




 广告
广告





















































高性能汽车空气动力学数值模拟与实验的集成工作流程

摘 要
高性能车辆领域和赛车运动领域正在不断推动车辆空气动力学的发展。将数值模拟工具与风洞实验有效的结合对经济高效的空气动力学研究和开发过程至关重要。因此,因此,本研究评估了四个雷诺平均Navier-Stokes(RANS)湍流模型与实验结果的仿真性能,以及用于DrivAer模型(DrivAer hp-F)高性能变体气动评估的高保真延迟分离涡模拟(delayed detached eddy simulation,DDES)数据。研究了关键风洞条件对车辆气动力系数和流场的影响。此外,介绍了一种新的基于CFD的堵塞校正方法,并将其应用于评估传统的堵塞校正方法的准确性。在RANS模型中,k-ω SST模型在预测力系数方面表现出显著的相对精度,并且通常与DDES流场数据保持了最高的相关性。风洞阻塞效应导致下压力增加9%,阻力增加16%,而来自顶置测量系统的干扰效应使下压力减少4%,阻力减少8%。新的基于CFD的堵塞修正方法证实了虽然传统的堵塞修正方法能够充分估计风洞模型附近的动压,但没有单独考虑对下压力和阻力的局部影响。总的来说,这项研究超越了先前在汽车领域的研究,有助于推进高性能车辆复杂流场的空气动力学研究。
01 前 言
赛车运动的竞争性营造了一个鼓励新技术快速发展的环境。赛车运动是创新的前沿阵地,包括汽车制造业在内的很多行业,都接受了赛车领域的技术下放。赛车运动和汽车行业研发的中心课题之一就是部署更高效的空气动力学设计,以优化车辆性能和能源效率。这些设计日益复杂,需要结合使用计算流体动力学(CFD)模拟和风洞实验。然而,该行业的高度竞争性限制了高性能车辆空气动力学实验开发工作流程和实验结果的资源共享。
空气动力学发展过程中,理想的数值工具应能以最少的计算时间提供一致和稳健的结果,同时达到足够的绝对精度。湍流模型的选择对精确度和计算时间之间的权衡有很大影响。雷诺平均Navier-Stokes(RANS)湍流模型因为有良好的计算效率和准确度,在赛车运动和汽车工业中有着广泛的应用。RANS模型在预测汽车阻力方面显示出足够的精度,但通常难以捕捉非定常流动行为,尺度分辨模拟(Scale-resolving simulations,SRS)已被证明可以更详细地捕捉汽车上的流场,特别是在尾流这样的大流动分离区域。然而,SRS方法需要大量的计算资源,因此通常不能满足快速发展部门的成本和周转时间要求。
在空气动力学的研究和发展中,CFD模拟和风洞实验之间的关联协同也是一个至关重要的过程。在计算流体动力学模拟中精确地复制风洞几何形状通常是不可行的。因此,大多数CFD模拟都是在代表开放道路条件的大区域上进行的。然而,风洞测量受到实验装置的影响,因此在简化的开放道路条件下,可能会与CFD模拟产生很大差异。主要考虑的风洞条件是阻塞效应和干扰效应。试验段壁限制了模型周围的气流位移,从而在模型附近产生更高的流速。与飞车辆模型和测量系统等固体元件相关的阻塞效应称为固体阻塞,而由车辆尾流位移引起的效应称为尾流阻塞。各种堵塞校正方法使用几何关系来弥补堵塞对实验力系数数据的影响,除了阻塞效应之外,测量系统的气流阻塞还会产生干扰效应,从而影响车辆空气动力学性能的测量。
已发表的关于湍流模型评估的工作主要针对乘用车。由于升力不是大多数乘用车研究的主要性能参数,乘用车研究通常只考虑阻力预测的准确性。然而,高性能车辆配备了积极的空气动力学装置,产生大量的下压力(负升力),这是此类车辆的主要性能指标。它们的流场表现出更复杂的流动现象,如陡峭的逆压梯度、大的流动分离和强涡流,这些都需要准确捕捉,以评估车辆的空气动力学性能。因此,湍流模型在乘用车应用中的适用性研究结果不能直接应用于高性能车辆。以前关于风洞条件和堵塞修正方法的工作往往只考虑对客车和卡车的阻力预测的影响。这些研究的结果通常没有报告阻塞效应和阻塞校正方法的准确性对下压力的影响,因此也不能直接应用于高性能车辆。车辆的整体空气动力学性能取决于这些装置的单独性能,对测量系统干扰效应的研究通常考虑了对两个力系数的影响,并报告了不同的干扰幅度,取决于下游部件的功能和流量灵敏度。 高性能车辆配备有产生下压力的空气动力学装置,这些装置通常对迎面而来的气流条件高度敏感。因此,高性能车辆比乘用车更容易受到干扰。
本文对四种RANS湍流模型在高性能车辆气动模拟中的适用性进行了评价。以流场的实验力系数和高保真SRS结果作为参考数据,提供了一个全面的对比分析。此外,建立了风洞阻塞和干扰效应的数值表示,以研究它们对高性能车辆流场和气动性能的影响。堵塞效应的数值表示也被用来评估各种堵塞校正方法的准确性,包括新引入的CFD方法。通过这些手段,本文旨在提供详细的见解的流场和高性能车辆的气动性能。此外,本文旨在更好地理解风洞实验和CFD模拟之间的关键差异,以支持高性能车辆空气动力学的工业和学术研究的数值和实验相结合的工作流程。
02 研究方法
车辆模型
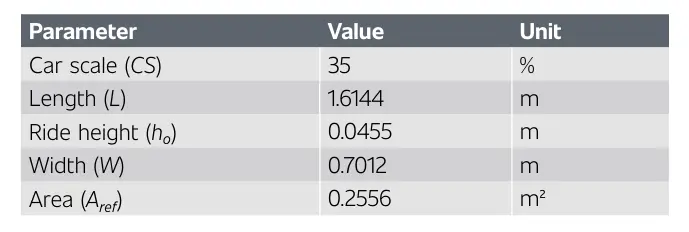
在汽车行业中,乘用车的空气动力学研究通常是在参考车型(如DrivAer)上进行的。本研究使用DrivAer hp-F参考模型,这是DrivAer Fastback模型的高性能变体(图1)。DrivAer hp-F模型是一个35%比例的模型,它包括一个光滑的车身底部,侧镜和封闭的轮腔。它配备了额外的空气动力学装置,包括前保险杠分配器,前体列板,后扰流板,和一个底部扩散。车辆模型的主要参数尺寸如表1所示。

图1 DrivAer hp-F model
表1 DrivAer hp-F模型的参数尺寸。
实验数据
