




 广告
广告





















































生成抽象场景的挑战与方案

内容概览
第一部分:引言——研究抽象场景的动机与挑战
第二部分:示例——基于SOCA的抽象场景生成和描述方法
第三部分:示例——基于矩阵形式的抽象场景生成和描述方法
第四部分:结语——现有方法局限的总结
1 引言
1.1 研究抽象场景的动机
对于自动驾驶系统(Automated Driving System,ADS)的测试目标一直以来有两类技术路线:「里程覆盖」和「场景覆盖」。众所周知,前者相对简单粗暴直接;然而对于复杂(内部异质性高的)环境来说,需要验证多长的里程才是足够的里程,其答案要么让人不舒服(可行性极低),要么让人不安心(结果的置信太低)。
当我们在上述分叉路口,选择走上「场景覆盖」或者基于场景的测试验证道路的时候,就需要面对「纵向」「横向」两类问题。
其中,「纵向」是指场景的全生命周期,从怎么构成,到怎么逐级细化,怎么逐步使用,包括:
场景要素:从要素层面构建一类场景,包括经典的六层场景要素模型,或基于此形成的七层场景要素模型:1-道路结构;2-道路设施;3-道路和设施的临时改变;4-交通参与者;5-气候环境;6-通信状态;7-自车状态和行为。
描述语言:从无到有、从粗到细地定义和描述一类场景,包括不同抽象层级的场景描述语言(见图1):功能场景->抽象场景->逻辑场景->具体场景。
场景测试:从场景文本到数字模拟环境、物理模拟环境到真实环境实现基于一类场景测试的全过程。
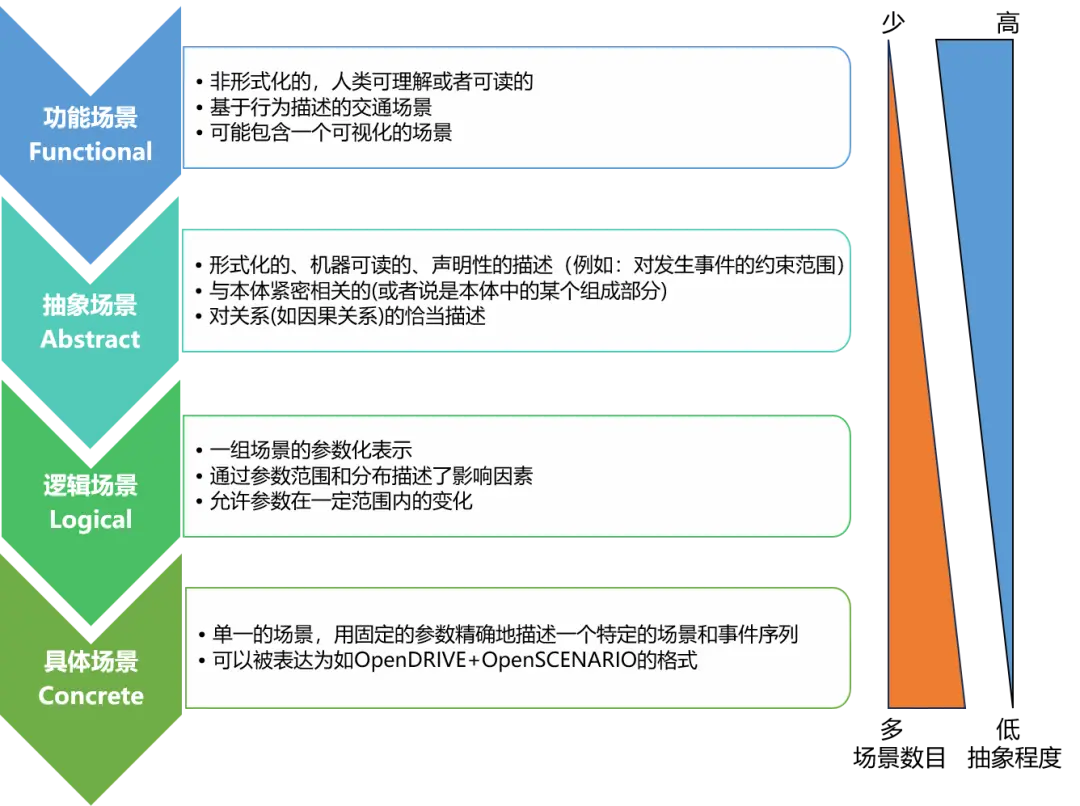
图1 四种抽象层级的场景描述
如果从2016年的PEGASUS项目和2018年的SAKURA项目算起,在这条基于场景的测试验证道路上,各国已开展了7、8年的大规模探索了,上述关于场景要素、描述语言和场景测试的三方面问题已经被解决得七七八八了,除了:
描述语言:还欠缺对功能场景和抽象场景的规范化描述方法。
场景测试:在可信、真实、高效等方面还有长串的技术问题待解决。
那么「横向」呢?
回到“场景覆盖”的目的,横向是要回答「场景的全集是什么?有多少?」
在这个问题上,我们前进得不多。在低级别自动驾驶系统上,所累积的经验和方法论,在面对功能的复杂化和ODD(Operational Design Domain)的扩大化时,显得苍白无力。
是时候,直面这个挑战了。
1.2 抽象场景描述的目标和挑战
先简单回顾一下,在这个横向维度上,专家学者们所做过的一些研究和方案(见表1):
表1 场景覆盖方案
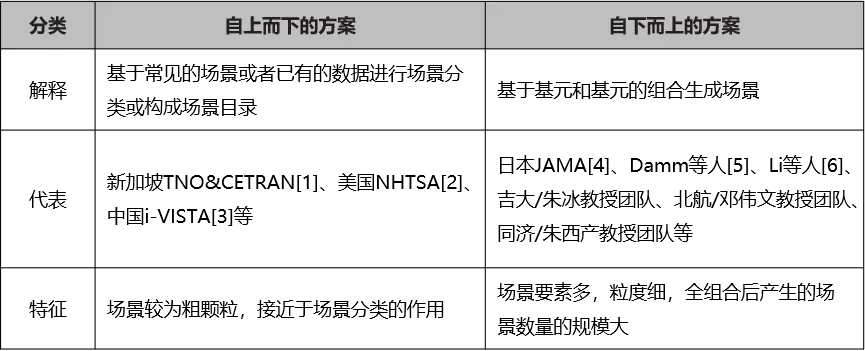
在这两类方案之间,是否能找到一种方案,同时兼具:「场景覆盖」和「高效生成」,也即得到的场景集合对于需要测试论证的自动驾驶系统来说既是是充分的也是必要的?
