




 广告
广告





















































联合国自动驾驶法规R157对L3级自动驾驶ALKS的要求⑨

1.背景
2.R157各名词定义
3.系统安全和故障安全响应要求
4.人机交互界面信息要求
5.障碍物和事件感知与响应要求
6.数据存储系统要求
7.网络安全和软件更新要求
8.交通干扰关键场景指南
9.ALKS功能和操作安全的特殊要求
10.试验场内测试规范
11.公共道路测试规范
10.试验场内测试规范
10.1 简介
本附件定义了旨在验证ALKS技术要求的试验场内测试。本附件中的所有测试应在以下规定的批准过程中由技术服务部门执行或见证(不认可主机厂自己提交的报告)。
在达成具体测试规定之前,型式认证机构或代表其行事的技术服务(以下简称型式认证机构)应确保ALKS至少接受第10部分和第11部分概述的测试。每次测试的具体测试参数应由型式认证机构选择,并应以允许测试设置的可追溯性和可重复性的方式记录在测试报告中。
测试的合格和不合格标准仅源自第3至2段中的技术要求。这些要求的措辞允许推导合格-不合格标准,不仅适用于给定的测试参数集,还适用于系统设计工作的任何参数组合(例如操作速度范围、操作横向加速度范围、系统边界中包含的曲率范围)。

本文件中规定的试验应作为一组最低限度的试验。型式认证机构可以在系统ODD内执行额外的试验,并将测量结果与要求进行比较(具体为:预期试验结果)。
10.2 定义
10.2.1 “碰撞时间Time To Collision(TTC)”是指在任何时刻,通过将ALKS车辆和目标之间的纵向距离(在ALKS车辆行驶方向上)除以ALKS车辆和目标的纵向相对速度而获得的时间值。
10.2.2 “偏移Offset”是指车辆与相应目标纵向中间平面在行驶方向上的距离,在地面上测量,按车辆宽度的一半归一化,不包括间接视觉设备(不含后视镜),并通过添加50%进行校正。
10.2.3 “行人目标Pedestrian Target”是代表行人的软目标。

10.2.4 “乘用车目标Passenger car Target”是代表乘用车车辆的目标。
10.2.5 “动力双轮目标Powered Two-Wheeler Target(PTW)”是指摩托车和摩托车驾驶员的组合。

10.2.6 “困难Difficult”参数范围标识了导致即将发生碰撞风险的一组具体情景。
10.2.7 “可通行物体passable object”是这样一种物体,无论ALKS车辆的轮胎是否与该物体接触,都可以在不对车辆乘员或其他道路使用者造成不合理风险的情况下行驶。
10.2.8 自动车道保持系统的“操作设计域Operational Design Domain(ODD)”定义了本法规所确定的边界内的特定操作条件(例如环境、地理、时间、交通、基础设施、速度范围、天气和其他条件),在这些边界下,自动车道保持系统被设计为在没有驾驶员任何干预的情况下运行。
10.3 一般原则
10.3.1 场地内测试
系统应在具有各种场景元素的封闭区域内进行验证,以测试ALKS的能力和功能。

10.3.2 测试条件
试验应在允许激活ALKS的条件(例如环境、道路几何形状)下进行。 对于在车辆规定的运行范围内可能发生的未测试条件,主机厂应作为第9段中描述的审计的一部分证明车辆是安全控制的,以使型式认证机构满意。
如果为了允许测试需要进行系统修改,例如道路类型评估标准或道路类型信息(专门增加试验场内的地图数据),则应确保这些修改不会对测试结果产生影响。这些修改原则上应记录在案并附在测试报告中。这些修改的描述和影响证据(如果有的话)应记录在案并附在测试报告中。
为了测试功能失效、系统自我测试和初始化以及实施最小风险操作的要求,可能会人为地制造故障/错误,车辆可能会被人为地带入到规定运行范围限制之外的情况(例如环境条件)。
应验证系统的状态是否符合预期的测试目的(例如,处于无故障状态或具有待测试的特定故障)。
测试道路表面应至少提供场景所需的附着力,以达到预期的测试结果。
车辆状况:
试验质量:试验对象车辆应在主机厂和型式认证机构商定的负载条件下进行测试。一旦试验程序开始,不得更改负载。主机厂应通过使用留档证明系统在所有负载条件下正常工作。
应在主机厂建议的轮胎压力下对所涉车辆进行测试。
测试工具:
用于车辆检测测试的目标车辆应是常规的大批量生产的M类或N类车辆,或者是根据ISO 19206-3:2018适用于被测ALKS传感器系统的识别特性代表车辆的“软目标”。车辆位置的参考点应是车辆中心线上最靠后的点。
用于动力两轮车试验的目标应是符合ISO CD 19206-5的试验装置或经批准的L3类大批量生产的摩托车,发动机容量不超过600cm³。摩托车位置的参考点应是摩托车中心线上最后的点。