Renan等人在克兰菲尔德大学的8×6风洞中对DrivAer hp-F模型进行的风洞实验被用作本文的实验参考数据。试验场地是一个改造后的试验段包括一个移动地面和两级边界层抽吸系统。在八个不同的车辆重心高度下以40 m/s的速度测量气动力,使用最大全尺寸测量不确定度为±0.90 N(升力)和±0.18 N(阻力)的高架天平。
计算区域
在整个研究过程中,在三个不同的计算域上进行了数值模拟。创建计算风洞区域,以改善与实验数据的相关性,并对两个开放道路计算区域进行建模,以研究风洞条件对车辆流场的影响。在直线行驶的条件下,在一个对称的汽车上的流动模式可以被假定为对称的。因此,本研究使用半车的情况下,它可以减少网格尺寸超过40%,而提供小于1%的空气动力学系数的变化。对称条件的使用得到了多通道扩散器实验的支持,例如DrivAer hp-F模型的实验,该实验已表明可以消除平面扩散器中在非常低的车辆重心高度下观察到的不对称流动条件。另一方面,DDES模拟中的解析非定常湍流不会立即遵守对称性,因此,时间相关行为可能会受到对称性简化的影响。然而,本研究仅使用来自DDES模拟的时间平均流量,其受沿着对称平面的小湍流波动的影响最小。因此,对称性简化是本研究的一种具有成本效益的方法,并允许从分析中进行定性学习。
风洞区域(图2)(WT installation)被模拟为没有收缩段和扩压器段的直风洞。半域具有1787 mm的横截面高度和1219 mm的宽度,包括431.05 mm长的拐角圆角。根据汽车外部空气动力学的最佳实践,速度入口位于车辆模型前面3倍车长处,压力出口位于车辆模型后面5倍车长处。该区域尺寸允许在车辆模型前方有足够的空间来发展气流的湍流特性,并避免外流条件影响车辆的尾流。数值风洞区域的顶壁和侧壁被模拟为无滑移固定壁,以允许其上的边界层增长。在实验中使用的移动地面系统被建模为一个无滑移的平移移动墙。此外,模拟是在移动壁和U∞ = 40 m/s的入口速度下进行的,空气特性列于表2中。
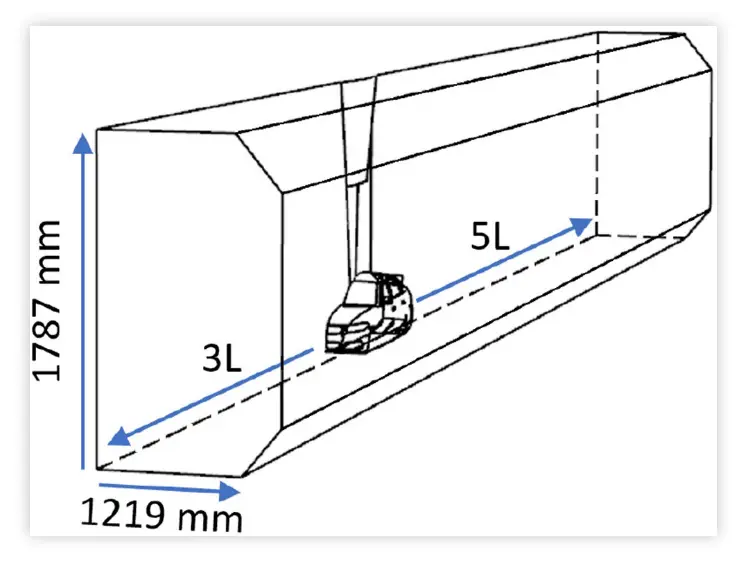
图2 WT装置:在风洞计算域中安装带有顶部支柱的车辆模型。
表2 风洞空气特性
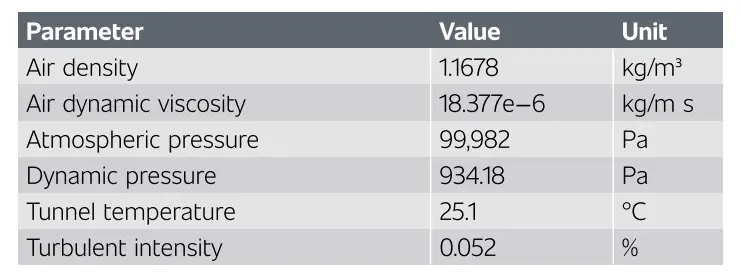
开放式道路设施将创建两个开放式道路设施,这两个设施使用相同的计算域,但模型配置不同。同样,根据汽车外部空气动力学的最佳实践,速度入口位于车辆模型前面3倍车长,压力出口位于车辆模型后面5倍车长。顶壁和侧壁位于距离车辆模型1.5倍车长的位置,与风洞中的约1.3%相比,阻塞率要小得多。为了模拟开放道路条件,顶壁和侧壁被建模为对称壁,以防止边界层在其上生长。移动地面和入口速度与U∞ = 40 m/s的实验风速相匹配,并且风洞和开放道路区域之间的空气特性保持恒定,以便进行一致的相对比较(表2)。第一个开放道路安装被称为带顶置支柱安装(wTS installation),由包括定置测量系统的车辆组成[图3(a)]。第二个开放道路安装称为无顶置支柱安装(woTS installation),由无顶置测量系统的车辆组成[图3(B)]
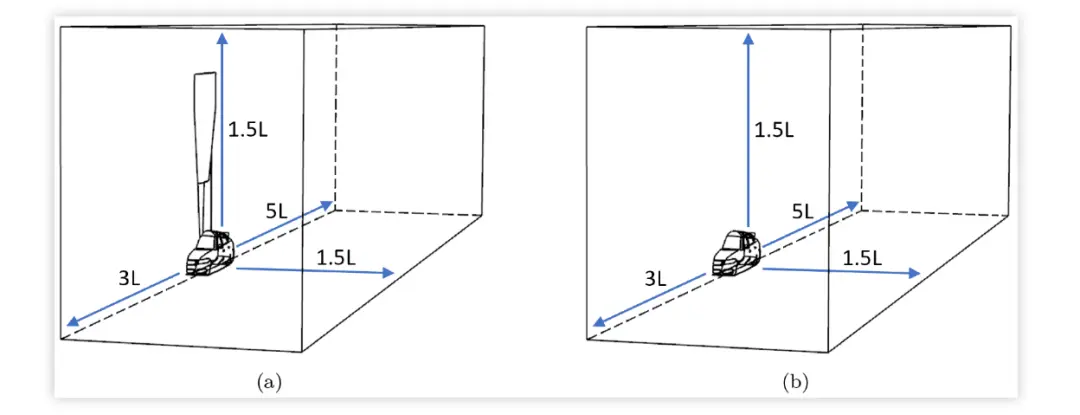
图3(a) wTS装置:开放道路计算域内带顶杆的车辆模型;(b) wTS装置:开放道路计算域内不带顶杆的车辆模型。
网格划分
在ANSYS Fluent Meshing中为每个模型创建非结构化poly-hexcore网格。与传统的六角网格技术相比,poly-hexcore网格技术可将总网格尺寸减少约40%,并将标准DrivAer模型模拟的求解时间减少约14%。基本网格尺寸和车辆网格尺寸分别为汽车长度的7.25%和0.45%。此外,车辆上的面网格尺寸被局部减小,以充分捕获空气动力学附加装置和小特征的复杂几何形状。第一层网格厚度也是局部控制的,目的是使y+≈30-300,以捕获湍流边界层。最后,创建了体网格细化区域,以提供车辆流场的更多细节(图4)。
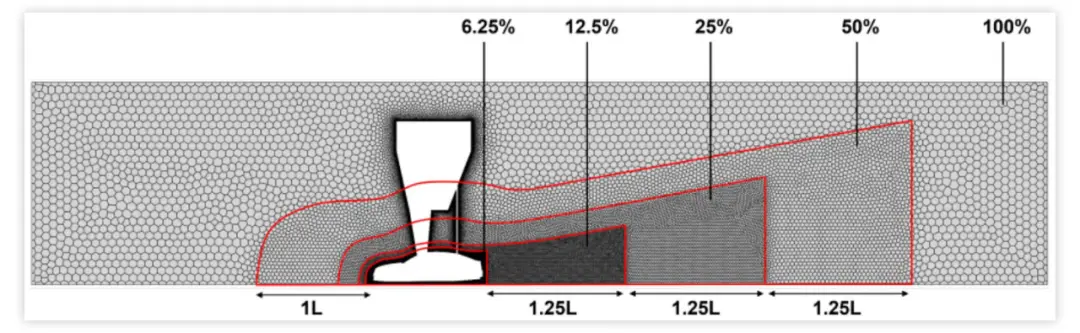
图4 wTS装置在对称平面上的中网格的侧视图,突出显示了细化区域
表3 网格参数
用网格收敛指数(GCI)进行网格收敛研究。采用非结构化网格的系统细化方法,创建了两个不同网格细化水平的额外网格(表3)。该方法建议基于平均单元尺寸h (mm)使用大于1.3的细化因子r(-)。采用ANSYS Fluent中标准设置的k-ω SST湍流模型,在两台共64核的AMD EPYC 7543 cpu上进行网格收敛研究的仿真。采用非结构化网格方法也证明了数值解对进一步网格细化的敏感性。该方法利用数值解对渐近解的偏差,而渐进解是通过Richardson外推估计的。尽管与GCI对于非结构化网格的运用少于结构化网格,但它提供了比简单报告错误更全面的见解,并且已被证明在汽车空气动力学的类似案例中是成功的‘表4 网格收敛研究结果。
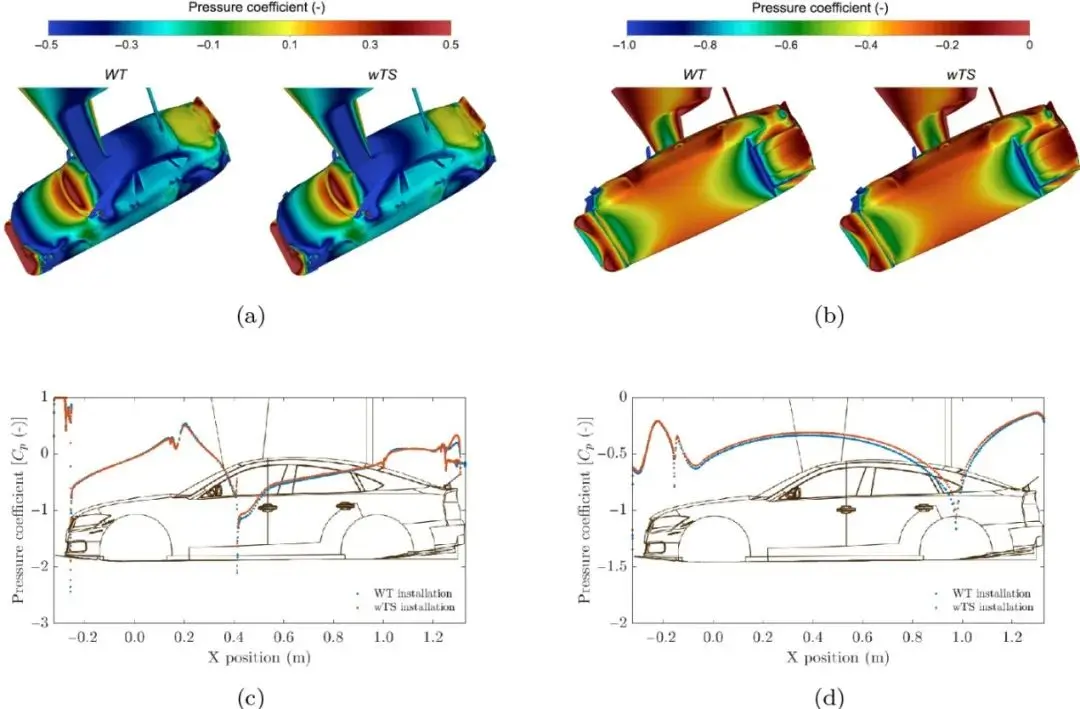
表4的收敛研究结果显示了细、中网格(![]() )的GCI值,两种力系数的GCI值都远小于中、粗网格(
)的GCI值,两种力系数的GCI值都远小于中、粗网格(![]() )。这表明增加的细化级别减少了对网格的依赖。Roache报道了具有非整数精细化比率的非结构化网格可以导致高于平均数量级的精度,这取决于关键区域的精细化水平。在driver hp-F模型中,升力主要由表面压力分布决定,而阻力主要由车辆尾迹中的压力阻力决定。因此,在这些关键区域具有不等细化的非结构化网格划分方法会导致两个力系数之间的网格收敛率发生变化。尽管如此,渐近范围条件