以此为目标的话,大体的实现思路如下:
在抽象场景层级上实现场景覆盖:既有可能严谨地回应「场景覆盖」的需求;也可能通过工具的编译,自动化地向下实现逻辑场景或具体场景的生成,从而支持基于场景的测试;
结合自动驾驶的预期功能进行抽象场景生成:能有的放矢地生成(或选择)待测场景,从而避免大量冗余场景的生成,实现高效生成。
聚焦「生成抽象场景的挑战与方案」,本文梳理了两篇相关论文,提炼其中的共性技术框架,结合路口、匝道口和路段等典型道路结构的实例,介绍相关技术方案。
1.3 抽象场景描述方法框架
面向抽象场景的生成及描述,这两篇论文所采用的技术框架相似,均可被归纳为四个核心模块,即道路空间划分、ADS决策空间的构建、ADS的决策行为及基于决策行为的等价类划分和抽象场景生成:
「模块一:道路空间划分」
将场景中具体的道路几何结构以一定的方式划分为有限个区域,以便对道路信息进行抽象提取,从而实现后续基于区域的分析。例如,图2展示了对一段单向双车道道路的划分示例,包括A、B、C、D四个区域,其中ADS在区域A。
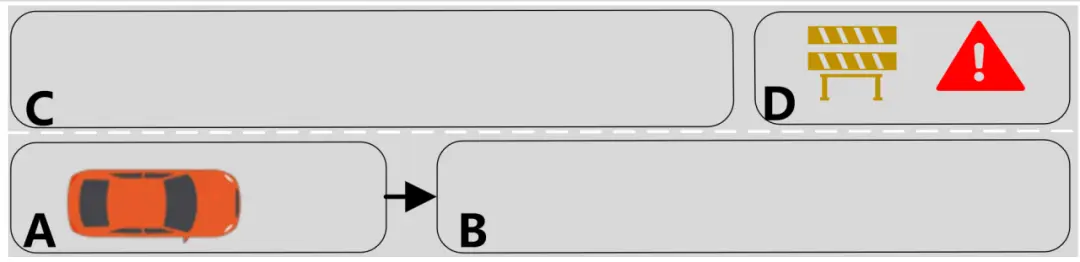
图2 道路空间划分示例(参考区域图方法,详情见下文)
「模块二:ADS决策空间的构建」
场景空间是指场景中全部要素所有可能的状态的集合,而决策空间是场景空间的子空间,其中包含了可能影响ADS决策行为的要素及其状态。
决策空间中存在不同的情景(Situation)。例如,表2是在上述区域图的基础上构建的决策空间示例。通过对表2各个维度的状态进行组合,可以得出在图3中的情景示例,如情景①中,区域C存在一辆向区域B变道的车辆,对自车产生威胁;在情景②中,区域B的车辆减速,使得与自车的车距小于安全距离,产生威胁。
表2 决策空间示例

「模块三:ADS的决策行为及基于决策行为的等价类划分」
为了有效地归类决策空间中的情景,一种思路是建立情景与ADS决策行为的映射关系,这个映射关系构成了行为等价类的概念。行为等价类是基于ADS决策行为对决策空间的归并,本质上是经过归类的情景集合,归类的依据是ADS在特定情景中需要执行的预期正确决策行为。换言之,在一个行为等价类中的所有情景中,ADS的预期正确决策行为是相同的。
通过对ADS决策空间的情景进行遍历,专家可以为ADS设计各种情景中的预期正确决策行为。例如,对于一个AEB系统而言,其主要决策行为是紧急制动,因此可以定义行为等价类“紧急制动”,该等价类包含情景①、情景②等情景(见图3)。这种归类方法有助于对ADS的决策空间进行有效的梳理。
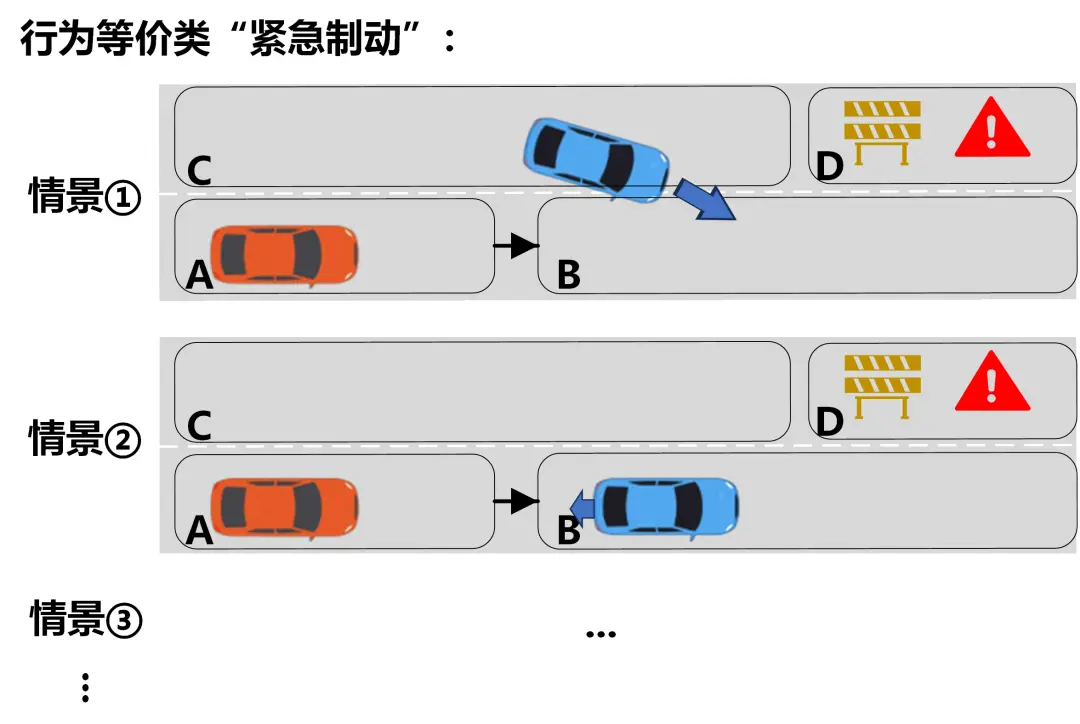
图3 行为等价类示例
「模块四:抽象场景生成」
抽象场景生成:基于决策空间和决策行为等价类,我们可以分别得出情景和ADS的决策行为,将它们进行组合,实现抽象场景生成。
