




 广告
广告





















































联合国自动驾驶法规R157对L3级自动驾驶ALKS的要求⑦

1.背景
2.R157各名词定义
3.系统安全和故障安全响应要求
4.人机交互界面信息要求
5.障碍物和事件感知与响应要求
6.数据存储系统要求
7.网络安全和软件更新要求
8.交通干扰关键场景指南
9.ALKS功能和操作安全的特殊要求
10.试验场内测试规范
11.公共道路测试规范
8. 交通干扰关键场景指南
8.1 一般要求
8.2 交通关键场景
8.2.1
(a)切入:“另一辆车”突然合并到ALKS车辆前面;
(b)切出:“其他车辆”突然离开ALKS车辆的车道;
8.2.3
每一个交通关键场景都可以使用以下参数/元素创建:
(a)道路几何形状;
(b)其他车辆的行为/机动。
8.3 ALKS的性能模型
8.3.1.
8.3.2
8.3.3 性能模型1
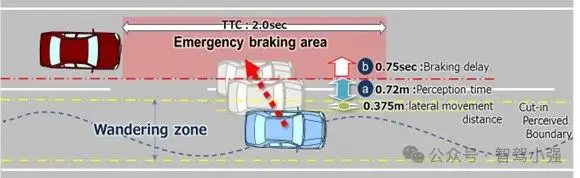
