




 广告
广告





















































从长城汽车NOA直播首秀来看城市NOA的测试方法&落地方案

新能源汽车智能驾驶正从L2向L2+、L2++演进,一场围绕高速NOA和城市NOA的市场追击战正在开展,领航辅助驾驶/高阶智能驾驶(Navigate on Autopilot,NOA)成为业界布局的重点。
汽车NOA功能主要依赖于车载系统内的数据处理单元以及各种雷达、摄像头与GPS导航等在内的控制模块来运作。利用激光雷达对车辆周围的环境进行实时扫描,获取关于实时车速、车道标线、前车距离等相对的位置信息,并与GPS导航功能结合,实时规划行驶路径,实现从A点到B点的高效便利通行。

NOA车道中心保持
NOA系统可以实现自主上下匝道、智能变道、智能超车、提示预警、车道保持、自动避让、巡航行驶、人机共驾交互等功能,而且可以自主减速通过大曲率弯道,满足用户在高速、高架、城市道路多场景中的驾驶需求,在一定程度上减轻用户长时间的驾驶负担,缓解驾驶疲劳,提升用户的驾乘体验,让驾驶更安全更高效更舒适,提升驾驶安全性。
1、魏建军亲测长城全场景NOA
2024年4月15日,长城董事长魏建军在河北保定首次通过直播方式,驾驶搭载长城汽车智驾系统(Coffee Pilot Ultra)的魏牌蓝山,从长城技术中心出发,途经保定老城区,在各种真实的交通路况下,向广大网友全面展示长城汽车无高精地图全场景NOA,完成了对城市NOA的智驾体验的直播首秀。

长城NOA直播
本次长城智驾实测总里程16.6公里,平均车速24.7km/h,复杂路段行驶11.5公里,无车道线/车道线模糊行驶通过率100%。
其全场景城市NOA测试内容包括:
交通灯识别与路口转弯:精准识别,安全通过
障碍物识别与灵活绕行:合理避障,灵活绕行
全场景变道与车道线管理:顺畅并线,平稳行驶
定义未来驾驶:从规则到数据的智能演化

灵活绕行
长城汽车智驾系统基于Orin-X的高算力域控平台打造,硬件方面,搭配1个激光雷达,3个毫米波雷达,11个高清摄像头和12个超声波雷达,具备无高精地图全场景NOA能力。根据介绍,CP Ultra能够实现从行车到泊车、从高速到城乡的全场景连接。
2、城市NOA的发展历程
NoA的全称是Navigate on Autopilot,发起者是特斯拉,最早以导航地图为牵引在高速上应用,完成自动变换车道、超车、启停、进出匝道等操作。
领航辅助驾驶(NOA)分为高速NOA和城市NOA,当前,高速NOA已实现规模落地,城市NOA正进入快速推进阶段。
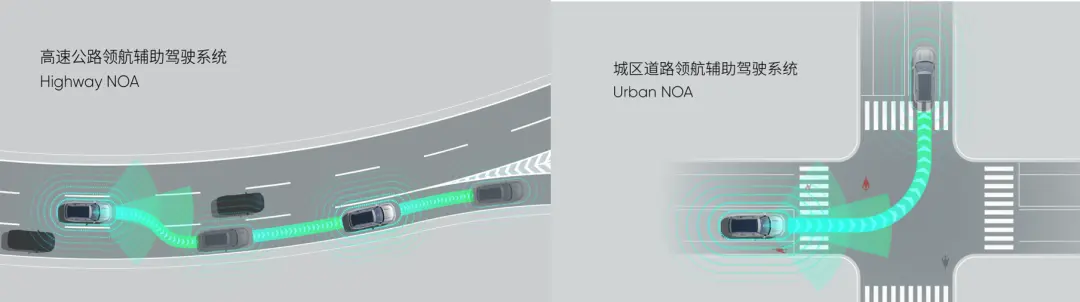
高速NOA&城市NOA
区别于高速NOA,城市NOA主要用于城市道路上的行驶,特别是在拥堵的城市路段,能够提供更加智能的导航和驾驶辅助功能。以城市NOA为代表高阶智能驾驶,其功能更加多样化,可以更好地适应城市道路的环境和交通状况。其功能包括:
基本导航功能;
自动泊车功能;
定点停车功能;
智能跟车功能;
2019年6月,特斯拉官方正式向中国市场内全部选配了FSD完全自动驾驶的车型,推送最新版本NOA,能够令车辆自动驶入和驶出高速公路匝道或立交桥岔路口,并超过行驶缓慢的车辆。
2020年10月,蔚来汽车自主研发NOP(Navigate On Pilot),深度融合了导航系统、百度高精地图和 NIO Pilot 自动辅助驾驶系统。
2022年9月,小鹏汽车自主研发NGP(Navigation Guided Pilot)功能在小鹏P5车型上率先搭载,成为国内首个量产落地城市智能辅助驾驶功能的汽车公司。
2023年9月,理想汽车通勤NOA内测首推10城,基于国产芯片实现NOA全栈自研,核心的逻辑是通过和清华研发的神经网络NPN、自研的TIN信号灯识别网络以及Occupancy(占用网络)弥补原有BEV算法识别的局限。
2024年2月,问界系列车型将通过OTA升级,在全国城区支持开启高阶智能驾驶功能。
2024年4月,魏牌蓝山基于多传感器融合感知能力,全新升级智驾系统。