连续抽象场景生成:将上述单个抽象场景按照时间顺序,在空间连续的条件下进行组合,即实现连续抽象场景生成。
基于上述四大核心模块,所提出的抽象场景方法框架对场景中所有可能直接影响ADS决策行为的要素进行了抽象和组织(见图4),进而生成抽象场景。图5展示了四个模块之间的关系。后续将基于这个框架,结合路口、匝道口和路段等典型道路结构的实例,介绍两种抽象场景生成及描述方法。
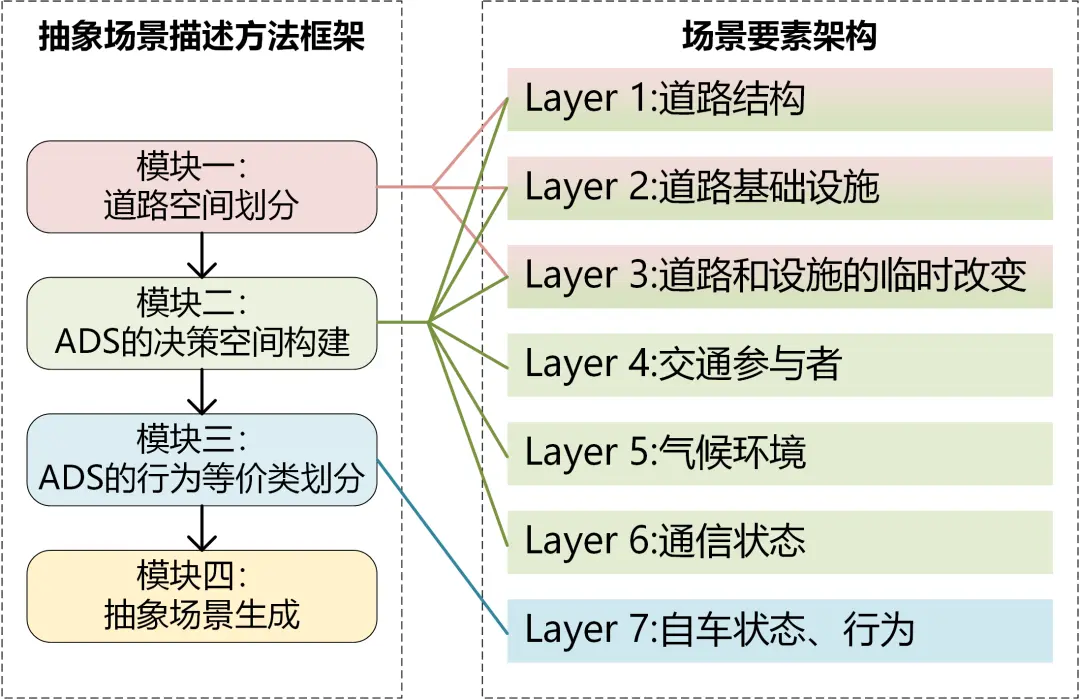
图4 抽象场景方法框架
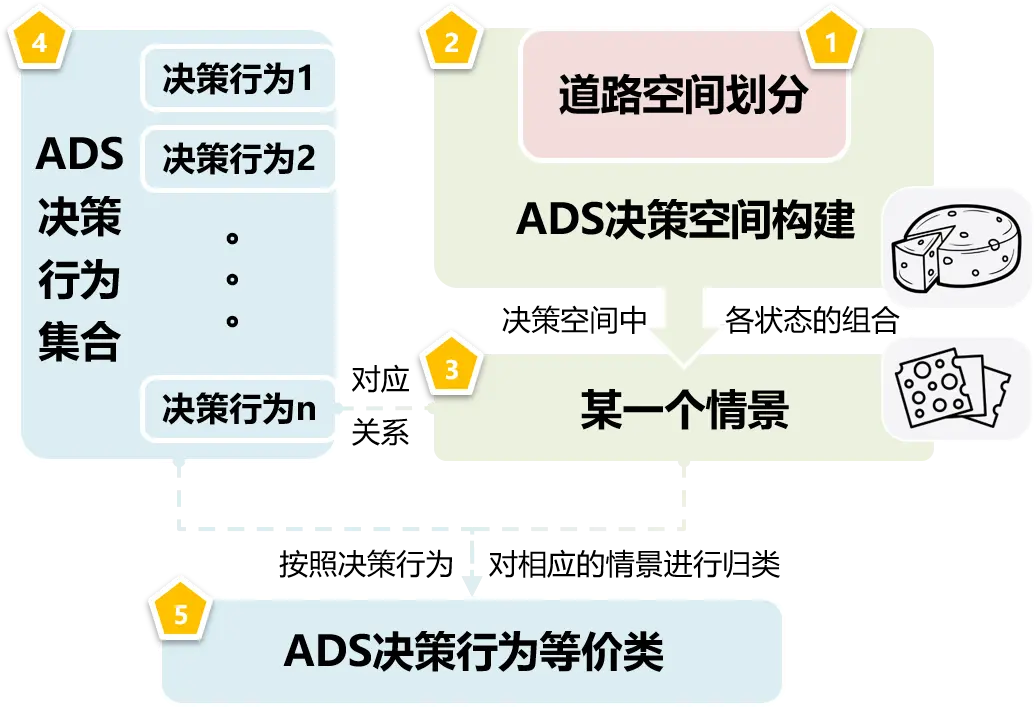
图5 核心模块的相互关系
2 基于SOCA的抽象场景生成和描述方法,以十字路口为例
2.1 SOCA简介
博世公司提出了SOCA方法(System co-design for open context analysis, 用于开放环境分析的系统协同设计)[7],该方法被用于描述抽象场景,并在自动驾驶测试评估相关的国际标准ISO 34502:Scenario based safety evaluation framework[8]的附录中得到引用。本节将以前文提到方法思路为脉络,介绍SOCA方法如何描述抽象场景。
2.2 道路空间划分
SOCA方法通过区域图方法来划分道路空间,将具体的道路几何结构以及具体的交通参与者的抽象为不同的区域。本节通过ADS在十字路口右转的场景(见图6)示例来说明区域图的构建方法,见图7。
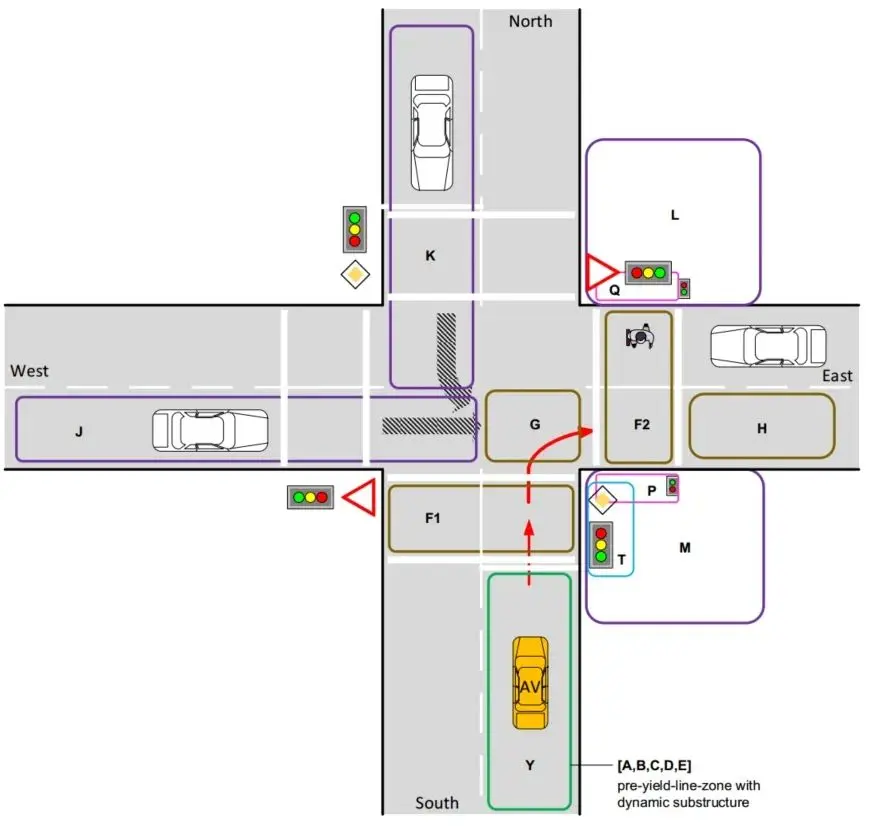
图6 十字路口右转场景示意图,橙色的车辆表示自动驾驶车辆
区域图由不同类型的区域和边界组成,区域的位置和大小并不是固定的,可以随具体场景的情况来决定大小。区域图包含以下类型的区域:
驾驶区:用于表示ADS存在的区域,其遵循ADS的行驶意图进行构建,不同驾驶区之间由带有方向的边界连接,用于表示ADS的路径;在示例中,根据ADS的右转行驶意图构建驾驶区(Y、F1、G、F2、H),并使用红色箭头表示ADS的路径。
位置区:用于表示其他交通参与者的位置,对于所有可能干扰ADS通过驾驶区的交通参与者构建位置区域。在示例中,因为行人在过马路时会对驾驶区F2构成威胁,所以划分位置区L和位置区M,此外可能存在如急救车等应急车辆威胁到驾驶区G的情况,因此划分位置区K和J。
信息区:用于表示交通信息,包含每个可能存在的影响ADS决策基础设施要素,如交通灯和路牌等。在示例中,信息区T表示了交通灯状态。
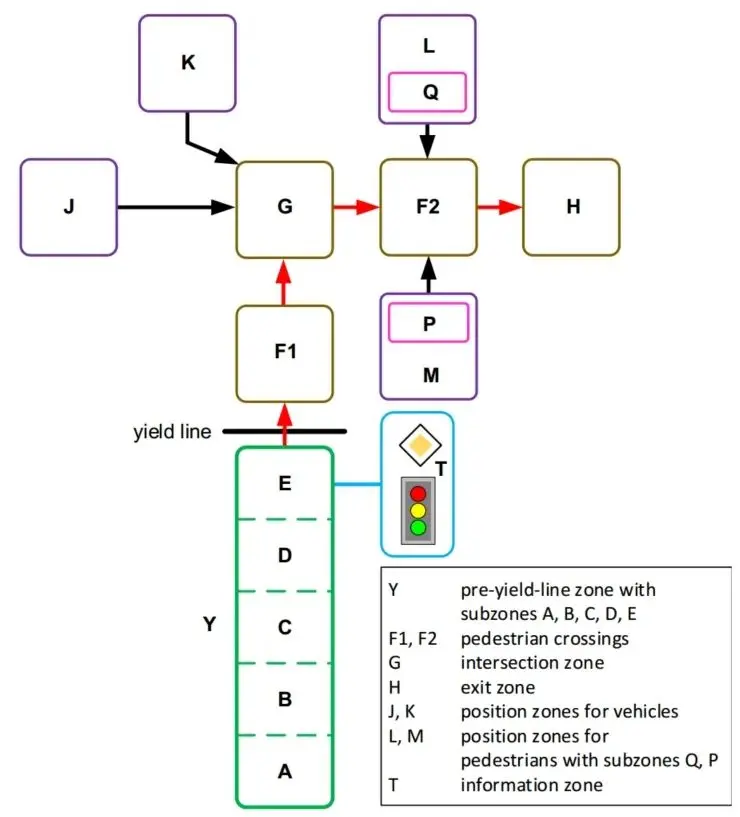
图7 十字路口右转的区域图示例
2.3 ADS的决策空间构建
通过对道路空间进行划分,能够帮助梳理场景中影响ADS决策的要素。在区域图的基础上设计ADS的决策空间,在上述例子中,ADS的决策空间如表3所示。
