下质量在所有的频率范围内都关联起来,并通过主动控制力降低车轮频率处的簧上质量垂直加速度。
轮胎阻尼对于评价簧上质量的影响很大,在车辆直线行驶过程中,将轮胎的阻尼设为o.02,可使簧上质量的垂直加速度均方根值降低约30%。Turkay等也对此现象进行了解释,指出当考虑轮胎阻尼时,传统的传递函数的局限性不复存在。Karnopp同样也针对此问题进行了详细的分析,同时指出尽管简单的1/4线性悬架模型存在较强的局限性,但是对于设计出新的性能更优的悬架系统依然存在着巨大的潜力。
影响汽车平顺性的因素除悬架系统外.还有发动机悬置系统和座椅,而悬架系统除了能改善车辆的平顺性外,还能够提高车辆的抗侧翻稳定性[7—3|。主动悬架系统由于能够兼顾汽车的平顺性和操纵稳定性,因此一直以来都是研究的热点。主动悬架控制算法和作动器的性能更是决定悬架系统性能优劣的关键因素。
车主动悬架控制算法的研究现状
1.1最优控制
最优控制理论在车辆动力学研究领域得到了广泛的应用.它是应用极大值原理和动态规划等最优原理,求解一类带有约束条件的泛函极值问题。首先,最优控制的一个基本要求就是要建立车辆系统的精确数学模型.而参数的不确定性以及执行器的时滞等因素可能导致某些工况下控制系统的性能较被动系统还差.甚至出现失稳形成混沌状态等情况。其次,目标函数权重矩阵的取值反映了不同控制性能指标之间的重视程度,合理地选择权重系数也变得至关重要。在汽车悬架系统中获得应用的有线性最优控制和最优预瞄控制等。
最优控制在主动悬架中的应用情况如下:Hrovat针对1/4车悬架一自由度模型、1/4车悬架二自由度模型、1/2车悬架四自由度模型及整车悬架七自由度模型.分别结合最优控制方法进行了详细的分析和回顾.表明了最优控制理论对主动悬架的发展起到了重要的推动作用.而Louam等和Langlois等。则采用最优预瞄控制对悬架系统的性能进行了进一步的提升。
1.2鲁棒控制
鲁棒控制和/1综合分析可看作是最优控制发展的延伸。鲁棒控制系统的设计不仅仅是针对某一单个控制对象模型,而且是面向某一个集合的控制对象模型来进行设计的,所开发出的控制器对属于这个集合的所有控制对象均应保证稳定性和预定的性能指标。因此鲁棒控制理论首先要研究的是不确定系统的描述问题。不确定性亦可分为非结构不确定性和结构不确定性两大类。鲁棒控制系统设计的基本思想是找到不确定性变化的范围,并在这个范围内进行最坏情况下的系统设计。对于实际控制系统的设计,确定受控系统中模型不确定性和外界扰动不确定性的变化范围也是一个非常重要的问题。针对主动悬架系统中模型不确定因素.采用结构奇异值u综合分析方法对LQG控制的悬架系统进行了鲁棒稳定性的分析研究,分析发现,结构奇异值控制器能保证不确定主动悬架系统的稳定性.而最大奇异值控制则不能保证其稳定,这主要是因为主动悬架系统中结构的不确定性,而“综合分析能够进行识别。则采用天棚阻尼控制和日。控制对线性主动悬架进行了对比分析研究,指出日。控制在实际应用之前还需进行控制器的缩减。
1.3自适应控制
除最优控制和鲁棒控制外.自适应控制在汽车悬架系统控制中也得到了较大的应用.它是针对具有一定不确定性的系统设计的控制方法,其基本要求也是建立系统的精确数学模型。主要有自校正控制和模型参考自适应控制。前者是一种将受控对象参数在线识别与控制器参数整定相结合的控制方法,而后者则是当外界激励条件和自身参数状态发生变化时,被控对象的振动输出仍能跟踪所选定的理想参考模型。均采用自适应控制方法来提高悬架系统的性能指标。
1.4模糊控制
模糊控制可近似看作自适应控制的一种.它是一种新型的智能控制.模仿人工控制活动中人脑的模糊概念和成功的控制策略.运用模糊数学.将人工控制策略用计算机实现。模糊控制不依赖系统的精确数学模型,因而对系统参数变化不敏感,具有很强的鲁棒性。另外,它的控制算法是基于若干条控制规则.算法非常简捷。则采用模糊控制方法对主动悬架进行了相应的研究分析。其中,采用子系统分层协调的控制方法对整车主动悬架系统进行研究。且与最优控制系统进行对比,表明采用协调控制的综合控制策略在设计阶段能够提供更有效的帮助。且系统的鲁棒性也会得到提高。则将模糊控制与基因遗传算法和PID控制进行了有效的结合,进一步提高了车辆的平顺性。则基于单一的模糊规则对带有动力吸振器的主动悬架系统进行了研究.表明所提出的控制方法能有效地抑制不平路面所造成的车辆振动。
