




 广告
广告





















































关联系统-智能集成制动系统IPB

作者:王文林 | 奇瑞自动驾驶产品经理
整车制动原理
在讲述IPB之前,需要先了解一下整车的制动原理:

如上图所示:
驾驶员踩下制动踏板,由于制动踏板和真空助力器连接,踏板下降的同时会导致真空助力器内压力增大,真空助力器推动制动液进入ESP,ESP根据四轮摩擦力分别给四轮分配制动液,制动液到达轮端制动钳后,会推动摩擦片夹紧,夹紧时会与制动盘产生摩擦力,此时制动盘会因为摩擦力而减速,制动盘与车轮是通过转向节连接在一起的,制动盘减速会导致车轮减速转动,从而表现到整车上就是整车减速行驶。
智能集成制动系统IPB
上图为传统机械制动原理,属于比较老的技术,当前最新设计是基于之前的作了优化:
——真空助力器优化:
1.之前真空助力器为纯机械结构,体积比较大,新一代产品将机械结构去除,采用电子助力,简称ibooster,相比传统设计,其体积更小,更轻,减少了对布置空间的要求
2.之前制动踏板与真空助力器为物理连接,真空助力器是直接根据踏板实际行程进行增压的,采用ibooster之后,制动踏板与助力器之间不再直接物理连接,而是通过踏板模拟信号进行关联的
——ESP与ibooster集成:
1.ESP为车身稳定系统,其控制车身四轮的制动液分配,与ibooster同属制动系统中的一环,新一代产品将ESP与ibooster集成在一起,变为一个零部件,相比之前,体积更小、重量降低、成本变低,优势比较明显;而结合之后的这个产品就是IPB
——制动系统集成度提升:
1.采用IPB之后,整车制动系统集成度提升,参考上图,最终的整车制动链路变为:制动踏板—IPB控制器—车轮,整车集成度变高
IPB内部功能
上面我们已经了解了整车的制动原理,知道整车的制动系统是通过IPB对四轮制动液的分配来进行制动力调整的。这些制动液的分配是存在很多策略,不同的场景下,应用的策略也不一样。
ESP电子稳定程序(VDC)
ESP功能主要针对转向不足以及转向过度场景:
——转向不足:
如上图所示,由于车速过快或前轮抓地力不足,导致车辆前轮并没有按照车轮指向的方向前进,而是存在一定偏差,这种现象就是转向不足,如果车辆配备ESP功能,此时ESP将通过对内侧后轮施加制动,让车头向弯道内侧横摆以达到预期转向效果
——转向过度:

如上图所示,由于急促打方向盘或后轮抓地力不足,导致车辆出现甩尾现象,这种现象就是转向过度,如果车辆配备ESP功能,此时ESP将通过对外侧前轮施加制动,减弱甩尾现象,保证安全
ABS防抱死制动系统
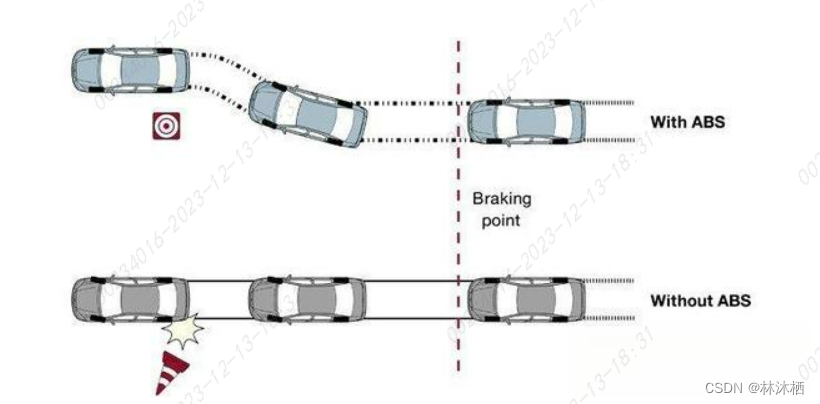
如上图所示,当车辆处于快速运动时,如果轮胎抱死,此时会存在巨大的惯性,会导致在滑行过程中,转向不起作用,这就导致驾驶员在紧急制动时,无法通过转向去避开障碍物,从而发生碰撞;如果车辆配备ABS功能,系统将会在车轮即将抱死时,释放制动,然后再执行制动,通过极限点刹去减速,这样,在减速的同时不会导致横向控制失效,从而在极限刹车时不会失控。
TCS牵引力控制系统
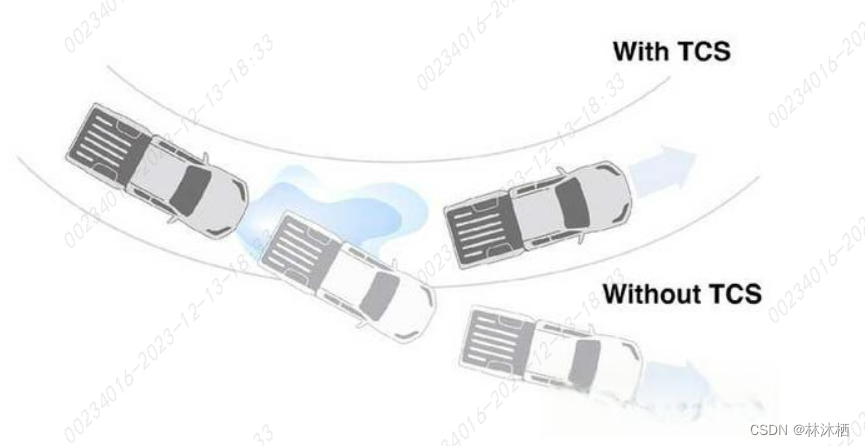
如上图所示,当车辆处于积雪、积水、结冰等摩擦系数较小的路面上时,由于抓地力较小,此时油门过大,会造成轮胎打滑,导致无法提供足够的侧向力,车辆失控。如果车辆配置TCS功能,系统会评估摩擦力情况,通过施加制动控制牵引力,使整车牵引力与地面摩擦力达到平衡,无论如何踩油门,车辆的牵引力最大也就是地面提供的摩擦力,这样车辆就不会出现轮胎打滑失控的现象了
EBD电子制动力分配
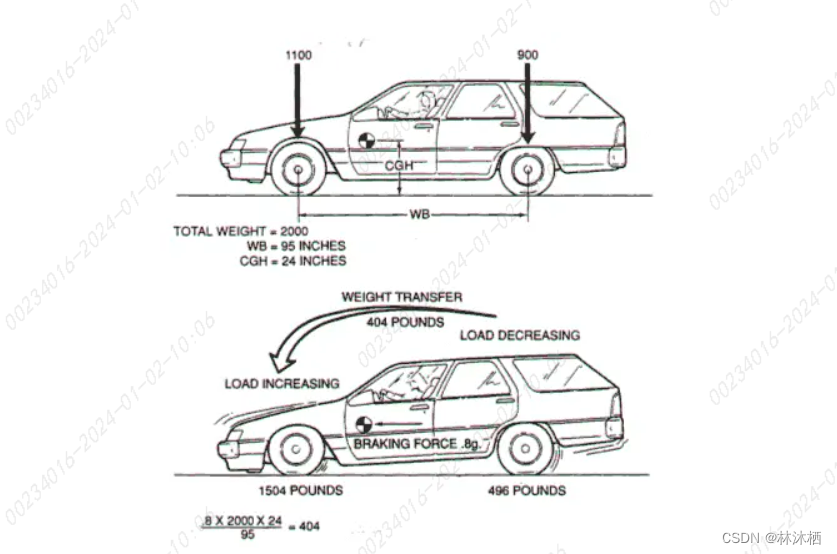
如上图所示,车辆在制动时,会发生一定程度的载荷转移,致使后轮抓地力不足,容易抱死,出现甩尾现象;如果车辆配备EBD功能,当车辆进行制动时,系统会评估前后两轮的抓地力,将制动力适当的分配给前后轮,以达到最佳的制动效果,表现出来就是刹车距离变短;此外EBD也支持左右轮的制动力分配。
HHC坡道保持控制

如上图所示,在上坡等待过程中,若驾驶员松开制动踏板,该系统会通过施加制动压力自动保持车辆稳定2秒,保证车辆不溜坡,一旦驾驶员的油门踩到可以驱动车辆的程度,制动压力立即解除。
HDC陡坡缓降控制

如上图所示,在下坡过程中,HDC功能可以让将车辆速度控制在较低的车速,并维持轮胎的抓地力,让汽车能够安全地行驶到坡下平坦路面。当陡坡缓降功能设定后,驾驶者可以放开所有踏板,把注意力放在控制方向盘上。陡坡缓降功能激活后,驾驶员就无需操纵油门和刹车。下坡速度的控制范围为每小时20至30千米,驾驶员可以通过踩油门和踩刹车在范围区间内提高或者降低下坡车速
AutoHold自动驻车