表3 ADS在十字路口右转的决策空间
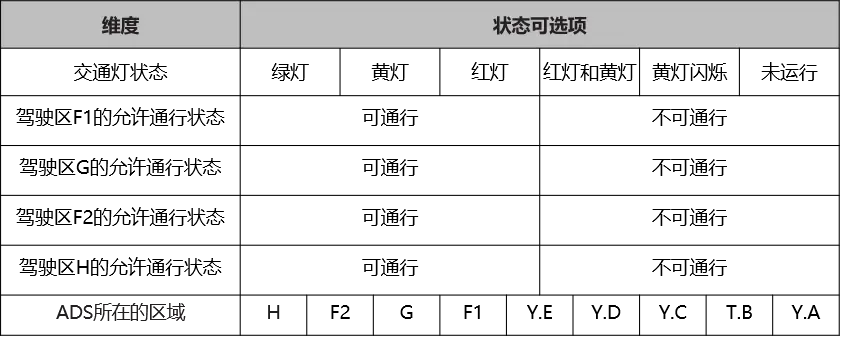
决策空间中的每个维度是场景信息的一个方面,对于每个维度设置离散的状态集,要求状态之间是互不相交的,且每个维度的状态应该是全集。每个维度的状态组合在一起,可得到一个情景,在这个例子中,共有6×2×2×2×2×9=864种情景。值得一提的是,维度的选择主要取决于区域图,而状态可选项的设置则受到研究目的影响,可根据研究目的设置更具体的状态可选项,只需要保证状态可选项的互斥性和维度的完备性即可。
2.4 基于ADS的决策行为的等价类划分
对于每个情景,都根据专家知识设定在这个情况下ADS应该做的行为。在十字路口右转的区域图中,结合表3的决策空间,可以设置如下的行为等价类:
继续前进
舒适地停车在让行线前
安全地停车在让行线前
紧急地停在让行线前
闯红灯且驾驶区F1不可通行
闯红灯但未陷入危险
发生险情或事故
安全地停在驾驶区G
安全地停在驾驶区H
在没有交通灯的十字路口行驶
在设计行为等价类时,通常先从比较明显的情景开始设计等价类,如当交通灯处于黄灯或红灯的状态且自车处于驾驶区Y.B时,ADS应该采用舒适的制动强度停止在让行线前面,而对于这个行为来说,决策空间的其他维度的状态是无关紧要的,所以「舒适地停车在让行线前」这一行为等价类共包含2×2×2×2×2×1=32种情景。
行为等价类的设计需要满足完备性和一致性,完备性是指决策空间中存在的情景都被添加到至少一个行为等价类中,一致性是指决策空间中的情景都被添加到了最多一个行为等价类中。为保证等价类的完备性和一致性,在SOCA方法中,专家设计行为等价类的过程时,会使用系统级辅助开发的SCODE(System Co-design,系统协同设计)工具[9]同步检查满足情况以及计算剩余决策空间给出选择建议。
以上由原论文作者设置的行为等价类仅供参考,并不是唯一答案,若研究出发点不同,在实践时可以修改决策空间的颗粒度,然后基于决策空间设计不同的行为等价类。
2.5 抽象场景生成
综上,前文中三个核心模块成功地实现了对场景各要素的抽象描述。以下是一个示例,展示如何使用三个核心模型生成抽象场景:
道路结构、道路基础设施:
见图7的区域图
ADS的行为:
安全地停在驾驶区G
情景:
驾驶区F1的允许通行状态=可通行
驾驶区G的允许通行状态=可通行
驾驶区F2的允许通行状态=不可通行
驾驶区H的允许通行状态=不可通行
ADS所在的区域=G
3 基于SOCA的抽象场景生成和描述方法,以匝道路段为例
在本节,将介绍运用SOCA方法分析高速公路上ADS匝道汇入的例子,帮助读者更好的理解抽象场景的生成方法。
3.1 道路空间划分