)。这表明增加的细化级别减少了对网格的依赖。Roache报道了具有非整数精细化比率的非结构化网格可以导致高于平均数量级的精度,这取决于关键区域的精细化水平。在driver hp-F模型中,升力主要由表面压力分布决定,而阻力主要由车辆尾迹中的压力阻力决定。因此,在这些关键区域具有不等细化的非结构化网格划分方法会导致两个力系数之间的网格收敛率发生变化。尽管如此,渐近范围条件![]() 为两个力系数提供了近似为1的值。这表明两个解都在各自的渐近范围内。考虑到网格依赖程度、计算时间和升力将作为本研究的主要性能指标,所有RANS模拟均采用中网格策略。该网格显示出相对于Richardson外推渐近值的相对误差,升力为0.38%,阻力为8.40%。
为两个力系数提供了近似为1的值。这表明两个解都在各自的渐近范围内。考虑到网格依赖程度、计算时间和升力将作为本研究的主要性能指标,所有RANS模拟均采用中网格策略。该网格显示出相对于Richardson外推渐近值的相对误差,升力为0.38%,阻力为8.40%。
采用上述网格策略为计算风洞域(WT)的DDES模拟创建高近壁分辨率网格。高近壁分辨率网格采用低y+处理,y+≈0.7,有15层边界层。此外,通过将汽车周围细化区的元素大小从6.25%减少到2%,可以实现近壁区域小元素的更平滑过渡(图4)。因此,在WT装置上用于DDES模拟的高近壁分辨率网格包含约2200万个单元,而在WT装置上用于RANS模拟的网格仅包含约600万个单元。
湍流模型
根据ANSYS Fluent中的标准设置,使用Spalart-Allmaras、k- λ realizable、k-ω SST和Reynolds应力湍流模型进行稳态模拟。每个RANS模拟进行了1000次迭代,并对最后500次迭代的力系数进行了平均。RANS模拟在两个AMD EPYC 7543 cpu上运行,共使用64个内核,结果表明,Spalart-Allmaras模型的平均计算时间约为1小时,k- λ realizable和k-ω SST模型的平均计算时间为1.2小时,Reynolds应力模型的平均计算时间为1.58小时。
采用DDES模型,以ANSYS Fluent中的标准设置和k-ω SST RANS背景模型对WT安装进行SRS仿真,作为数值参考数据。DDES模拟采用k-ω SST模型在相同的高近壁分辨率网格上的RANS模拟进行初始化。DDES模拟的时间步长基于Aultman等人提出的方法。该方法定义了最小的无维时间步长为1χ,类似于平均科朗数约为1的特定情况。Aultman等人指出,随着时间步长的增加,小尺度湍流结构逐渐混合到大尺度结构中。随着时间步长的增加,在湍流结构中获得足够的保真度。为了在湍流结构中获得足够的保真度,本研究中使用了保守的时间步长t = 3.125·10−4 s (5χ), 10次内迭代。每个DDES模拟执行了总共2秒或49.6对流时间单位(ctu)的流动时间。前1秒(24.8 CTUs)用于清洗初始RANS条件,达到统计收敛,剩余1秒(24.8 CTUs)用于平均流场,收集非定常统计。DDES模拟是在四个AMD EPYC 7543 cpu上进行的,总共使用128个内核,每次DDES模拟的平均计算时间约为90小时。
风洞试验
在ANSYS Fluent Meshing中
本文提出了一种逐步的方法来数值研究阻塞和测量干扰效应的影响和意义。风洞实验和CFD模拟是互补的技术,可用于全面了解高性能车辆的空气动力学。虽然风洞中的物理测试对于验证至关重要,但它们也会受到诸如阻塞效应和测量系统干扰等条件的影响。因此,深入了解这些效应对汽车流场的影响和意义,对于改善风洞实验和数值模拟之间的相关过程至关重要。
阻塞效应通过在计算风洞域(WT装置)和开放道路域(wTS装置)上的模拟来创建阻塞效应的数值表示。这两个域都使用包括顶置测量系统的车辆,从而仅在阻塞量方面有所区别。阻塞效应的隔离用于研究汽车流场的局部变化,并量化对气动力的总体影响。
将每种修正方法应用于计算风洞域(WT装置)的模拟结果,并与开放道路域(wTS装置)的模拟结果进行比较。校正方法的复杂性各不相同,其中DNW Maskell和Extended Maskell III方法为基本Maskell方法的校正方法提供增量扩展。而Thom & Herriot和Mercker方法还分别考虑了固体和尾流阻塞。然而,每种校正方法基于测量的力系数和几何关系提供了车辆附近的预估校正动态压力。此外,在公式1中使用了通常在风洞入口处测量的参考动压q(Pa),以计算修正的力系数。这些修正后的力系数是对车辆在开放道路条件下的空气动力学性能的估计,没有风洞壁施加的阻塞效应。

在传统修正方法的基础上,本文提出了一种基于CFD的修正方法。与Maskell方法类似,CFD方法考虑了车辆模型附近的动压升高。然而,动压不是基于几何关系估计的,而是从有代表性的模拟数据中提取的。基于CFD的校正方法使用了来自堵塞效应的数值表示的结果。在这里,计算了风洞区域和开放道路区域中正面上的平均动压(图5)。正面应位于纵向位置,这里受最大的阻塞比,以避免欠校正。此外,在开阔道路区域内,应考虑用黑色边框表示的风洞投影区域内的动压,以防止远场低动压的影响。修正动压qc由风洞区域的结果表示,参考动压q由开放道路区域的结果表示。
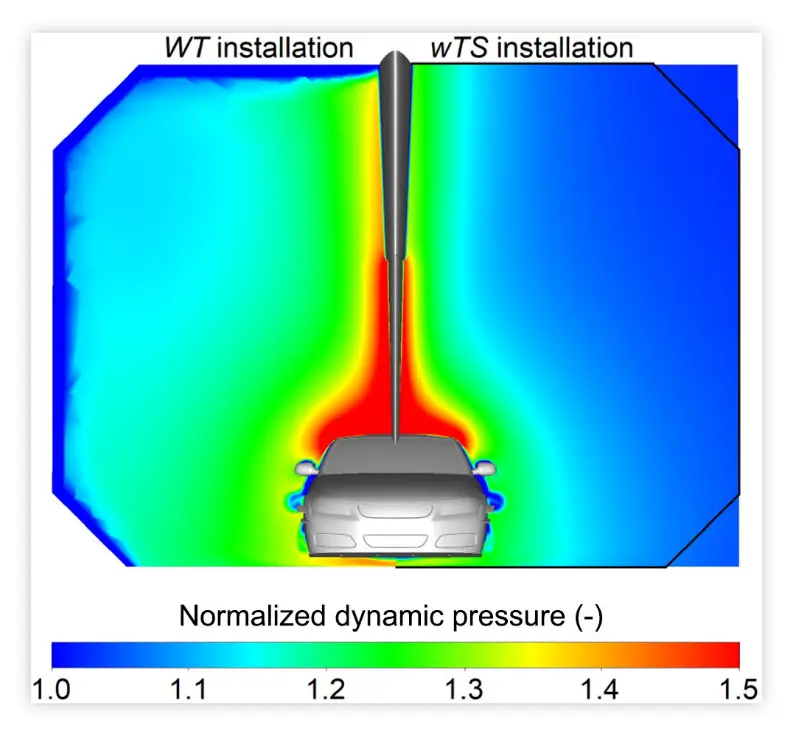
图5 WT和wTS正面横截面(x = 0.45 m)上的动压比较,黑色边框突出显示了积分区域。
通过这些手段,CFD计算提取了车辆模型附近的qc和q,从而仅需考虑阻塞效应造成的动压增加。基于CFD的校正方法的本质是使用车辆模型附近的代表性模拟数据,而不是使用传统的几何关系。由于提供了阻塞效应的数值表示,CFD方法也可以用于评估传统方法的动态压力估计。
风洞实验中测量系统的存在会产生干扰效应,从而影响车辆的空气动力学性能。通过在开放道路域中对具有顶置测量系统(wTS installation)和不具有顶置测量系统(woTS installation)的车辆进行仿真,对顶置测量系统产生的干扰效应进行了数值研究。这些装置不受风洞阻塞效应的影响,仅在车辆模型配置方面有所区别。通过这些手段,由顶置测量系统施加的影响可被隔离。
