




 广告
广告





















































设计仿真 | 基于VTD的多物理传感器自动驾驶系统仿真方案


随着自动驾驶算法等级的不断提高,各开发商的传感器布置方案也越来越丰富,最典型的为多V、多R及多L的方案。而在对多种类,多数量的传感器进行物理模型仿真时,会占用大量的计算资源和网络通讯资源,同时仿真的效果还受到PCIe总线带宽及显卡的接口数量限制。

基于VTD的多物理传感器自动驾驶系统仿真方案,采用VTD的主从机布置方式,将VTD软件安装在主机Master上,从机slave上只安装运行VTD所需要的依赖,主机以mount的方式将仿真软件映射在从机Slave相应的位置。在主机中配置各类型传感器运行的显卡平台,仿真开始时,主机以ssh的方式将传感器的计算任务下发到从机Slave的显卡,以调用从机Slave的计算资源,达到仿真对速度的要求。各个计算机的显卡将计算完成的数据,分别通过HDMI和以太网的数据,发送到视频注入板(FPGA)或直接发送给被测系统SUT。从而在感知层实现全链路仿真。该系统可以满足用户:
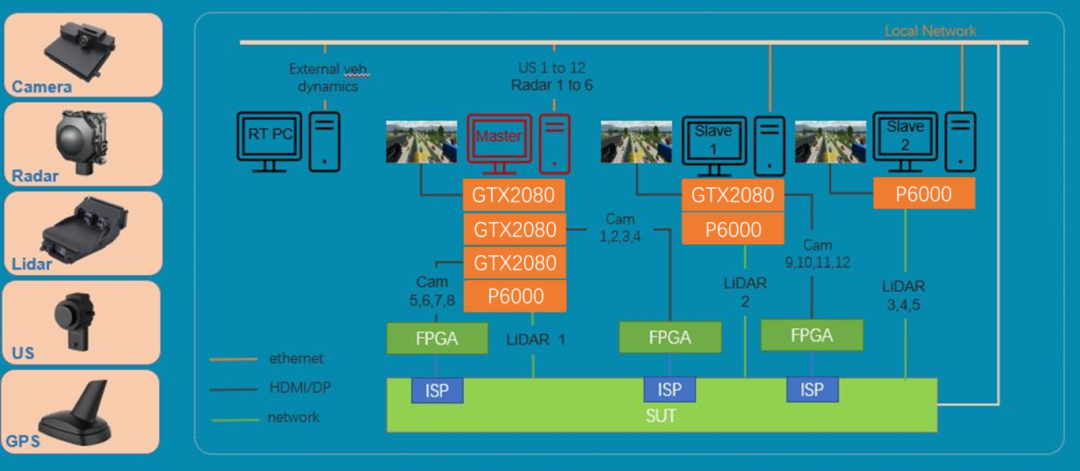
01 同时进行多路视频数据的感知算法验证;
02 同时进行多路激光雷达点云数据的仿真验证;
03 同时进行多路毫米波雷达点云数据的仿真验证;
04 可进行多V多R和多L的物理模型仿真验证;
05 可进行行泊一体的算法仿真验证。
VTD方案优势
支持主从机的布置方式,合理分配计算资源;
主从机采用同一套仿真软件,降低软件成本;
根据显卡的种类(图形卡/计算卡)合理分配计算任务;
从机数量可扩展。



编辑推荐




最新资讯
-
货车侧滑检测异常数据集群的成因分析 ——
2025-04-09 15:32
-
网络研讨会 | 4月16日HBK智能传感器
2025-04-09 12:21
-
褚教授课程笔记 | 工作变形分析(Operating
2025-04-09 12:19
-
深度讲解仰望U7水平对置发动机
2025-04-09 12:15
-
重磅!东风汽车重大突破
2025-04-09 12:15