以高速公路匝道汇入为例,构建区域图(见图8)。ADS处于匝道上,意图向主路汇入。
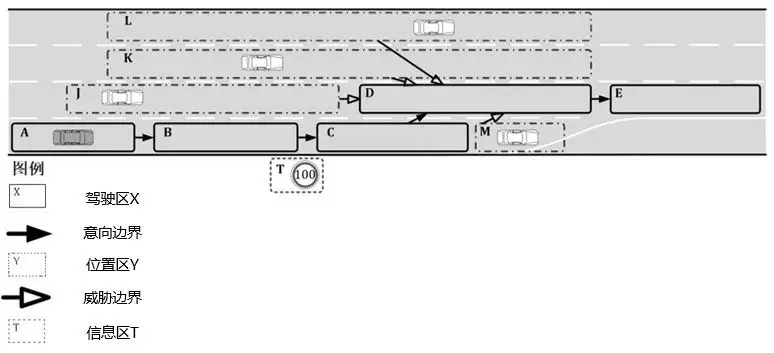
图8 高速公路匝道汇入的区域图
3.2 ADS的决策空间构建
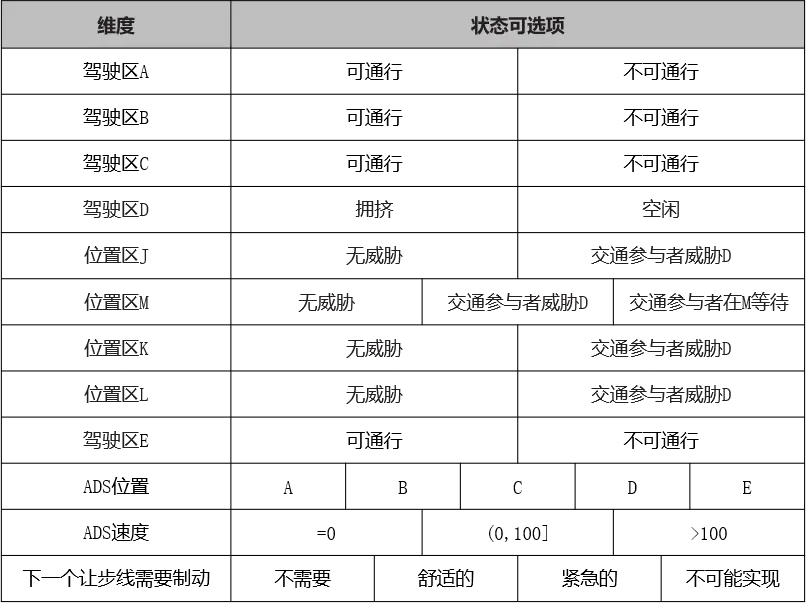
根据区域图,设计决策空间(见表4),其中主要关注驾驶区D的通行状态,分析了各个位置区对驾驶区D的影响,以决定驾驶区D的可通行状态,为了简化决策空间,驾驶区A、B、C、E设置为「可通行」和「不可通行」。
表4 高速公路匝道汇入的决策空间
3.3 基于ADS的决策行为的等价类划分
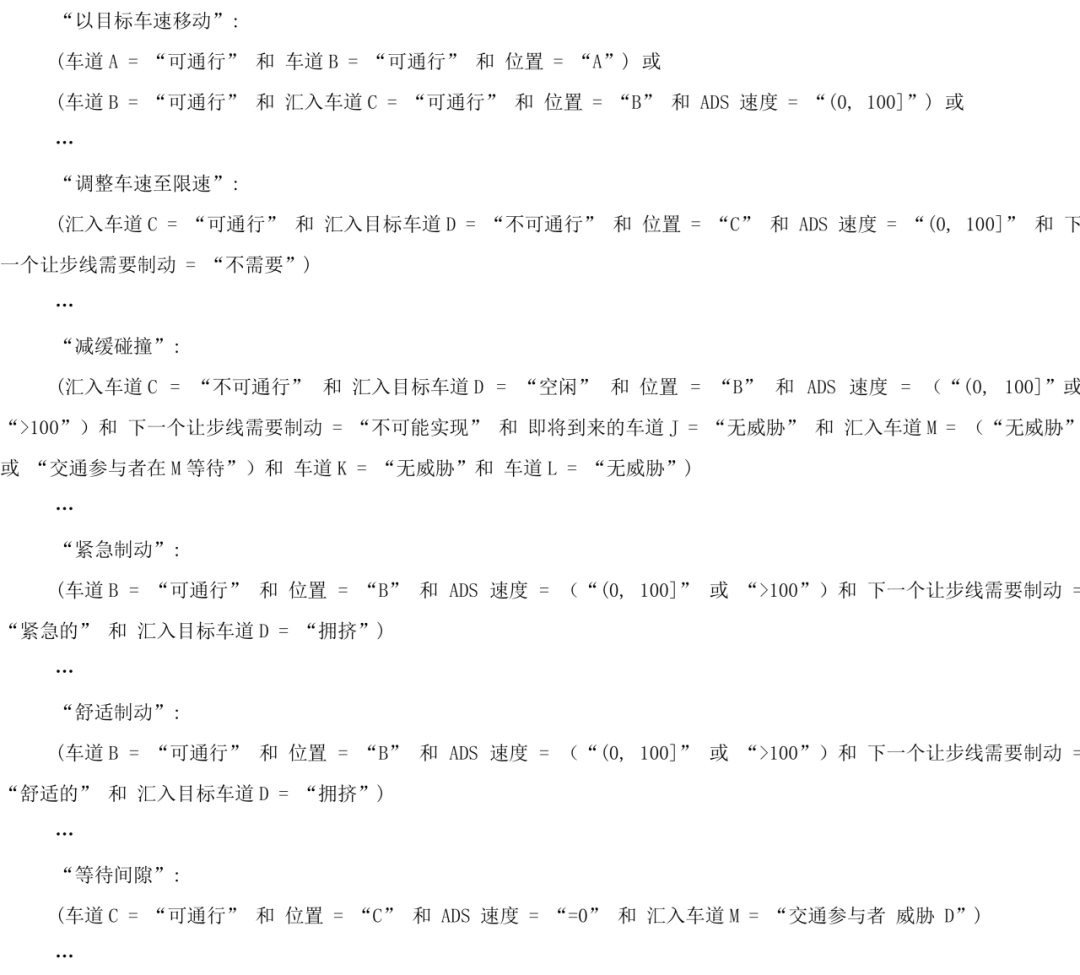
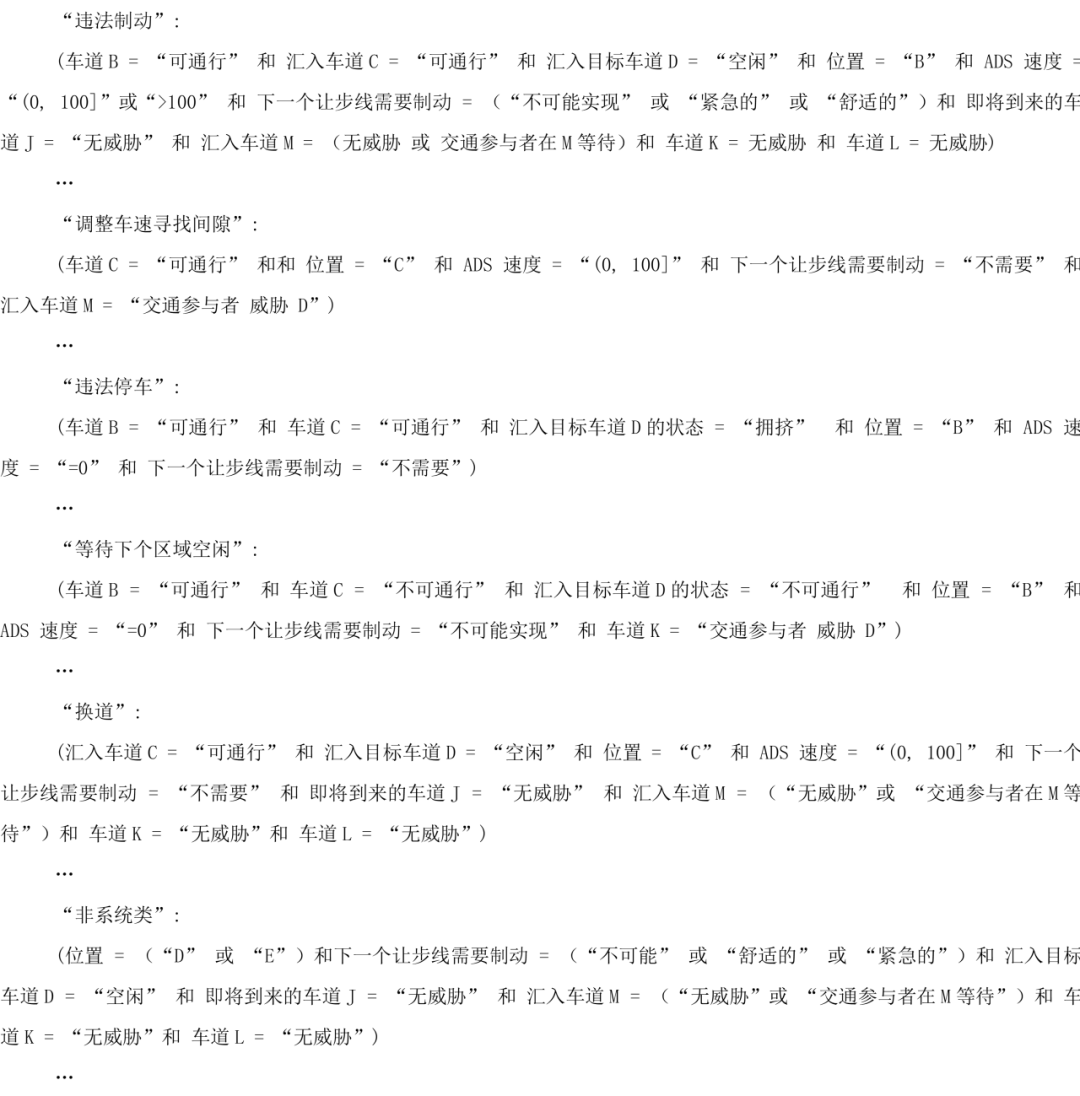
在这个例子中,作者设计了十一个行为等价类,和一个非系统类。非系统类是指抽象场景中所有不可能发生或无意义的情况,在这些情况下不需要设计ADS的行为。行为等价类如下所示:
以目标车速移动
调整车速至限速
减缓碰撞
紧急制动
舒适制动
等待间隙
违法制动
调整车速寻找间隙
违法停车
等待下个区域空闲
换道
为了方便读者更好的理解等价类的含义,我们给出每个行为等价类的一个情景示例:
3.4 抽象场景生成
通过使基于单个ADS行为的抽象场景按照时序和逻辑关系进行组合,可以形成连续的抽象场景,图9展示了ADS成功汇入匝道的连续抽象场景示例。
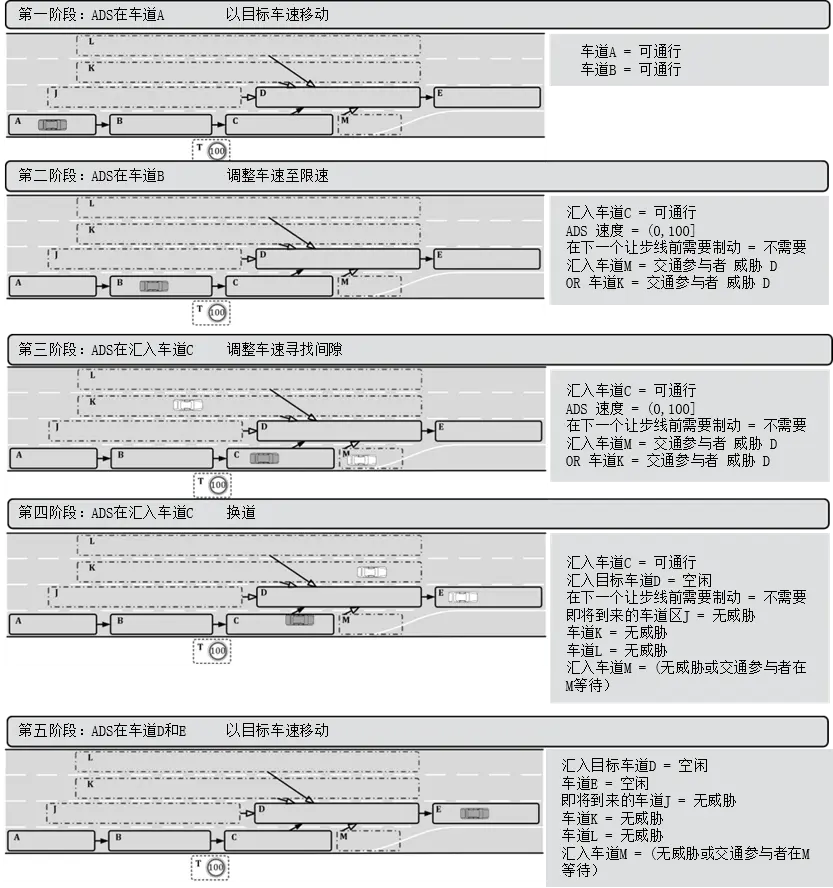
图9 连续抽象场景生成示例
4 基于矩阵形式的抽象场景生成和描述方法,以直行路段为例
本节以三车道直行路段为示例,将抽象场景以可计算、可解释的矩阵形式描述[10],并以自车为参考系来表达其他交通参与者(以汽车为例)相对自车的状态(相对速度大小、距离远近等)。
4.1 道路空间划分
将场景中的道路拓扑结构用以自车为参考系的栅格形式进行表达,如图10所示,具体如下:
在自车周围一定横向和纵向范围内,将三车道路段划分成若干栅格,其中的每行栅格对应一条车道
每个栅格所覆盖的距离范围与自车速度成正相关
在被占用栅格中采用惯性系数β表达周围车辆相对自车的速度,下式给出一种计算示例
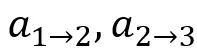
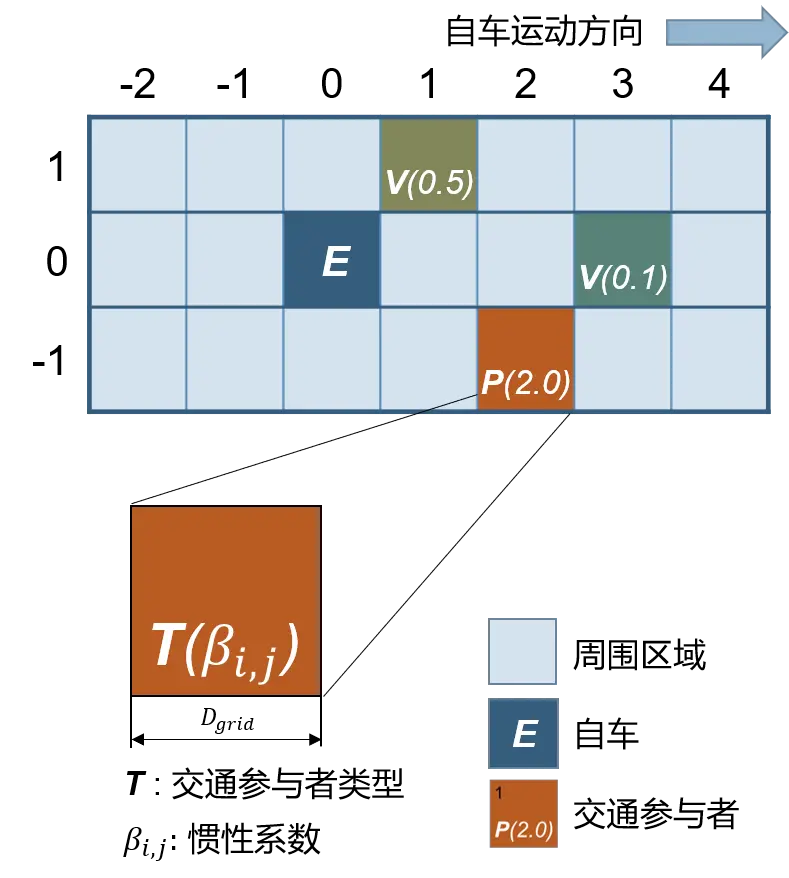
图10 三车道路段栅格描述示意图
4.2 场景矩阵
为了自动化生成抽象场景,基于以上的栅格表示方法,将栅格转换为矩阵形式。下方矩阵B是对图9的场景栅格的表示。
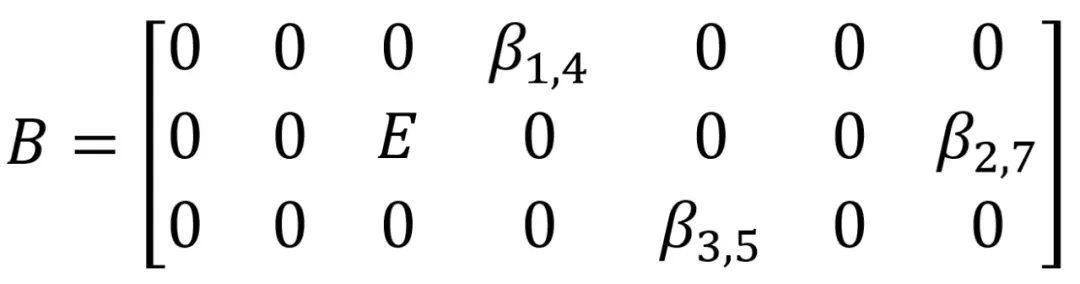