03 结果和讨论
高性能车辆的空气动力学性能通常对车辆重心等操作条件高度敏感。前文使用实验得出的力系数数据讨论了这种车辆重心高度灵敏度。此外,通过与实验数据的相对比较和与高保真DDES流场数据的绝对比较,评估了4种实际RANS湍流模型的预测能力。以下小节概述了高性能车辆的风洞实验和开放道路模拟之间的主要差异来源。本文讨论了阻塞效应的数值量化、修正方法的适用性评估和测量系统干扰效应的研究过程,并将其应用于克兰菲尔德大学8×6风洞中的DrivAer hp-F实验装置。
湍流模型的评价
值得注意的是,由于数值近似值、几何变异性和测量不确定性等因素,必须预测CFD和风洞结果之间的差异。然而,通过仔细考虑这些因素,这两种技术可以作为气动研究的互补方法。因此,本文使用实验数据来研究气动性能趋势,因此,本文使用实验数据来研究气动性能趋势,而高保真DDES结果作为计算风洞域中绝对量的最佳可行近似。此外,高性能车辆的风洞数据极为稀缺,可供driver hp-F模型使用的数据集仅限于力系数数据。因此,高保真DDES结果也作为一种补充方法,用于更详细地分析driver hp-F模型的流场。在相同的计算风洞域中,通过对实验力系数数据的相对精度和对DDES流场数据的绝对精度来评估各种RANS模型对高性能车辆空气动力学的预测能力。
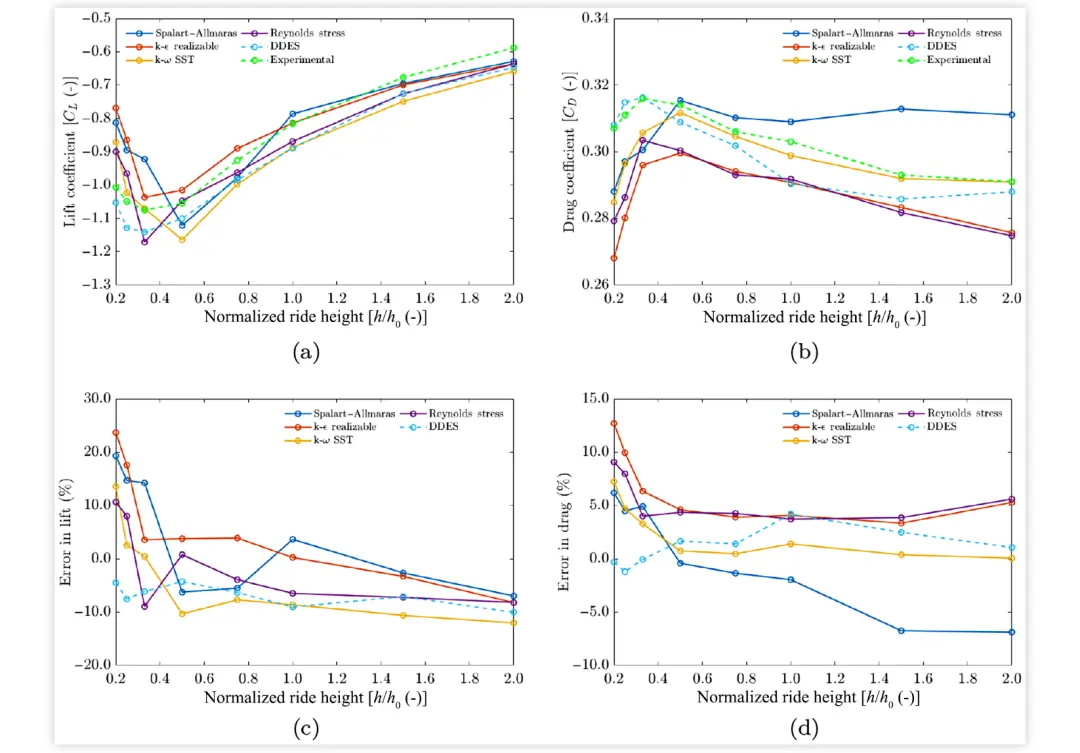
图6 (a)风洞试验和WT装置数值模拟的升力和(B)阻力系数,以及风洞试验和WT装置数值模拟之间的(c)升力和(d)阻力误差。
图6描述了车辆的升力和阻力系数与车辆重心高度的关系,其中h0表示45.5 mm的标准化车辆重心高度。实验数据显示了在![]() 范围内的力增强区域,由于车辆下方的气流加速更强,下压力随着车辆重心高度的降低而增加。由于下压力的增加,在沿着
范围内的力增强区域,由于车辆下方的气流加速更强,下压力随着车辆重心高度的降低而增加。由于下压力的增加,在沿着![]() 范围内也会产生更多的诱导阻力。在临界车辆重心高度
范围内也会产生更多的诱导阻力。在临界车辆重心高度![]() 以下观察到显著的下压力损失和阻力急剧下降。在如此低的车辆重心高度下,车辆下方的气流变得越来越不稳定,这会对空气动力学性能产生负面影响。
以下观察到显著的下压力损失和阻力急剧下降。在如此低的车辆重心高度下,车辆下方的气流变得越来越不稳定,这会对空气动力学性能产生负面影响。
DDES模型与实验数据具有良好的相关性。它平均高估7%的下压力,低估2%的阻力。此外,DDES的结果是高度一致的,从相对不变的误差可以看出,在整个车辆重心高度范围内,其标准偏差约为2%。然而,根据下压力和诱导阻力之间的相互关系,预计阻力会适度高估。这种相互关系可能受到差异源和湍流模型精度对每个单独力系数的不同影响的影响。例如,下压力主要由车辆近壁面流动决定,而阻力主要由车辆湍流尾迹中的非定常流决定。总体而言,DDES模型已经证明了其在整个车辆重心高度范围内始终如一地再现两种实验力系数趋势的能力。这为其充分捕获详细流场数据的能力提供了信心。因此,车辆流场的DDES结果将被用作数值参考数据,以进一步评估WT装置中RANS模型的准确性。
RANS湍流模型所应用的时均方法的一个共同局限性是其固有的无法准确预测高度非定常流动条件。这种限制在图6中也很明显,其中每个RANS模型都无法充分预测车辆在![]() 的低车辆重心高度下的空气动力学性能。因此,该评估侧重于高至中等车辆重心高度范围(
的低车辆重心高度下的空气动力学性能。因此,该评估侧重于高至中等车辆重心高度范围(![]() ),在这个范围内,气动性能可以不由高度不稳定的流动行为决定的。每个RANS模型捕获了2h0 ~ 0.5h0范围内的下压力增强区域。与DDES结果相比,Spalart - Allmaras、k- λ realizable和Reynolds应力模型分别低估了约4%、8%和2%的下压力,而k-ω SST模型高估了约2%的下压力[图6(a)]。与实验数据相比,k-ω SST模型在整个车辆重心高度范围内提供了最一致的下压力预测,其下压力误差的相对偏差小于2%[图6(c)]。其他RANS模型提供的下压力预测不太一致,其下压力误差相对偏差约为4-5%。
),在这个范围内,气动性能可以不由高度不稳定的流动行为决定的。每个RANS模型捕获了2h0 ~ 0.5h0范围内的下压力增强区域。与DDES结果相比,Spalart - Allmaras、k- λ realizable和Reynolds应力模型分别低估了约4%、8%和2%的下压力,而k-ω SST模型高估了约2%的下压力[图6(a)]。与实验数据相比,k-ω SST模型在整个车辆重心高度范围内提供了最一致的下压力预测,其下压力误差的相对偏差小于2%[图6(c)]。其他RANS模型提供的下压力预测不太一致,其下压力误差相对偏差约为4-5%。
考虑到阻力,与DDES结果相比,k- λ realizable和Reynolds应力模型平均低估了约2%,而k-ω SST模型高估了约2%的阻力[图6(b)]。这三种RANS模型在考虑的车辆重心高度范围内提供一致的阻力预测,其阻力误差的相对偏差小于1%[图6(d)]。相反,Spalart-Allmaras模型未能充分捕获阻力,因为它描述了在![]() 的车辆重心高度范围内几乎不敏感的阻力趋势,这可能是由于模型无法准确预测自由流湍流的衰减。
的车辆重心高度范围内几乎不敏感的阻力趋势,这可能是由于模型无法准确预测自由流湍流的衰减。