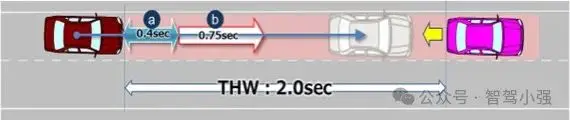
下图是这部分的可视化表示:
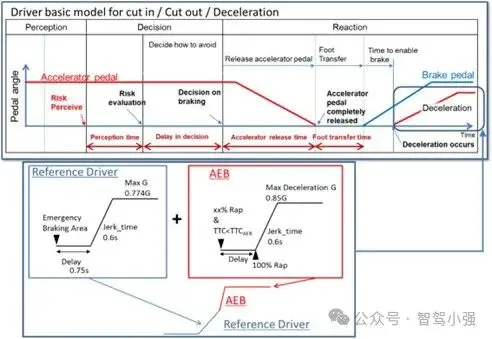
老司机和ADAS(AEB)的感知、决策、反应这三个部分的性能模型因子应作为评估ALKS避撞的条件。
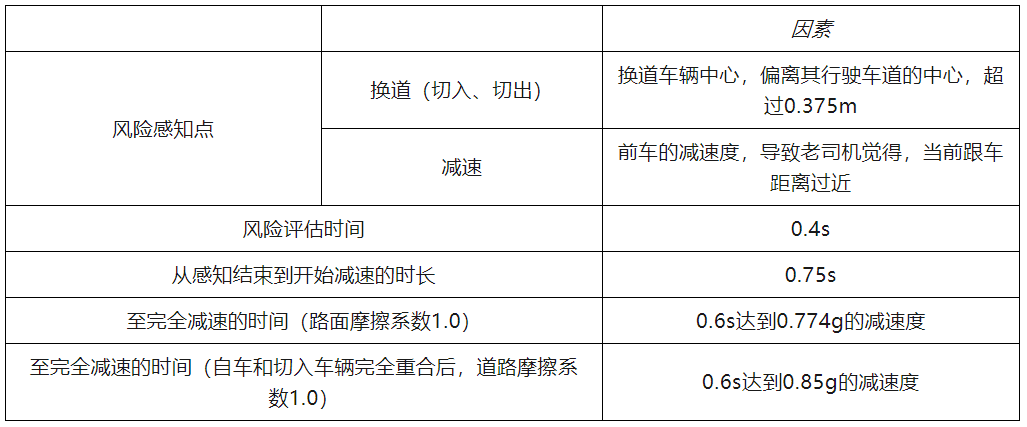
三种ALKS情景的驾驶因素模型:
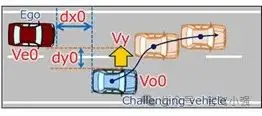
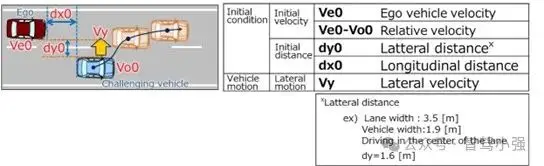
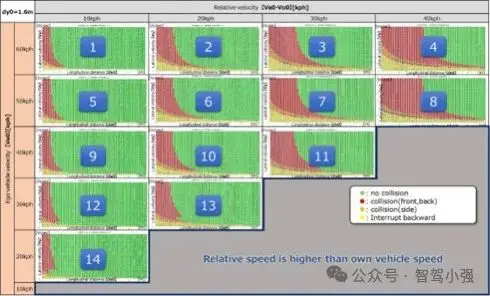
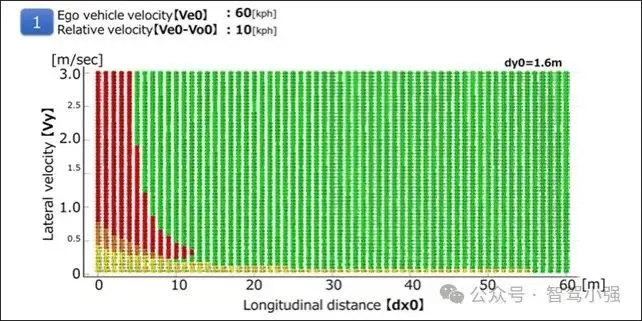
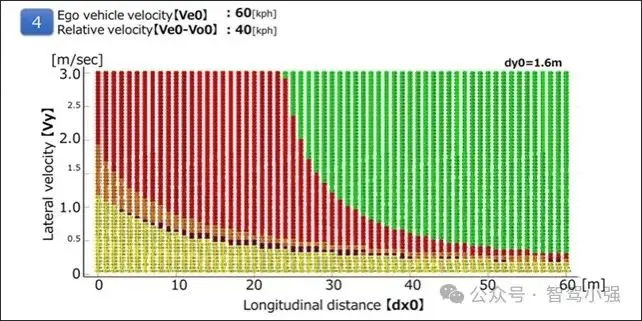
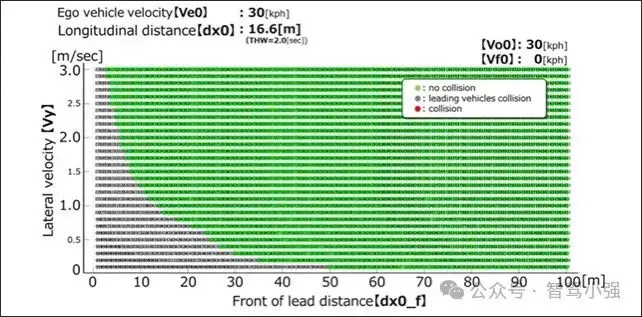