汽车主动悬架用作动器的研究现状
汽车主动悬架系统另外一个关键要素是作动器或执行器(即力发生器),其性能的好坏对控制算法和悬架系统甚至整车性能都有着至关重要的影响,因此对作动器的研究越来越得到研究者们的关注。迄今为止.研究者们开发了多种不同类型的主动悬架作动器.归纳起来大致可分为空气/液压主动悬架、电磁铁主动悬架、滚珠丝杆主动悬架和电磁直线式主动悬架等几大类。
2.1空气/液压主动悬架
早期的主动悬架主要包括空气主动悬架和液压主动悬架。电控空气悬架采用传感器检测车速、油门开度、方向盘转角及车身高度等。通过控制弹簧的刚度、阻尼力和高度等来改变作动器的控制力。将液压主动悬架系统安装在Infiniti Q45豪华轿车上。采用天棚阻尼和频率阻尼装置进行控制系统的设计。主动悬架系统在汽车工业和军事上的应用作了相应的介绍,指出商用车旨在提高舒适性和操稳性.而军用车辆着重于提高越野性能。在主动悬架先驱英国的Lotus Engi—neering公司成功研制出主动悬架后,紧跟其后的又有大量汽车公司进行了研究如Ford和GM。
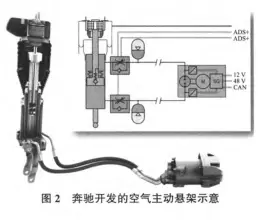
为了充分利用汽车界的主动悬架技术,美国军方联手Lotus Engineering公司开展了高机动性多功能车辆研究项目.所采用的控制算法综合了天棚控制、最优控制、基因遗传及模糊控制等多种控制方法。早期的奔驰CL500车型上采用有液压主动悬架系统,系统采用有13个车载传感器,每10ms调整一次乘坐参数。在2018年巴黎车展上,又发布了在奔驰GLE车型上量产的48 v空气主动悬架系统,该系统可单独控制4个空气弹簧,进一步减小不平路面引起的颠簸感和车身侧倾,如图2所示。
在奥迪新A8车型上.在空气悬架和阻尼控制的基础上,开发了电子主动车身控制系统,如图3所示。该系统通过48 V电气系统操作完成,将电机的扭矩通过带轮传递给轴齿轮,再进一步传递给扭力杆。最后通过连杆将扭矩传递到悬架支柱。此外,该悬架系统还可提前获取车辆前方的不平路面信息。

2.2滚珠丝杆
主动悬架人从机械和电子角度出发,设计并研制了一种滚珠丝杆主动悬架系统,如图4所示。并在此基础上,通过仿真和试验相结合的手段获得了此作动器的频响特性和能量回收特点。

滚珠螺旋传动式无刷电机悬架作动器。对电机作动器的弹性元件、滚珠丝杆和无刷电机等部件进行了结构设计.以及对其输出特性进行了分析和推导。初步验证了滚珠螺旋传动式无刷电机作动器的有效性。
2.3永磁式/感应式电磁悬架
目前,随着汽车电子技术的快速发展,基于电磁原理的主动悬架作动器研究得到了广泛关设计了一种新型的悬架系统,使悬架系统的阻尼系数变化相对较高,同时机械减振器相差太大。此减振器与传统的被动悬架系统并联安装,通过改变初级线圈上的电压来调整减振器的阻尼系数.一旦控制信号或电源失效.被动悬架系统仍可正常工作。考虑到悬架的空间限制及重量等不至于与传统的。
还将液压主动悬架和电磁主动悬架的优缺点进行了对比,其中,液压主动悬架系统和电磁主动悬架系统的构成框图如图5所示,其中图5(a)为单轮液压主动悬架系统,图5(b)为单轮电磁主动悬架系统。
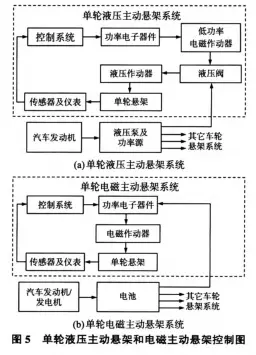
在液压主动悬架系统中。由汽车发动机驱动液压泵从而为悬架系统供给能量,其中液压阀的动作由低功率的电磁作动器来控制。进一步来控制作动器的主动力。而在电磁主动悬架系统中,由带有充电功能的电池系统取代了复杂和昂贵的液压能源系统,因而不再需要液压阀和液压作动系统,通过功率电子转换器所控制的电磁作动器成为这种悬架系统的核心部件。
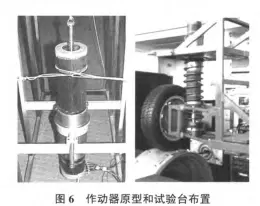