沿上表面的压力分布如图7所示。在这里,当气流在车头处转向时,车头的高压区域后部出现低压区域。沿着发动机罩,压力在前挡风玻璃前恢复,又形成了一个高压区域。气流在车顶上空再次加速,形成一个低压区,并逐渐向车顶后缘恢复。由于顶部后面的流动分离,在斜面上可以看到中等压力。最后,当气流与扰流板相互作用时,又会形成一个高压区域。
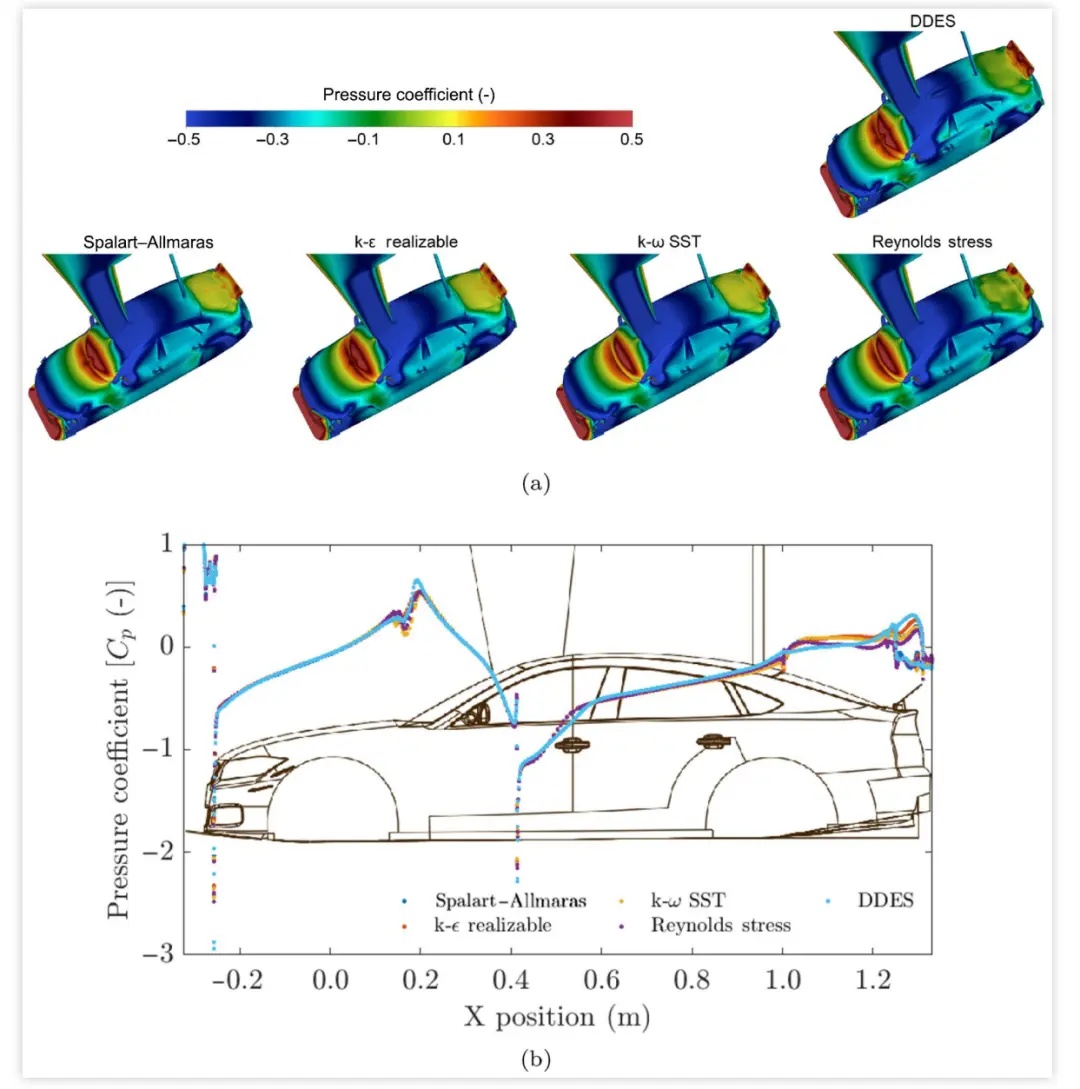
图7 (a)上表面的压力系数等值线图和(b)![]() 时WT装置上表面接近对称线(y = −50 mm)上的压力系数分布。
时WT装置上表面接近对称线(y = −50 mm)上的压力系数分布。
在上表面上,RANS模型与DDES结果基本吻合。k-ω SST和Reynolds应力模型提供的上表面压力在DDES预测的1%以内。k - ϵ realizable 模型和Spalart-Allmaras模型的结果表明,该区域与DDES结果的差异约为2%和4%。在发动机罩的下游,RANS模型通常表明在挡风玻璃前会形成一个较大的再循环区。因此,与DDES结果相比,气流被重定向到更高的挡风玻璃上。因此,对于RANS模型,在挡风玻璃局部观察到的压力峰值小18%。着顶板,RANS模型显示了一个不波动的的初始压力的恢复。这导致朝向车顶后缘的产生了约10%的较大差异。在更下游的后风窗斜面处,RANS模型忽视了分离的产生,从而影响了扰流板上的压力分布。在这里,DDES模型在扰流板上描绘了更明显的高压浓度,与RANS模型相比,它可以在局部达到约50%的峰值压力。
下压力主要是由车辆下方的气流产生的,因此应该准确地捕捉。图8描述了沿着车身底部的压力分布。这里,在分流器下方观察到初始低压平台,随后是陡峭的压力恢复。这表明存在分离气泡和随后的流动再附着点。当气流在地板之间加速时,在地板前缘和地面之间产生了一个小的压力下降。气流通过扩散器入口被抽走,造成压力的大幅度下降。在这种下降之后,随着气流逐渐减慢,整个扩散器的压力会恢复。此外,由于侧板处强涡的形成,在每个扩散器通道的两侧存在低压浓度。这些涡旋诱导相对高能量的气流进入扩压坡道,从而支持下压力的产生。
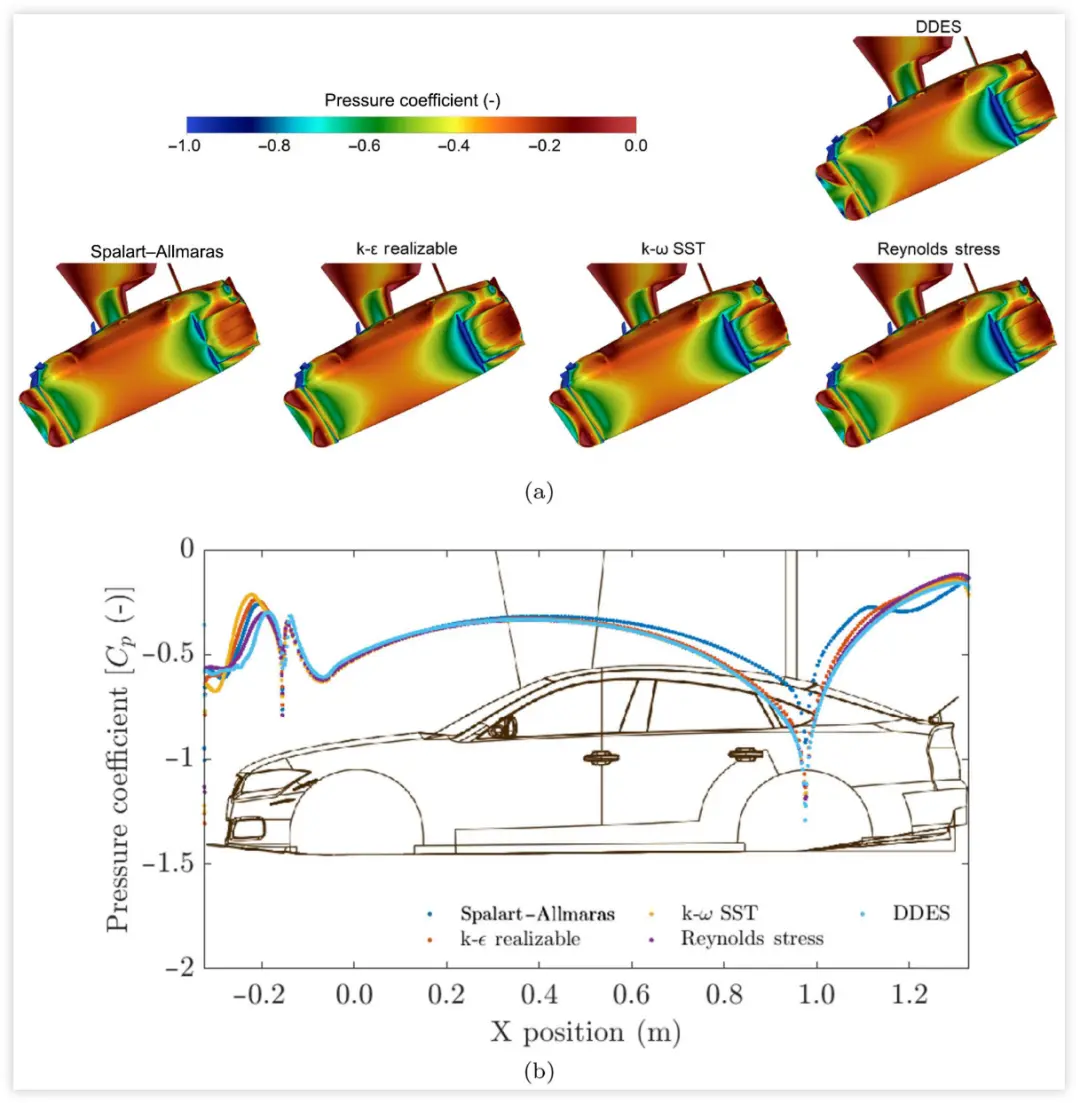
图8 (a)车身底部表面的压力系数等值线图,以及(b)WT装置中![]() 时车身底部表面接近对称线(y=−50 mm)上的压力系数分布。
时车身底部表面接近对称线(y=−50 mm)上的压力系数分布。
虽然RANS模型可以充分捕捉到底体的总体压力分布,但在分流器、扩散器入口和扩散器坡道周围可以看到局部差异。与DDES模型相比,RANS模型预测分离器下方的分离气泡更小,流动再附着时间更早。k-ω SST模型预测了最小的分离泡,导致再附着长度缩短15%。雷诺兹应力模型估计了RANS模型中最大的分离泡,但仍然低估了约5%的再附着长度。尽管沿分离器方向存在差异,但每个RANS模型都能提供准确的压力预测,其范围不超过DDES数据的4%,包括吸力峰值和底板前缘后的初始压力恢复。对于底板的后半部分,k-ω SST和Reynolds应力模型表现特别好,压力估计在DDES结果的1%以内。k - λ realizable模型仍然在该区域提供了4%以内的误差,而Spalart - Allmaras模型低估了约20%的吸力。沿这段地板和扩散器入口的压力主要受扩散器膨胀产生的抽吸效应的影响。Spalart-Allmaras是唯一一个在扩散器斜坡上显示较大压力波动的模型。这表明存在分离气泡,导致上述地板吸力下降。其他的RANS模型与DDES模型在扩散器斜坡上的结果一致。在这里,压力恢复主要发生在斜坡的中心,低压浓度存在于每个扩散器通道的两侧。尽管如此,k - λ realizable和Reynolds应力模型描述了整个扩压器更陡峭的压力恢复,与DDES结果相比,表面压力高出约20%。k-ω SST模式与该地区的DDES数据最吻合。该模型描述了入口下游几乎相同的压力估计,而扩散器出口的差异保持在10%以内。沿斜面和扰流板的气流主要受沿顶板柱、顶板尾缘和斜面的涡流和气流分离预测的影响。在这里,DDES结果显示气流沿斜面逐渐减速,气流沿斜面中心和侧面移动速度更快[图9(a)]。这些高速气流轨迹是来自顶置测量系统和顶柱的高能涡流的结果。旋涡沿斜面传播,在扰流片上形成高压浓度,在最上游的平面上较小的环形高速气流轨迹表明,RANS模型从顶置测量系统预测的涡流要小得多。
此外,捕捉到的旋涡结构的保真度较低,当旋涡沿下游移动时,两个不同的圆形轨迹混合成一个轨迹。尽管保真度降低了,但k- λrealizable模型预测了沿斜面中心的漩涡轨迹。这可以通过高速气流迹线的高度和扰流板中心的压力浓度来证明(图7)。相反,Spalart-Allmaras、k-ω SST和Reynolds应力模型预测了一个更向上的轨迹,这可以从高速气流迹线到斜面的距离增加中看出。此外,这些模型显示扰流板中心周围的高压浓度降低,甚至没有高压浓度(图7)。除了来自顶置测量系统的涡预测存在差异外,DDES结果还观察到沿车辆车顶线产生的涡更内向的轨迹。这可以从斜面两侧高速气流迹线的更宽跨度和扰流板两侧高压浓度的增大中看出(图7)。
为了研究沿斜面的分离情况,从各模拟中做四分之一斜面宽度处的速度剖面[图9(b)]。在每个模型中观察到边界层在逆压梯度下的速度分布,其中近壁流动减速并开始分离。然而,由于每个模型的逆压梯度敏感性和顶部流量预测的不同,可以观察到速度剖面的差异。DDES结果描述了最上游速度剖面的近壁面流动逆转,这表明气流立即从顶部后缘分离。气流沿斜面进一步减速,在最下游速度剖面上达到自由流速度的25%左右的反转速度。RANS模型最初展示了一个更有活力的边界层,在顶部后面重新附着,在最上游的速度剖面中显示为正速度。尽管RANS模型在随后的速度剖面中描述了明显的边界层减速,但雷诺兹应力模型是唯一的模型,它显示了近壁面流动逆转。在最下游的速度剖面上观察到更好的一致性,其中每个RANS模型都描述了流动分离。与DDES结果相比,k- λ realizable和k-ω SST模型预测的回流速度约为自由流速度的20%,回流高度几乎相同。Spalart-Allmaras和Reynolds应力模型预测的回流速度约为自由流速度的15%,而回流高度低估了约2%。此外,在边界层顶部观测到较高的流向速度。这是由于在斜面上游的边界层动量预测初始增加所致。尽管沿斜面的流量预测存在差异,但driver hp-F模型的性能没有显著变化。这是由于扰流板对总下压力的贡献很小,约为2%,而且其效率对迎面流条件不敏感。