城市NOA落地排行榜
在NOA抢位争夺赛的背后,一场关于高阶辅助驾驶发展模式的竞争正在不断加剧,四种不同的发展路径已清晰可见:
车企全栈自研模式;
智选模式;
供应商全栈布局模式;
自选超市模式。
就其未来市场占比来看,车企全栈自研技术要求、实施成本较高、风险规避能力较弱,有可能会限制未来市场规模。
3、NOA测试评价方法
智能导航辅助驾驶(NOA)功能是一项确保安全前提下的舒适性驾驶辅助功能,包含车道居中行驶、主路巡航行驶、触发式变道、自动变道超车、匝道内行驶辅助、进出匝道行驶、自动泊车、定点停车、智能跟车、交通灯识别与路口转弯、障碍物识别与灵活绕行、全场景变道与车道线管理等功能。
(1)功能测试场景设计
根据上述功能定义,参照现行近L3的自动驾驶法规UNECE ALKS、Euro-NCAP HWP评价规程等可以选取了三类典型的NOA功能:纵向跟驰避撞、主动转向避撞与限速识别控制,设计功能测试场景:前车走停跟随与纵向避撞场景、前车切入场景、限速标志识别场景等。

前车走停跟随与纵向避撞场景
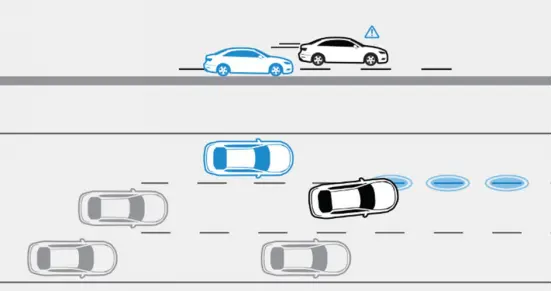
前车切入场景

限速标志识别场景
(2)NOA典型测试场景下的评价体系
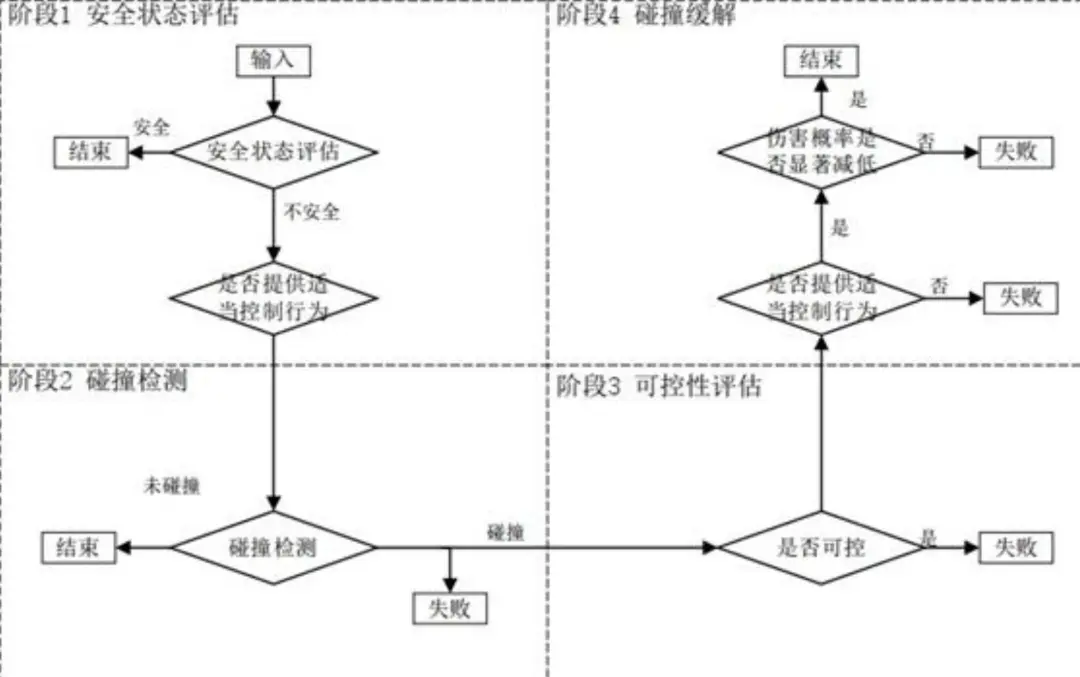
针对NOA系统安全性的评价,参考ISO 21448 道路车辆功能安全中的测试评价方法,采取如下图所示的评价流程:
来源知乎[智驾在这技术团队]
NOA典型测试场景评价流程:
在测试车辆满足阶段1安全状态评估要求后;
进入阶段2碰撞检测阶段,使用运动学指标或仿真引擎输出的碰撞检测标志进行评估;