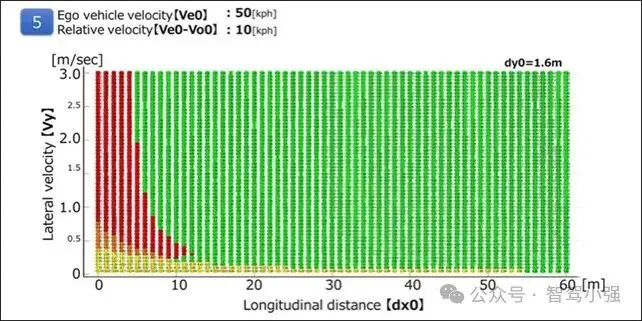
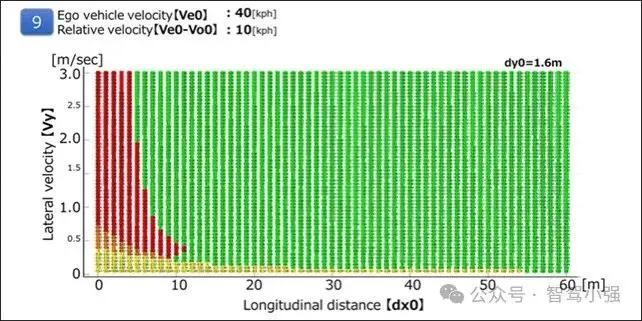
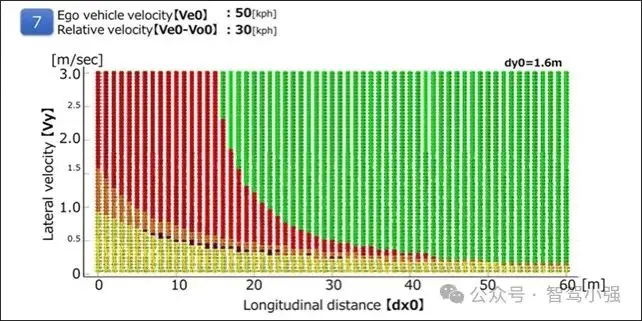
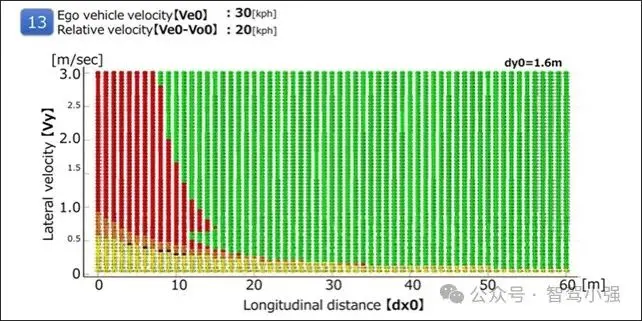
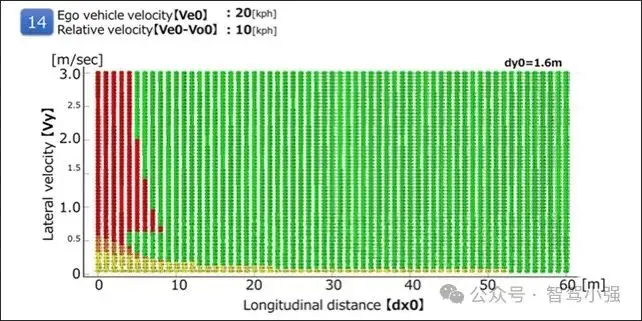
(a)切入场景:
旁车道车辆沿车道中心行驶,偏离车道中心±0.375m以内属于正常行驶。
当旁车道车辆超过正常行驶的横向偏离距离(可能此时还未变道,也未压线)时,认为切入场景开始。
距离a是基于风险评估时间[a]的感知距离。它定义了感知车辆正在执行切入机动动作所需的横向距离a。由以下公式获得;
a=横向移动速度x风险评估时间[a](0.4秒)
当旁车道车辆超过切入边界阈值(0.375m)时,风险评估时间开始。
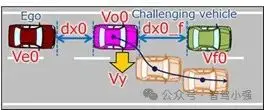
(b)切出场景:
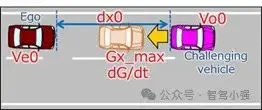
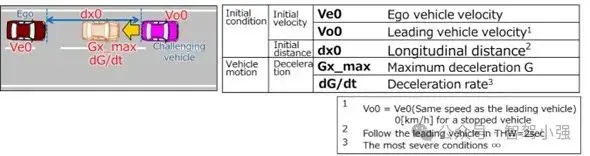
(c)减速场景:
风险评估时间[a]为0.4秒,当前导车辆超过减速阈值5m/s²时,风险评估时间[a]开始。
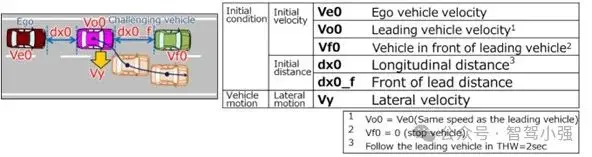
模型中的相关参数如下表所示:
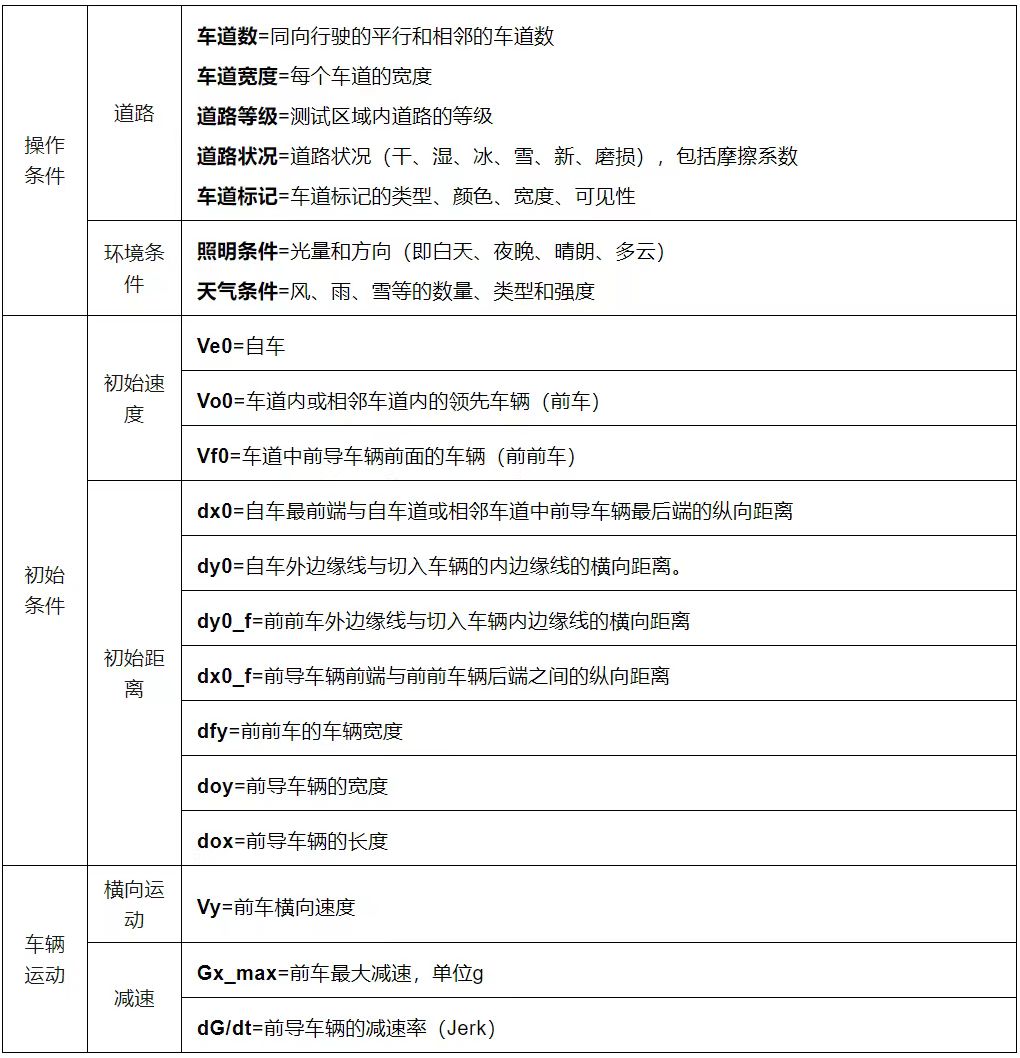
可以根据作业环境增加其他参数(例如道路摩擦系数、道路曲率、照明条件等)。
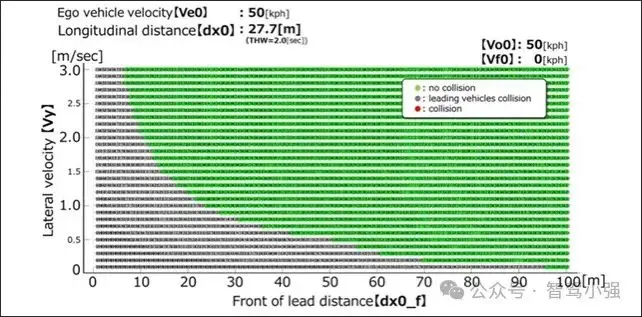
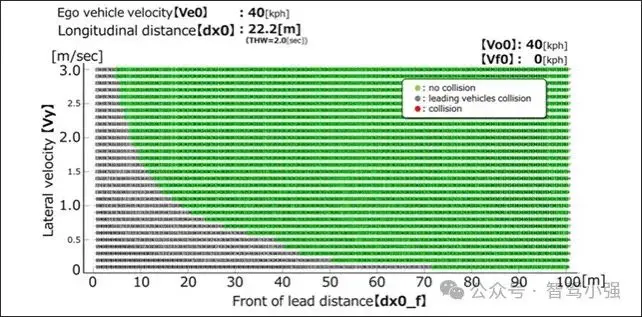
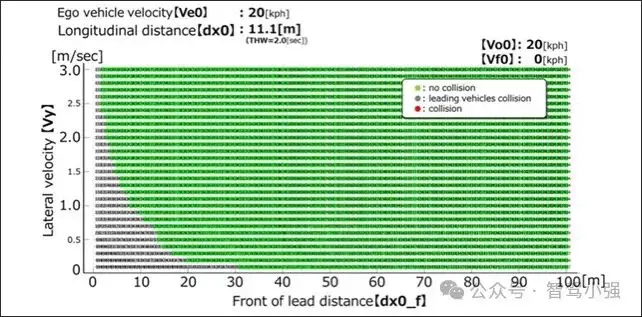
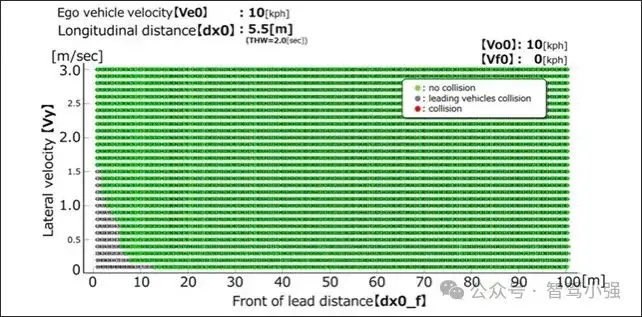
(a)切入场景:
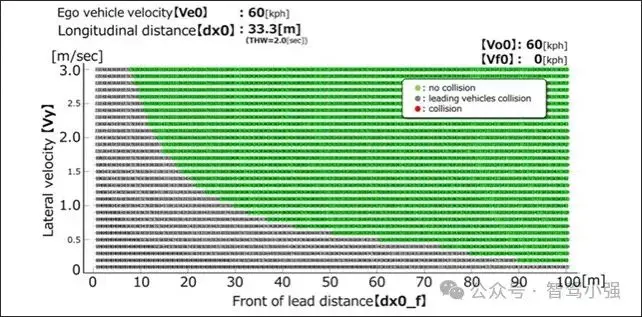