同样地,场景中背景车的动作也按照矩阵形式进行描述,包括速度变化,即速度保持、加速和减速;横向位置变化,即车道保持、向左或向右变道。二者可同时执行,故最多可有3x3=9个不同动作。
背景车的动作矩阵设计如下:
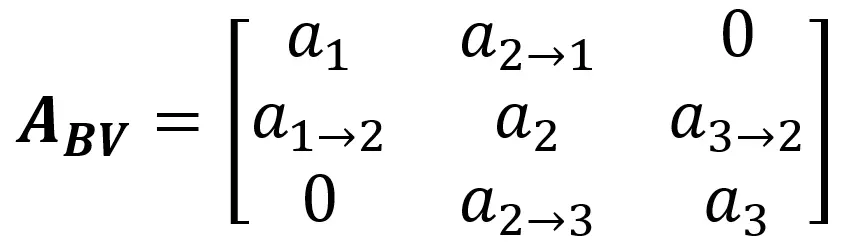
矩阵中的对角元素表示车道保持;
表示向左变道;
将动作矩阵与状态矩阵相乘,结果即对应着每个背景车执行动作后的中间情景。例如, 处的车道保持和向右变道动作分别表示为A=(
处的车道保持和向右变道动作分别表示为A=( ,0,0;0,0,0;0,0,0)和A=(0,0,0;
,0,0;0,0,0;0,0,0)和A=(0,0,0;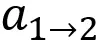 ,0,0;0,0,0)。(感兴趣的读者可计算一次矩阵乘法,从而更好地理解此过程)
,0,0;0,0,0)。(感兴趣的读者可计算一次矩阵乘法,从而更好地理解此过程)
4.3 ADS的决策空间及行为等价类划分
本节的道路拓扑结构相对简单,从简单的决策空间分析,参考了IDM的功能对ADS的行为等价类进行划分。表5给出了一种行为等价类与其对应情景的划分方式。若ADS功能更加高级和复杂,可以参考文献[11]中所提出的方法分析决策空间并划分其行为等价类,以保证等价类划分的完备性和一致性。
表5 ADS的行为等价类与其对应的情景
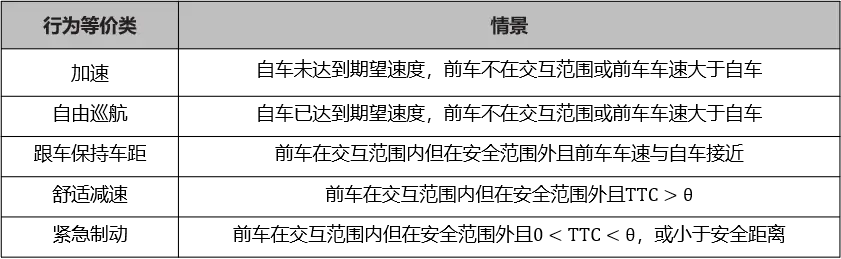
注:表中的期望速度、交互范围、安全范围和TTC阈值θ,可根据需要自行设计和定义
4.4 抽象场景生成
以下式所示矩阵作为初始场景,背景车初始的惯性系数设置为0.1。
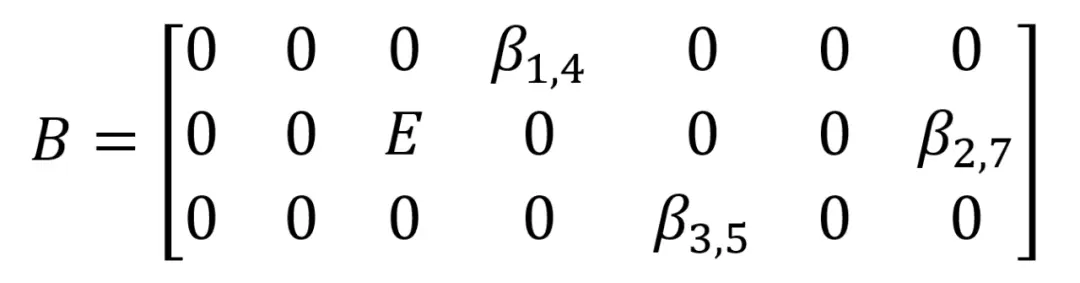
图11是一个抽象场景生成示例。背景车首先执行动作,情景变为 ;然后自车根据此时情景做出决策行为(紧急制动),同时更新纵向位置,即完成一次场景生成。更新场景时,为了保证自车在矩阵中的位置始终不变(始终以自车为参考系),按照自车执行动作刚好相当于背景车执行相反动作的原则更新矩阵。例如,自车紧急制动相当于所有背景车加速(所有背景车惯性系数减小,纵向位置向前移动一格)。
;然后自车根据此时情景做出决策行为(紧急制动),同时更新纵向位置,即完成一次场景生成。更新场景时,为了保证自车在矩阵中的位置始终不变(始终以自车为参考系),按照自车执行动作刚好相当于背景车执行相反动作的原则更新矩阵。例如,自车紧急制动相当于所有背景车加速(所有背景车惯性系数减小,纵向位置向前移动一格)。
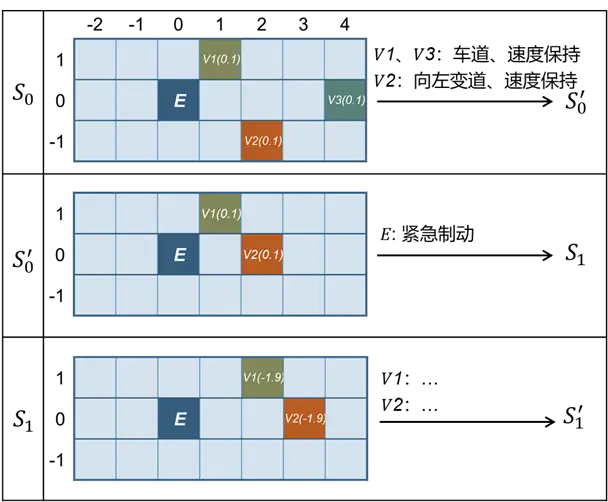
图11 抽象场景生成示例
可以遍历背景车的所有动作,以保证生成场景的全面性。初始场景迭代一次后,从中随机选取若干个场景作为下次迭代的初始场景。如此反复迭代,即实现了直行三车道路段的连续抽象场景生成。一个迭代3次的连续抽象场景生成过程示意如图12所示。