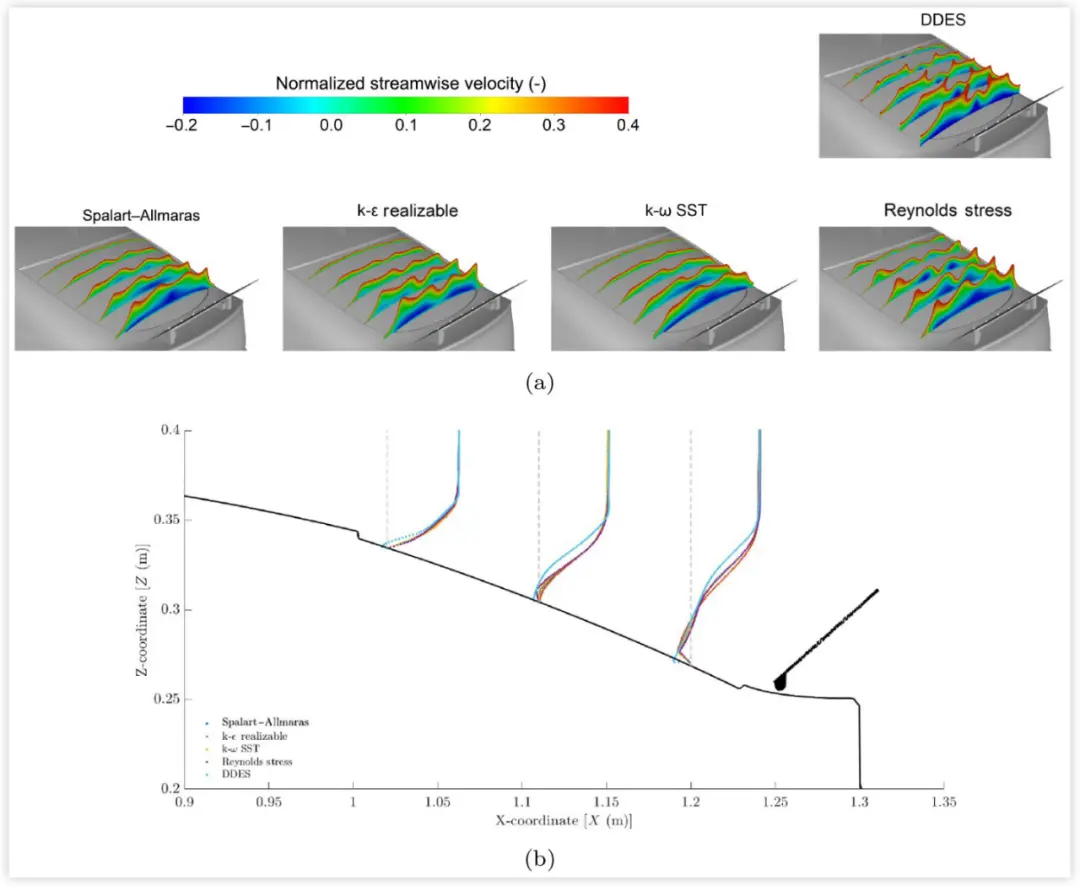
图9 (a)沿着斜面锋面上的标准化流向速度等值线图(x=1.02 m、x=1.065m、x=1.11m、x=1.155m和x=1.2m),以及(B)三个位置的流向速度剖面(x=1.02m、x=1.11m和x=1.2m),在![]() 处WT装置的倾斜纵向线(y=−85mm)上。
处WT装置的倾斜纵向线(y=−85mm)上。
扩散器是高性能车辆上的关键设备,因为它通常产生超过车辆总下压力的三分之一。因此,准确的扩散器流量预测非常重要,尤其是在评估车辆车辆重心高度敏感性时。正如第3.1.2节所讨论的,在扩压器入口处产生了一个很大的压力下降,随后压力沿着发散的扩散器器斜坡逐渐恢复。DDES结果描绘了一个狭窄的零剪应力区域,由一个低剪应力区域包围,朝向扩散器的中部(图10)。如图11所示,低剪应力区域表明这些区域经历了相当大的近壁流动减速甚至分离。在扩散器的对称分离器下方也可以看到中等向流速度的痕迹,这是由该区域的流动分离造成的。此外,由于与自由气流的压力差,在扩压器侧板和分离器处产生涡流。这些涡旋诱导了相对高能的气流从车外流向扩散器坡道。这种现象说明了扩散器通道中的流动附着,表现了这些区域的高剪切应力集中和高近壁流动速度。

图10 WT装置在1h时扩散器的流向剪应力等值线图。
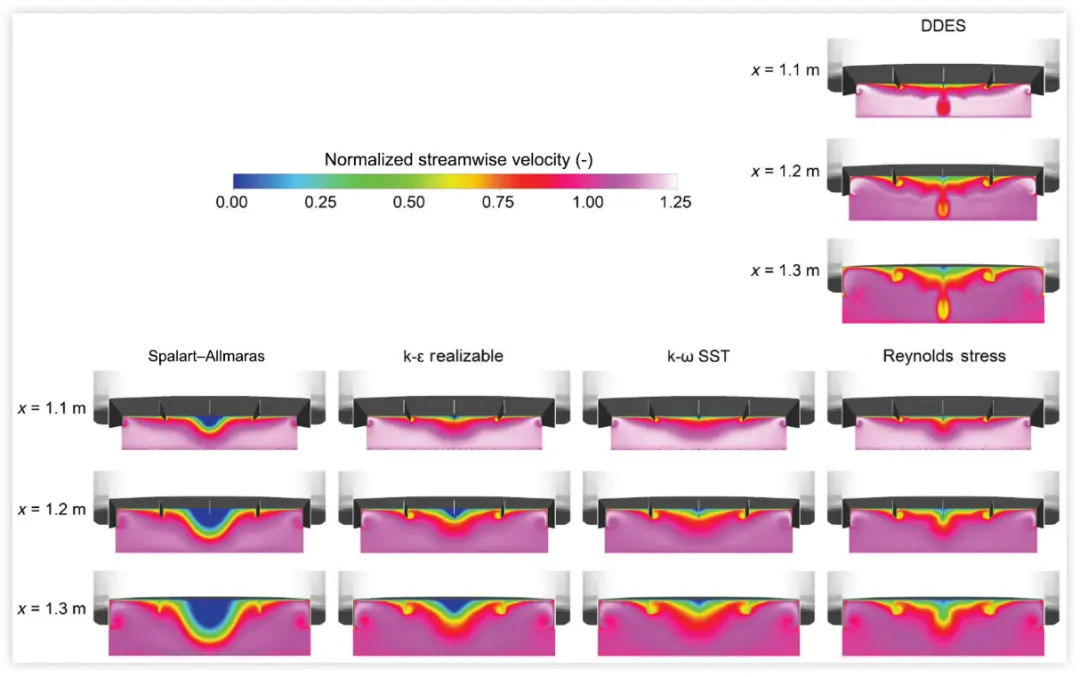
图11![]() 时WT装置中沿扩压器(x=1.1m。x =1.2m和x =1.3m)的正面沿着平面上的标准化流向速度等值线图。
时WT装置中沿扩压器(x=1.1m。x =1.2m和x =1.3m)的正面沿着平面上的标准化流向速度等值线图。
如前所述,Spalart-Allmaras模型明显高估了扩散器中心周围的分离。k- λ realizable模型对该区域流动分离的预测误差稍小,但k-ω SST和Reynolds应力模型更为一致。这些模型描述了一个较窄的低剪切应力区域和沿扩散器中心的减速气流,类似于DDES的结果。然而,没有一个RANS模型捕捉到远离扩散器斜坡的中等流向速度的痕迹。尽管如此,在每个RANS模型中都观察到来自外部通道侧板涡的类似流动现象。k-ω SST模型在分离器处涡的流动现象中显示出最一致的结果,其次是k- λ realizable应力模型和Reynolds应力模型。Spalart - Allmaras模型明显忽视了分离器涡的流动现象,可能受到其显著的流动分离过度预测的影响。总体而言,k-ω SST温度模型与DDES模拟的扩散器流动预测最吻合,因此在DDES结果的3%范围内提供了扩散器下压力预测。其他的RANS模型低估了扩压器的下压力大约8%。
从车身和扰流板分离出来的气流在车辆后方形成了一个能量相对较低的气流尾流,由总压较低的区域表示(图12)。DDES结果显示,在车辆后方有一个压力损失严重的近尾迹区域。在主尾迹区域的顶部可以看到中等的总压痕迹,这是由斜面、扰流板和顶置测量系统的流动分离造成的。此外,在主尾迹区域的外围,还观察到来自镜面和条纹的中等总压尾迹。由于上述流动分离和扩压器内的涡流,在近尾迹的下部区域可以看到较大的压力损失。再往下游,尾迹被一对反向旋转的涡控制,这两个椭圆形的低总压集中表明了这一点。为了研究尾迹的耗散和垂直轨迹,我们确定了每个尾迹平面的面积加权平均总压系数和压力损失加权平均垂直位置(图13)。这些结果表明,尾迹中的压力损失随着车辆后面的距离呈指数衰减,并且由于反向旋转涡对之间的相互作用,尾迹中的压力损失主要是向上的轨迹(图13)。
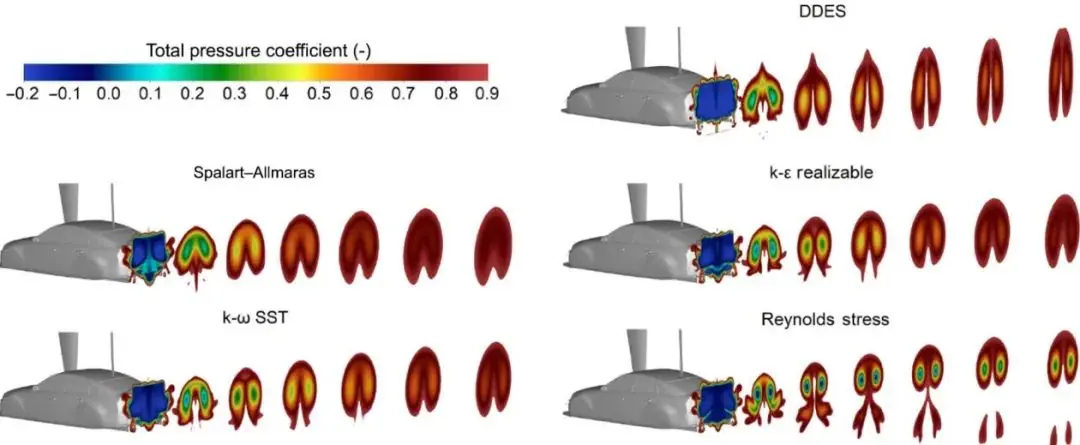
图12![]() 时WT装置中尾流(x=1.35m、x=1.85m、x=2.35m、x=2.85m、x=3.35m、x=3.85m和x=4.35m)垂直面上的总压系数等值线图。
时WT装置中尾流(x=1.35m、x=1.85m、x=2.35m、x=2.85m、x=3.35m、x=3.85m和x=4.35m)垂直面上的总压系数等值线图。

图13 (a)面积加权平均总压系数和(B)总压损失加权平均![]() 时WT装置中汽车尾流的垂直位置
时WT装置中汽车尾流的垂直位置
RANS模型显示了一个具有高压损失的平方近尾流区域,与DDES结果相似。然而,压力损失的强度被低估了,特别是在主尾流区域的顶部。Spalart-Allmaras和k- λ realizable模型展示了近尾迹较低区域的更多压力损失,这是它们对扩散器中流动分离的过度预测的结果。每个RANS模型都充分捕获了扰流板和边条尾迹的位置和强度。然而,来自反光镜的尾迹通常位于更远的位置,捕获强度较低。对于尾流的发展,所有的RANS模型都显示了两个反向旋转涡,但强度和垂直轨迹有所不同(图13)。Spalart-Allmaras和k- λ realizable模型最准确地捕捉了尾流中压力损失的耗散,与DDES结果的平均偏差约为3%。k-ω SST和RANS应力模型表明,在大部分尾迹中,尾迹耗散减少了约7%。尽管在尾迹平面上的面积加权平均总压有足够的一致性,但雷诺应力模型清楚地显示了一个尾迹传播和很少的涡扩散。因此,当尾流向下游发展时,存在强烈的涡旋相互作用,导致尾流垂直轨迹的超预报约为10%。k- λ realizable模型和k-ω SST模型能更好地捕捉尾迹的垂直轨迹,在最下游平面的垂直位置估计在DDES结果的2%以内。相反,Spalart-Allmaras模型未能充分捕捉反向旋转涡旋之间的相互作用。这导致尾流在最下游平面的垂直位置被低估了约18%。