若无法完全避撞,则进入阶段3可控性评估功能安全中的可控性(驾驶员在该场景下的控制能力),根据功能安全推荐值查表;
最后进行阶段4碰撞缓解程度的评估,对于纵向避撞场景,NCAP规程推荐使用相对车速减少率与主车制动减速量进行评估。
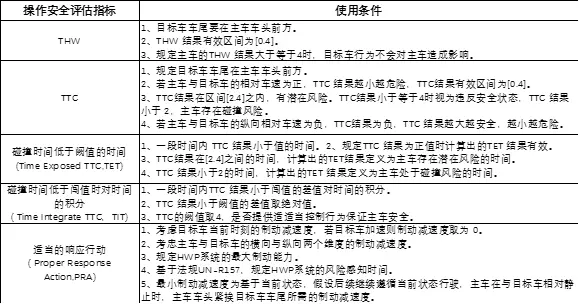
(3)NOA典型测试场景下的评价指标
以前车走停跟随与纵向避撞场景、前车切入场景为例,基于Euro-NCAP、C-NCAP等法规要求,可以设计如下表所示的安全状态评估指标:
来源知乎[智驾在这技术团队]
随着新能源汽车电动化、智能化的不断演进,加入了包括算法、图像识别等内容,仅保证自身无故障已经不足以满足自动驾驶对于安全的需求。汽车NOA技术“重感知、轻地图”的呼声越来越高,国内厂商主要基于BEV+Transformer技术,对系统感知能力进行优化和升级,以减少对高精地图的依赖,从而降低成本、推动城市NOA的快速落地。
总而言之,城市NOA是辅助驾驶的天花板,也是自动驾驶的门槛,而车企想要攻破城市NOA,必须去高精地图。只有解决场景最为复杂的城市NOA难题,自动驾驶才有可能真正到来。







最新资讯
-
标准解读丨ISO 21111 《道路车辆车载以太网
2025-03-31 19:15
-
清研精准兆瓦级充放电测试设备——重新定义
2025-03-31 19:13
-
强强联合:imc FAMOS内嵌Python接口,提高
2025-03-31 19:12
-
汽车动力电池与发动机系列标准宣贯会在武汉
2025-03-31 16:08
-
氢内燃机2.0-西南研究院(SwRI)启动第二阶
2025-03-31 16:06