AutoHold也叫自动驻车,其表现为驾驶员深踩制动踏板使车辆静止,松开制动踏板后仍可以保持车辆静止。主要适用于坡道以及平地行车情况,比如行驶在有一定坡度的停车库进出口,以及正常城市路况下的路口跟车等红灯。前者可以保证车辆不溜坡,保证行车安全;后者则可以让等红灯时不用脚一直踩在制动踏板上,缓解驾驶疲劳;其原理是检测驾驶员踩制动超过阈值且车辆处于静止状态,系统会评估坡道及地面情况,自动施加一定的制动力维持车辆静止,当驾驶员踩油门驶离时,此制动力会撤销。一般车辆保压的最大时长是10min,超过这个时间,EPB会拉起,时长太长容易对制动系统造成损伤,EPB拉起后不影响驾驶员起步操作,驾驶员踩油门,EPB会自动释放掉
CDP动态驻车制动

IPB系统集成了电子驻车EPB(Electric Parking Brake)。EPB系统除了提供车辆静止时的驻车功能外,还作为制动失效下的备用制动系统。在车辆行驶过程中,当EPB开关被驾驶员拉起时,CDP将会持续提供制动减速度直至车辆进入静止状态。CDP可以提供最大至8m/s2的减速度直至车辆静止或者EPB电子按钮被松开。CDP作用期间,车辆的稳定性功能ABS和VDC应处于完全可用状态,避免车轮抱死引起车辆失控
ABP制动预填充

制动预填充的目的是实现更快的制动反应。其原理是当检测到碰撞风险时,IPB会提前施加一定制动力来减小制动片和制动盘之间的间隙,这样在紧急制动时,驾驶员在踩制动时,制动片与制动盘可以直接接触,减少了从驾驶员开始制动到制动盘与制动片接触所花费的制动响应时间,缩短了制动距离。不过此功能并非独立工作,需要通过碰撞风险TTC去触发,属于AEB的子功能
AWB短促制动
AWB报警的目的是通过短促制动来提醒驾驶员即将发生碰撞。短促制动的强度和持续时间由制动系统进行控制。如果在短促制动过程中,需要进行更高优先级的制动(如ESP,ABS制动),该功能将退出。AWB短促制动在激活时根据自车车速判断,请求 ESP不同的制动报警(AWB)等级(车速越高制动时间越长):
• Level 1: 8.3-15.27m/s,减速度为-6 m/s²(可标定),制动时间为 0.2s(可标定);• Level 2: 15.27-25m/s,减速度为-6 m/s²(可标定),制动时间为 0.24s(可标定);• Level 3:25-41.66m/s,减速度为-6 m/s²(可标定),制动时间为 0.3s(可标定);与ABP一样,此功能需要通过碰撞风险TTC去触发,属于FCW/AEB的子功能
HBA液压制动辅助
液压制动辅助HBA在驾驶员触发紧急制动时,可以减小驾驶员制动所需踏板行程,提供最佳的短距离制动以避免危险。其原理是HBA监测制动踏板信号来检测驾驶员进行紧急制动的意愿,当达到HBA的触发阈值时,制动系统将会迅速增压,帮助驾驶员更快刹停。其中HBA的触发阈值不是固定的,而是受碰撞风险TTC的影响,碰撞风险越高,越容易触发;
HBA的默认风险等级为 Level 0,触发阈值为HBA0【此值为标定量】;当Danger Level 1 时为 Level 1, HBA1=HBA0* 0.7当Danger Level 2 时为 Level 2, HBA2=HBA0* 0.5当Danger Level 3 时为 Level 3,HBA3=HBA0* 0.3
可以看出风险等级越高,触发阈值越低,越容易触发
除以上功能外,IPB还配有附属传感器,如轮速传感器、制动踏板行程传感器等,可以监控轮端脉冲、轮端转速、轮端线速度、四轮行驶方向、整车车速、制动踏板行程等信息;
IPB外部接口
IPB作为整车的制动控制系统,在整车系统中,还提供外部接口供上位机控制,接口包括:力矩接口、减速度接口,可根据需要选择合适接口进行开发。
- 下一篇:RAM皮卡:纯电增程两条腿走路
- 上一篇:电动汽车分类及其技术特点解析



编辑推荐




最新资讯
-
直播 | 2025亚马逊云科技汽车行业峰会!探
2025-04-17 10:01
-
从“智驾画饼”到“技术上桌”,智驾进入“
2025-04-17 10:00
-
数据定义场景 场景驱动开发!揭秘车辆能量
2025-04-17 08:17
-
L2 法规最新动向:从国内监管到欧盟 DCAS 0
2025-04-17 08:14
-
GRAS上海办公室喜迁新址
2025-04-17 08:13