CFD模拟的一个优点是它可以控制条件,从而可以在不同的操作条件和领域中研究车辆的空气动力学性能。一个理想的湍流模型应该提供稳健和一致的结果来执行这种跨域分析。
为了研究每个RANS模型对区域修改的敏感性,分别在计算风洞和开放道路区域进行了仿真。这些模拟的结果提供了风洞阻塞效应的数值表示,该效应预计将最小地受小的车辆重心高度变化的影响。因此,预计在整个车辆重心高度范围内,来自各域的力系数之间存在相对不变的偏移。因此,两个域的结果之间的偏移量的可变性可用于评估跨域分析的每个RANS模型的稳健性。图14显示了由计算风洞的力系数和开放道路的力系数。k-ω SST和RANS应力模型表明,在整个车辆重心高度范围内,下压力的偏移几乎是恒定的。相反,在Spalart - Allmaras和k- λ realizable模型的下压力偏移中观察到约4-5%的偏差。Spalart-Allmaras模型也描述了其阻力偏移约2%的偏差,而其他RANS模型显示的波动小于1%。
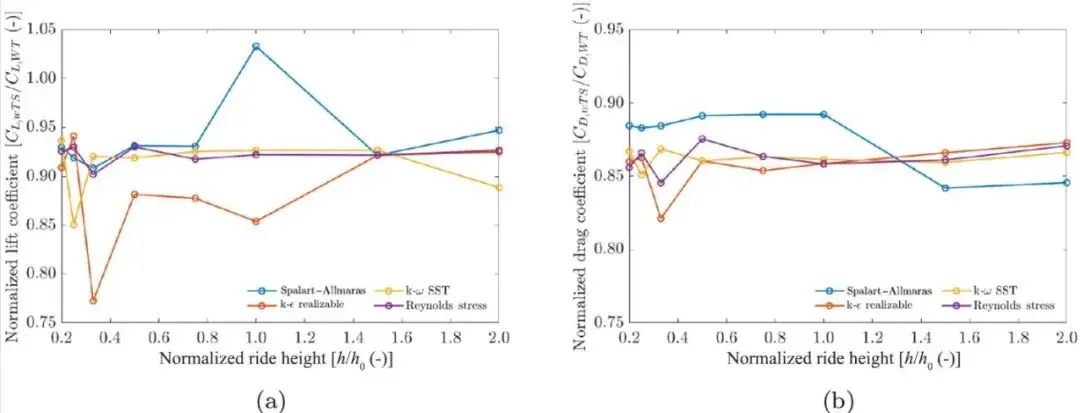
图14 wTS装置的(a)升力系数和(B)阻力系数由WT装置的力系数归一化。
在本次评估中,k-ω SST模型在RANS模型中显示出最高的准确性和一致性。在2%的高保真DDES结果估计范围内充分捕获了气动力趋势,并且与实验数据具有相当的相对精度。充分估计了上表面的表面压力分布。然而,由于RANS模型和DDES模型在逆压梯度敏感性上存在显著差异,在后风窗和扰流板的分离流区差异达到10%左右。然而,与其他RANS模型相比,k-ω SST模型表现相对较好。后风窗下游近壁回流速度和回流高度的预测值分别在DDES结果的5%和1%以内。此外,k-ω SST模型捕获的沿海底的压力分布大致在DDES数据的4%以内。在低压浓度、剪切应力分布和整个扩压器的顺流速度分布方面,得到了显著的定性一致。因此,扩压器产生的下压力被预测在DDES结果的3%以内。k-ω SST模型也充分捕获了主要的尾迹特征,如反向旋转涡对和来自上游分量的尾迹。尾流耗散被低估了约7%,而尾流垂直轨迹的估计在DDES结果的2%以内。此外,k-ω SST模型对区域修改的敏感性较低,两个计算区域的结果在理论不变偏移上的偏差小于1%。总的来说,k-ω SST模型为高性能车辆的性能和流场的通用气动分析提供了足够的精度和细节。与DDES模拟相比,它所需的计算时间减少了75倍,而使用的计算资源却减少了一半。因此,k-ω SST模型是一种实用且具有成本效益的模拟工具,将在本文的其余部分中使用。
风洞相关过程
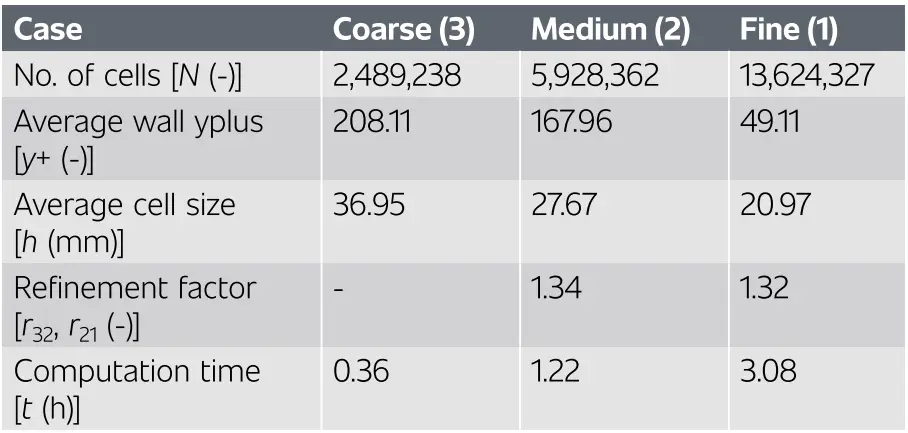
在风洞试验中,试验段壁面的存在限制了车辆模型附近的气流位移,从而增加了局部动压。通过在计算风洞域和开放道路域上的模拟,建立了这种阻塞效应的数值表示。图17显示,与开放道路条件相比,风洞阻塞效应导致下压力增加约9%,阻力增加约16%。如前所述,下压力的产生主要是由沿车辆表面的近壁流动决定的,而阻力主要是由车辆尾迹的压力阻力决定的。因此,应该考虑阻塞效应造成的局部流场变化,以理解对下压力和阻力产生的不均匀影响。
为了研究下压力产生的局部影响,图15提供了风洞和开放道路区域车辆表面压力分布的并排比较。在开放区域的屋顶和底体等区域发现的低压区域表明风洞区域的压力更低。这表明局部快速流动的气流由于阻塞作用而进一步加速。与开放道路条件相比,沿着屋顶增加的气流速度可以在局部增加近8%的升力。这也会影响下游的流动状况,导致扰流板上产生的下压力增加约3%。此外,在风洞区域内,沿下车身移动速度较快的气流使底板和扩压器的下压力分别增加约7%和9%。
图15 ![]() 时WT和wTS装置中(a)上表面和(b)下机身表面的压力系数等值线图,以及(c)上机身和(d)下机身表面接近对称线(y=−50mm)上的压力系数分布。
时WT和wTS装置中(a)上表面和(b)下机身表面的压力系数等值线图,以及(c)上机身和(d)下机身表面接近对称线(y=−50mm)上的压力系数分布。
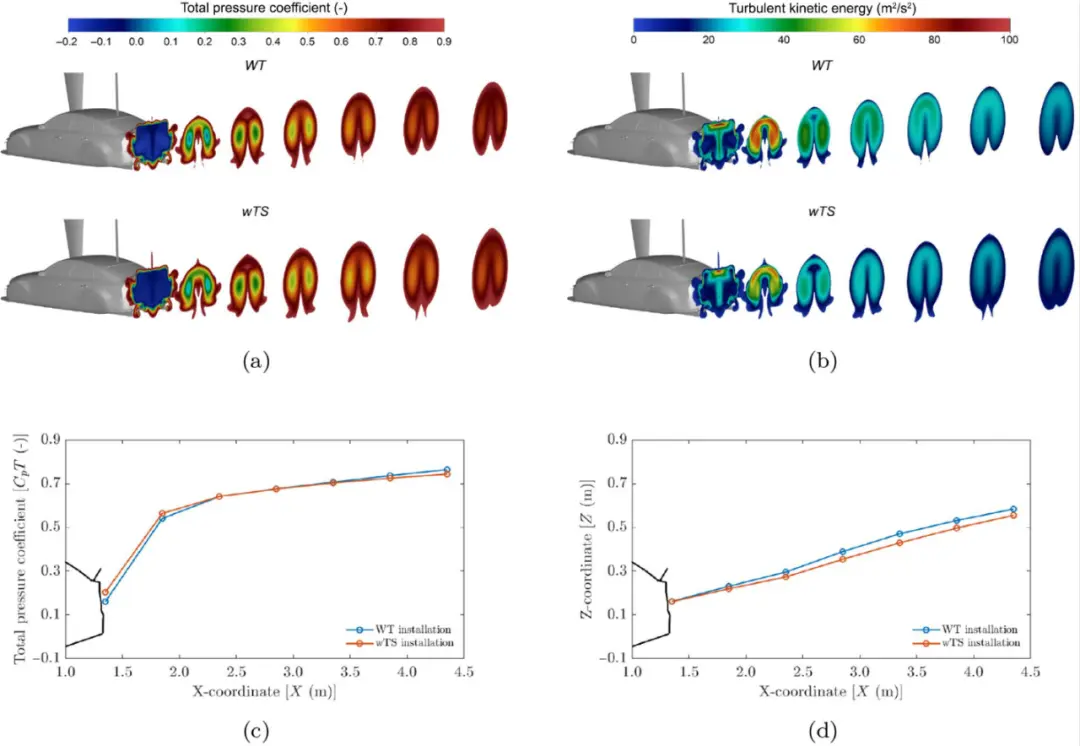
图16(a)尾流中垂直平面上的总压系数等值线图和(B)湍流动能等值线图(x=1.35m、x=1.85m、x=2.35m、x=3.35m、x=3.85m和x=4.35m),以及(c)面积加权平均总压系数和(d)总压损失加权平均![]() 时WT和wTS装置中尾流的垂直位置。
时WT和wTS装置中尾流的垂直位置。
除了对下压力的主要局部影响外,在风洞区域内,车辆前端的压力增加,这增加了该部件约11%的阻力。此外,车辆车身的流动分离得到了促进,与开放道路条件相比,车辆底部的压力阻力增加了约22%。在风洞区域,靠近车辆模型的较高流速也会在车辆表面施加较大的速度梯度,从而使表面摩擦阻力增加7%以上。
风洞和开放道路区域的尾迹比较(图16)表明,主尾迹特性不受阻塞效应的影响。尽管如此,上述增加的风洞区域流动分离也转化为在x = 1.35 m处近尾迹的平均压力损失增加约20%。然而,在风洞区域观察到更多的尾迹耗散,导致在x = 4.35 m处进一步下游的压力损失减少约3%。这是阻塞效应导致更快的气流运动的结果,它产生了更强的反向旋转涡对,包含更多的湍流动能。因此,在风洞区域内,能量耗散和与尾迹外气流的混合得到了促进。与开放的道路区域相比,阻塞效应还导致在尾流附近存在更高能量的气流。在低能尾流中混合高能量气流也促进了在风洞区域观察到的更快的尾流耗散。此外,尾流的轨迹在风洞区域比在开阔的道路区域高5%左右。这是由于在风洞区域内强涡对之间相互作用加剧的结果。