(b)切出场景:
在碰撞时间2s的情况下,ALKS车辆应能避免与切出车辆前方所有的减速(静止)车辆碰撞。
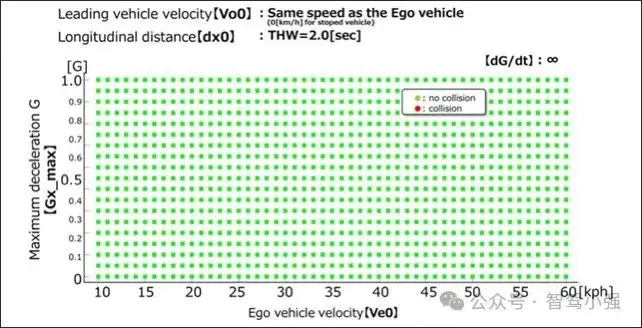
(c)减速场景:
在碰撞时间2s的情况下,ALKS车辆应能避免与前方小于等于1g减速度减速的车辆相撞。
8.3.4 性能模型2
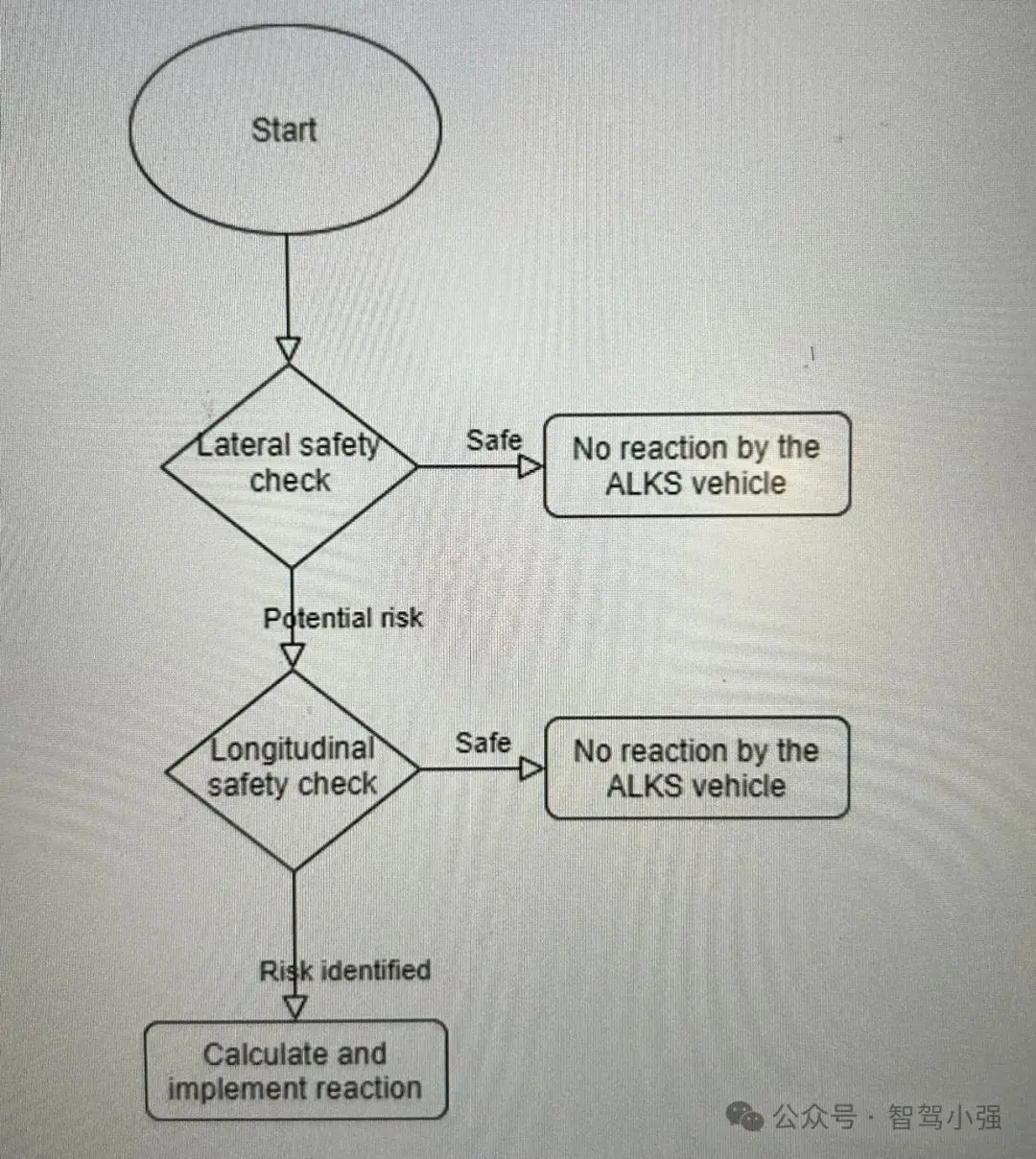
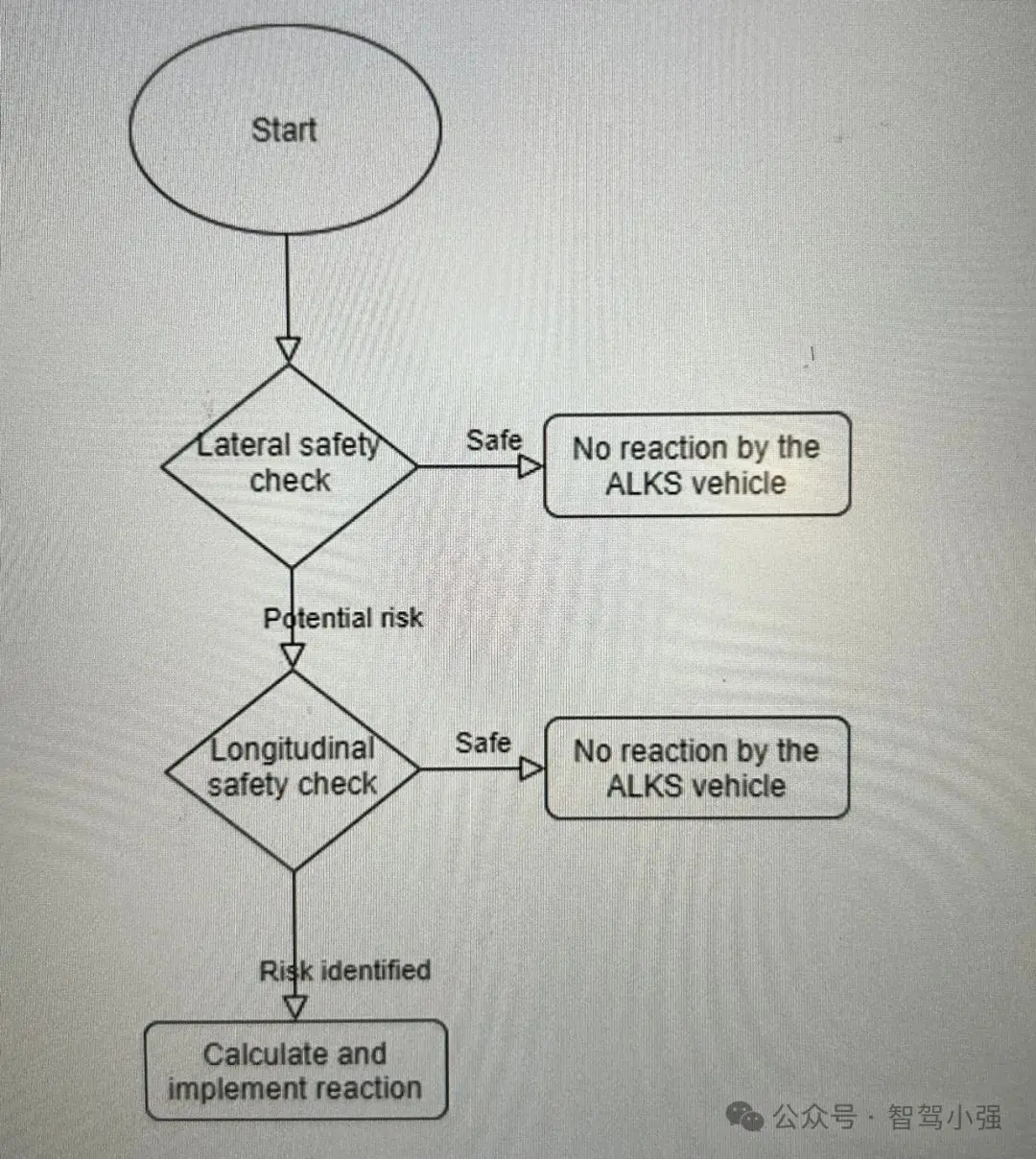
在第二个性能模型中,假设驾驶员可以预测碰撞风险并按比例制动。在这种情况下,性能模型考虑以下三个操作:“横向安全检查”、“纵向安全检查”和“反应”。只有在横向和纵向检查中均识别出紧急碰撞风险时,才会实施反应。下图提供了性能模型2中驾驶员在切入场景中遵循的决策流程的可视化表示。
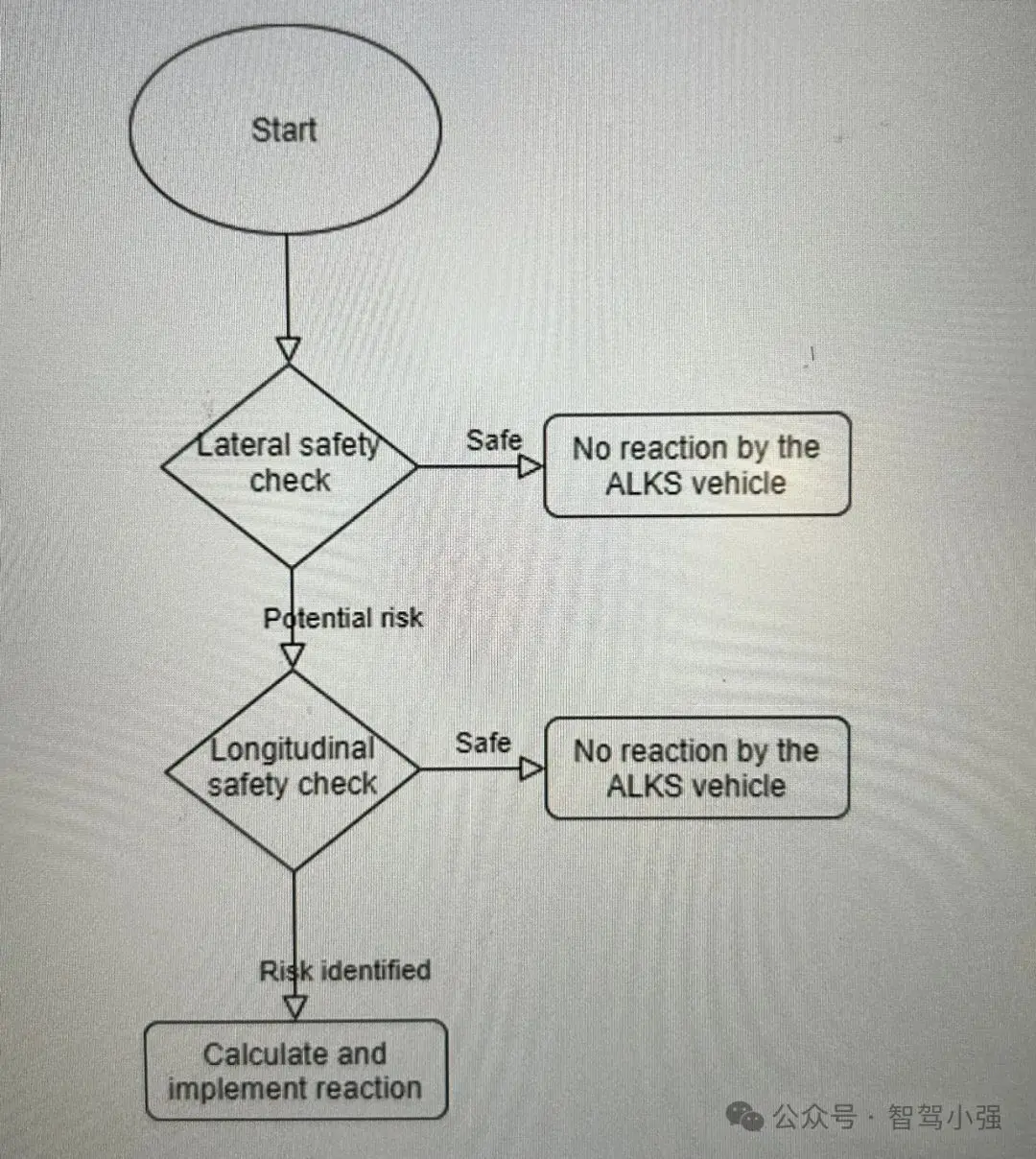
(a)切入场景:
如果满足以下条件,横向安全检查可以确定存在潜在的碰撞风险:
(a)纵向方向上,“其他车辆”(切入车辆)的后部在ALKS车辆的前部的前面;
(b)“切入辆车”正在向ALKS车辆移动;
(c)ALKS车辆的纵向速度大于“切入车辆”的纵向速度;
(d)以下方程是满足的:
distlat/vcut-in,lat<(distlon+lengthego+lengthcut-in)/(vego,lon-vcut-in,lon)+0.1
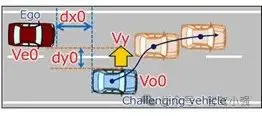
distlat:是两辆车之间的瞬时横向距离;
distlon:是两辆车之间的瞬时纵向距离;
lengthego:是ALKS车辆的长度;
lengthcut-in:是切入车辆的长度;
vcut-in,lat:是切入车辆的瞬时横向速度;
vego,lon:是ALKS车辆的瞬时纵向速度;
vcut-in,lon:是切入车辆的瞬时纵向速度;
纵向安全检查需要评估两个模糊代理安全指标,即主动模糊代理安全指标(PFS Proactive Fuzzy Surrogate Safety Metric)和关键模糊代理安全指标(COS Critical Fuzzy Surrogate Safety Metric)。
PFS由以下方程定义:
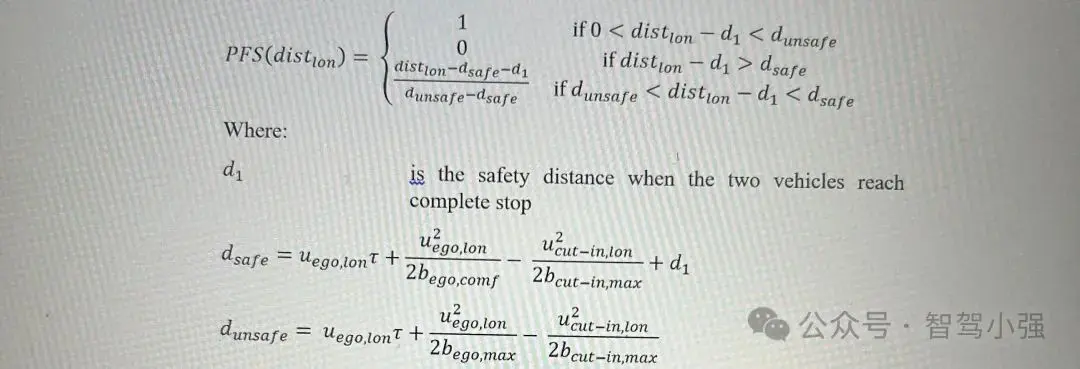
d1:是两辆车完全停车时的安全距离;
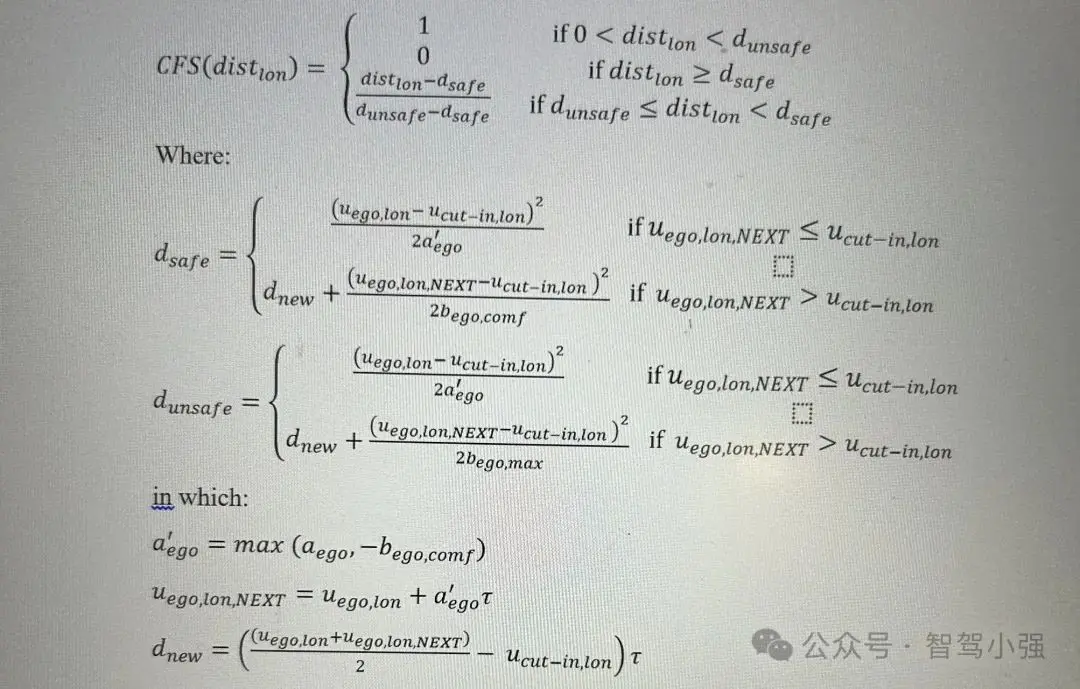
CFS由以下方程定义:
aego:是ALKS车辆的瞬时纵向加速度;
dnew:是反应时间后ALKS车辆和切入车辆之间距离的预期纵向变化;
纵向安全检查确定了如果PFS或CFS大于0的潜在风险。
如果确定了风险,则假设ALKS车辆按照以下等式通过减速来计划和实施反应:
CFS>0时:
breaction=CFS·(bego,max-bego,comf)+bego,comf
CFS=0时:
breaction=PFS·bego,comf
减速在反应时间τ后开始实现,以恒定速率达到最大减速度。
如果ALKS车辆的反应无法防止车辆与切入车辆相撞,则该场景被归类为不可预防的,否则被归类为可预防的。
(b)切出场景:
(a)横向安全检查被忽略了,因为ALKS车辆和静态物体已经在同一车道上。
(b)纵向安全检查按PFS、CFS进行评估,使用静态物体的参数进行计算,而不是切出车辆的参数。
(c)假设ALKS车辆在切出车辆中心偏离车道中心0.375m之前无法启动反应时间。
(c)减速场景:
(a)横向安全检查被忽略,因为ALKS车辆和前面的车辆已经在同一车道上。
(b)纵向安全检查按PFS、CFS进行评估,使用前前车的参数进行计算,而不是切出车辆的参数。
第二个性能模型的软件实现,按照切入、切出、减速三个交通关键场景进行推导分类,该软件是公开可用的。
为了确定ALKS车辆应避免碰撞的条件,应使用以下性能模型因素。








最新资讯
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
试验载荷谱采集
2025-04-29 11:07
-
APx500 软件演示模式 (Demo Mode) 竟有这些
2025-04-29 08:37