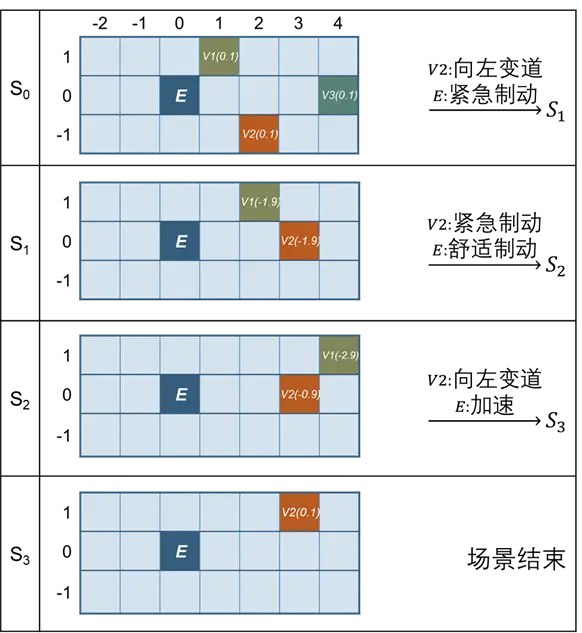
图12 连续抽象场景生成过程示意图
5 结语
最后,编者希望探讨该方法框架的难点。在这一方法框架中,每个核心模块都必须结合专家知识来构建,这导致无法实现一键生成抽象场景,同时也意味着场景覆盖的范围取决于专家的经验和能力。并且随着决策空间维度的增加,将增大方法的人力成本。另外,在方法框架中可能需要多次迭代,包括对决策空间和等价类的反复调整和优化。由于行为等价类必须同时符合完备性和一致性要求,这实际上对行为等价类和决策空间施加了限制。然而,这种限制并不会在创建决策空间和设计等价类时直接显现出来,而是需要在检验阶段才能被发现。
「参考文献」
[1] Erwin de Gelder (TNO), Olaf Op den Camp (TNO), Niels de Boer (NTU). Scenario Categories for the Assessment of Automated Vehicles, Version 1.7[R]. 2020.
[2] NHTSA. Pre-Crash Scenario Typology for Crash Avoidance Research[R]. https://www.nhtsa.gov/automated-vehicles-safety/published-reports-and-documents. 2007.
[3] i-vista.中国智能汽车指数网[EB/OL].[2024-03-12].https://www.i-vista.org/
[4] Japan Automobile Manufacturers Association, Inc. Automated Driving Safety evaluation framework Ver 3.0[R]. 2022.
[5] Damm W, Möhlmann E, Rakow A. A scenario discovery process based on traffic sequence charts[J]. Validation and Verification of Automated Systems: Results of the ENABLE-S3 Project, 2020: 61-73.
[6] Li C, Sifakis J, Wang Q, et al. Simulation-based Validation for Autonomous Driving Systems[C]//Proceedings of the 32nd ACM SIGSOFT International Symposium on Software Testing and Analysis. 2023: 842-853.