如前所述,通过在计算风洞域和开放道路域上进行模拟,创建了阻塞效应的数值表示。对计算风洞域的模拟结果应用了各种堵塞校正方法,以评估其准确性(图17)。修正后的力系数描述了两种方法之间的最大相对差异约为5%。对于所考虑的情况,基于maskell的校正方法显示,平均下压力校正约为3%,阻力校正约为9%。更为复杂的Thom、Herriot和Mercker方法比正确的下压力高出约2%,比正确的阻力高出约5%。新引入的CFD校正方法提供的校正力系数接近常规方法的平均值,下压力校正约为1%,阻力校正约为8%。
基于CFD和基于maskell的修正方法都采用了一种简单的方法来估计车辆模型附近的动压力增加,并用于修正力系数。然而,CFD校正使用具有代表性的模拟数据,而Maskell方法使用基本的几何关系。因此,Maskell方法与CFD方法的一致性表明,这些几何关系可以充分估计由堵塞效应的数值表示引起的动压力增加。然而,每种校正方法所应用的全局校正并没有单独考虑上述对升力和阻力的局部影响。因此,使用这种校正方法时应慎重考虑,特别是对阻力校正。更全面的方法,如在本文中进行的,将是可取的,甚至是必要的更详细的分析。
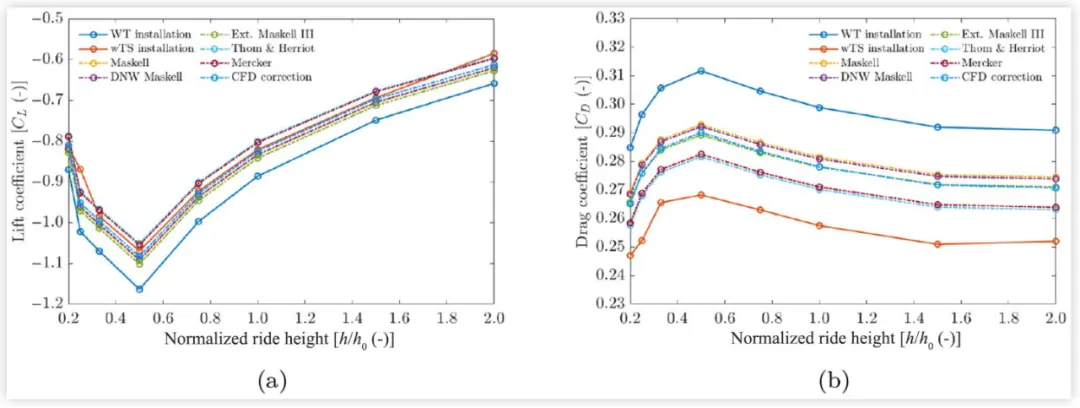
图17 修正方法应用于WT装置模拟中的(a)升力系数和(B)阻力系数。
通过在开放道路域的仿真,数值研究了顶置测量系统对安装顶置测量系统(wTS)和未安装顶置测量系统(wTS)车辆的干扰效应。与赛车上的研究结果相似,顶置测量系统的存在使下压力减少了约4%,阻力减少了8%。
两种车辆配置的压力分布表明,顶置测量系统前缘的滞止影响了挡风玻璃前方的再循环区域,从而增加了挡风玻璃本身的压力(图18)。顶部测量系统的空气动力学形状周围的局部气流加速使屋顶的升力产生增加了约6%。此外,下游形成了相对高能的流向涡旋,这些涡旋为沿斜面中心的气流提供了能量。顶置测量系统的存在也会影响沿车顶线的涡的形成。这些车顶线涡流在没有顶部测量系统的情况下,在车辆内部进一步传播,通过斜面两侧更宽的高速气流轨迹来描述
因此,在没有顶置测量系统的情况下,在车辆扰流板上形成了一个分布更均匀的高压区。采用顶置测量系统的车辆仅显示扰流板中心和外围周围的高压浓度,导致扰流板产生的下压力减少约30%。通过头顶测量系统,车辆扰流板上的压力累积减少,也使扰流板产生的阻力减少了约30%。此外,与扰流板相互作用的减少减少了局部流动分离,通过顶置测量系统,车辆后端的压力阻力减少了约11%。
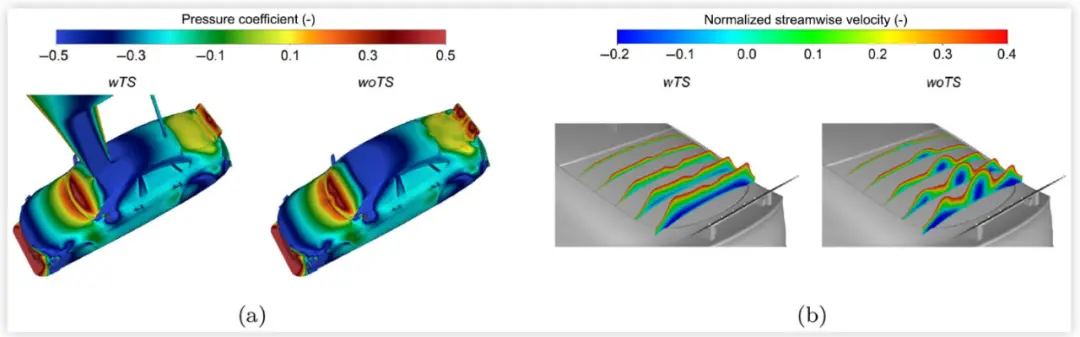
图18 (a)在wTS和woTS装置中,在1h0时,上机身表面上的压力系数等值线图和(b)沿着斜面(x=1.02m、x=1.065m、x=1.11m、x=1.155m和x=1.2 )的垂直平面上的标准化流向速度等值线图。
04 结 论
结合第三部分的实验力系数数据和流场高保真DDES结果,研究了四种RANS湍流模型对高性能汽车模型(driver hp-F)复杂流场的模拟性能。随后,在3.2节中对风洞阻塞效应和架空测量系统干扰效应进行逐步数值分析。本节还研究了各种堵塞校正方法在高性能车辆上的适用性。
实验力系数数据表明,在2h0 − 0.33h0的车辆重心高度范围内,下压力和阻力随着车辆的降低而增加。在0.33ho的临界车辆重心高度以下,沿车身的气流变得越来越不稳定,这对下压力和阻力产生产生不利影响。虽然RANS模型通常能够再现高至中等车辆重心高度时的力系数趋势,但在非常低的车辆重心高度时,其固有的无法预测高度不稳定的流动条件是显而易见的。从考虑的RANS模型来看,k-ω SST模型最适用于高性能车辆的气动仿真。气动力预测在DDES结果的2%以内提供,与实验数据具有相当的相对精度。然而,与DDES模型相比,k-ω SST模型在一半CPU核数上使用的计算时间减少了75倍。此外,k-ω SST模型与DDES模拟的更详细的流场数据表现出最好的总体一致性。总的表面压力分布和主要尾流特性的估计是紧密匹配的。由于模型的逆压梯度敏感性的变化,在斜面上的分离流区观察到较大的差异。
风洞阻塞效应的数值表示表明,在车辆模型附近动压的增加对下压力和阻力的影响是不相等的。在车顶和车底等气流快速移动的区域,会产生额外的气流加速度,从而使下压力增加9%。此外,阻滞压力、压阻和表面摩擦阻力均因堵塞作用而增加,导致总阻力增加16%。
新引入的CFD校正方法证实,传统校正方法使用的几何关系可以充分估计堵塞效应造成的动压力增加。然而,基于估计动压力的全局修正仅适用于下压力修正,因为局部阻塞对阻力的影响更大。此外,架空测量系统的最主要影响是局部流动加速和下游干扰效应,在考虑的设置中,它们将下压力降低了4%,阻力降低了8%。
总的来说,k-ω SST模型被推荐为一种具有成本效益的数值工具,用于比较设计过程或对高性能车辆在中高车辆重心高度下的一般流场和性能趋势进行气动分析。对于高度非定常流态占主导地位的条件,如低车辆重心高度或深入分析特定的流动特征,如漩涡传播,考虑到大量的计算成本,在可行的情况下,建议采用更复杂的方法,如DDES方法。此外,风洞相关过程将受益于本文中进行的数值阻塞和干扰效应量化,而不是使用传统的阻塞校正方法,因为这些方法对阻力的校正效果并不理想。
- 下一篇:新能源汽车电机旋变
- 上一篇:车规MCU的eFlash原理



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