相对液压悬架系统而言,电磁悬架系统中的功率电子元器件要多,然而后者的系统结构由于具有较少的部件和机械部分,系统配置更为简单。还通过有限元仿真分析和计算.研制了一种2相轴向充磁的圆筒型永磁直线作动器,如图6所示。此试验装置中路面激励的模拟不再通过液压方式来实现。而是采用电动机驱动周边含有凸起和凹坑的电动轮来实现。通过试验研究,Martins等得出作动器电磁力的大小基本上与相电流的幅值成正比,因此,可通过控制相电流从而达到控制电磁力的目的。
提出了一种电磁悬架系统.通过多种不同结构配置的优化分析与计算.表明了此无刷永磁圆筒型直线作动器是适用于主动悬架系统,如图7(a)所示。其中图7(a)左半部分为传统的被动悬架系统,图7(a)右半部分为文中所提出的电磁主动悬架系统。采用此拓扑结构的原因是:圆筒型结构的效率高且具有优良的伺服特性,另外由机械弹簧支撑簧上质量,不再需要持续的能量供给。此悬架系统的主要优点是同时考虑到路面干扰及主动侧倾和俯仰控制的影响。图7(b)为1/4车模型的试验测试图,该结构包括一个单独的质量块重450kg,忽略了车轮的动力学.同时还包含BMW545i的被动悬架以及所研制的三相无刷永磁圆筒型电磁作动器。采用前馈和PID反馈控制策略来确保作动力的良好跟踪,试验表明所研制的电磁作动器能完整地跟踪被动悬架系统的阻尼力。
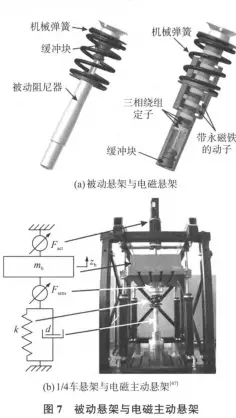
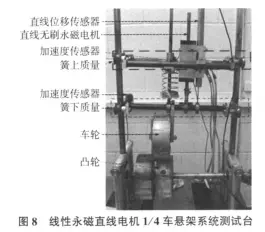
用电磁主动悬架系统可消除车身的俯仰和侧倾,仿真分析表明,与被动悬架系统相比,电磁主动悬架系统的车身侧倾角可减小94.4%。同样利用管型永磁直线电机来充当主动悬架系统的作动器,通过线性最优控制理论与Kalman滤波器设计.并结合模糊控制方法,对1/4车主动悬架系统进行了研究。与被动悬架系统相比,文中提出的模糊控制方法可衰减路面扰动的78%。文中所采用的永磁直线电机的结构和试验台布置如图8所示。此试验装置中路面的模拟依然采用电动轮的方式来实现。
一种感应式直线电磁作动器,并建立了作动器的动力学模型,结合最优控制理论和矢量控制方法.对包含作动器动力学模型的车辆主动悬架系统进行了正弦路面激励下的仿真分析。Bose公司前后花费30年时间和5000万美金,于2004年已研制出车辆电磁悬架,并通过样车测试,如图9所示,Bose悬架系统将直线电磁马达当作传感器和执行器,当车轮向上或万方数据向下运动时,电机会向控制单元发出信号,表明车辆遇到凸包或凹坑;而控制单元则会向每一个电机供给适当的电流从而保持车身平稳。但受成本和功耗制约.直至在被ClearMotion公司收购之前,依然没能实现量产。向下运动时,电机会向控制单元发出信号,表明车辆遇到凸包或凹坑;而控制单元则会向每一个电机供给适当的电流从而保持车身平稳。但受成本和功耗制约.直至在被ClearMotion公司收购之前,依然没能实现量产。

结束语
汽车主动悬架经过多年的理论研究和实践发展.面临的主要挑战依然在于作动器的设计实现和应用。目前由于受成本和功耗制约,电磁主动悬架的产量还未取得突破.主动悬架作动器开发过程中应重点关注主动控制力或者位移.而产生和跟踪所需的控制力或位移实际上并不简单.尤其要综合考虑使用成本、实际封装、重量及由此带来的能量消耗等众多因素。
控制算法作为主动悬架设计开发中的另一个关键因素,一方面要考虑算法自身的鲁棒性和适应性.另外还应结合作动器的动态特性,而且未来还将以汽车整车安全性作为首要目标进行考虑。先进的主动悬架设计一方面要通过计算机仿真分析、台架试验,另外最终还需通过整车道路的验证试验来进行评估。综合来看,汽车悬架系统的性能优越程度将取决于智能的控制软件和设计精巧的作动器硬件两者之间的完美结合程度。基于车辆顶层目标和模型化设计的系统工程。以及汽车电子、微控制器和相应传感器技术的发展.未来的悬架系统也将更加智能和节能。







最新资讯
-
R171.01对DCAS的要求⑤
2025-04-20 10:58
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