[7] Butz M, Heinzemann C, Herrmann M, et al. SOCA: Domain analysis for highly automated driving systems[C]//2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2020: 1-6.
[8] International Organization for Standardization. Road Vehicles-Test Scenarios for Automated Driving Systems-Scenario based Safety evaluation framework: ISO 34502: 2022[S]. Geneva, Switzerland: ISO, 2022
[9] Bitzer M, Herrmann M, Mayer-John E. System Co-Design (SCODE): methodology for the analysis of hybrid systems: A systematics for complexity reduction of control software in embedded systems[J]. at-Automatisierungstechnik, 2020, 68(6): 488-499.
[10] Xing Xingyu, Liu Zhenyuan, Feng Tianyue, Chen Junyi, Yu Zhuoping. Function-Driven Generation Method for Continuous Scenarios of Autonomous Vehicles[C]//SAE 2022 Intelligent and Connected Vehicles Symposium. SAE, 2022.
[11] 熊璐,贾通,陈君毅,邢星宇,李博.基于有限状态机的预期功能安全危害识别方法[J].同济大学学报(自然科学版),2023,51(04):616-622.



 广告
广告
编辑推荐




最新资讯
-
日本汽车召回制度概述
2025-03-14 08:19
-
标准立项 | 《固体电解质比表面积测定 气体
2025-03-13 17:14
-
中汽中心工程院与赛力斯汽车携手成立数智研
2025-03-13 17:13
-
GB/T 45314-2025《道路车辆 免提通话和语音
2025-03-13 17:12
-
我国汽车行业首个直连通信国家标准正式发布
2025-03-13 17:12