用于行人检测测试的目标应为满足ISO 19206-2:2018要求的人类“关节软目标”。
作为参考目标的替代方案,可使用带自动驾驶大平板的假车或最先进的测试工具(如软目标、移动平台等)进行测试,取代在ODD内可能合理遇到的真实车辆和其他道路使用者,包括雷达信号差的车辆(如塑料或碳纤维车身、非常小的车辆等)。应确保取代参考目标的测试工具具有与参考目标或其所代表的车辆/道路使用者相当的特征。测试不得以危及所涉人员的方式进行,在有其他验证手段的情况下,必须避免被测车辆的重大损坏。
使测试目标得以具体识别和复制的细节应记录在车辆型式批准留档中。
10.3.3 测试参数变化
主机厂应向型式认证机构声明ALKS系统边界。型式认证机构应定义测试参数的不同组合(例如ALKS车辆的当前速度、目标类型和偏移量、车道曲率),以涵盖本附件本段规定的场景。
如果这被认为是合理的,则可以额外测试任何其他参数组合。
型式批准机构应确定测试方案难度级别的分类方法。应选择交通关键场景的参数以确保一定的难度级别。型式批准机构应包括交通关键场景的测试,如果有的话:
(a)在“困难”参数范围内;
(b)在给定场景的“不可避免的碰撞”参数范围内。
型式认证机构可以使用第8段中提供的指导方法来确定测试的难度。
对于“不可避免的碰撞”类的场景,在与型式认证机构达成一致的情况下,主机厂可以通过留档或(如果可能)通过验证/测试来证明系统不会不合理地切换其控制策略。
10.4 测试场景,用于评估系统在动态驾驶任务方面的性能
应根据操作设计域(ODD)选择测试场景。
在型式批准时,型式批准机构应进行或见证至少以下测试以评估ALKS的行为:
10.4.1 车道保持
试验至少应在下列条件下进行:
(a)最短测试时间为:
(b) 以乘用车目标和PTW目标作为领航前车/其他车辆;
(c)领航前车在车道上转弯;和
(d)另一辆车在相邻车道靠近行驶。
10.4.2 避免与道路使用者或挡住车道的物体发生碰撞
本试验至少应在下列情况下进行:
(a)静止的乘用车目标;
(b)静止的动力两轮车目标;
(c)静止的的行人目标;
(d)行人目标以5km/h的速度穿过车道,ALKS车辆在60km/h及以下的车速下避撞;
(e)车道中心的静止目标;
(f)部分遮挡车道的静止目标;
(g)多个连续障碍物挡住车道(例如按以下顺序:ALKS车辆-PTW-汽车);
(h)在弯曲的路段上。

10.4.3 跟随前车(减速场景)
本试验至少应在下列情况下进行:
(a)在ALKS的整个速度范围内;
(b)使用客车目标和公共交通工具目标作为前方领航车辆,前提是有适合安全进行测试的标准化公共交通工具目标;
(c)对于恒定和变化的前车速度(例如,遵循现有驾驶数据库中的真实速度曲线);
(d)对于直线和曲线路段;
(e)对于车道中领航车辆的不同横向位置;
(f) 前方领航车辆在完全减速直到静止的过程中,减速度至少为6 m/s²。
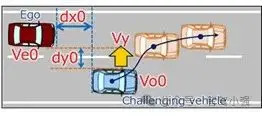
10.4.4 切入场景
试验应证明ALKS能够避免与可以避撞的切入ALKS车辆所在车道的车辆发生碰撞。
切入操纵的临界度应根据TTC、切入车辆最后点与ALKS车辆最前点之间的纵向距离、切入车辆的横向速度和切入车辆的纵向速度来确定。
本试验应至少在下列情况下进行:
(a)切入机动的不同TTC、距离和相对速度值,涵盖可以避免碰撞和无法避免碰撞的切入情景类型;
(b)以恒定纵向速度行驶、加速和减速的切入式车辆;
(c)切入车辆的不同横向速度、横向加速度;
(d)乘用车以及动力两轮车PTW作为切入目标,前提是有适合安全执行测试的标准化PTW目标可用。
10.4.5 前车变道后的静止障碍物(切出场景)
试验应证明ALKS能够避免与静止车辆、道路使用者或前车通过规避动作(切出)避免碰撞后变得可见的阻塞本车道的障碍物发生碰撞。
试验至少应以下列方式进行:
(a)车道中心的静止客车目标;
(b)车道中心的动力两轮车目标;
(c)车道中心的静止行人目标;
(d)车道中心的静止障碍物目标;
(e)多个连续障碍物阻塞车道(例如按以下顺序:ALKS车辆-变道车辆-PTW-汽车)。

10.4.6 视野测试(感知范围)
试验应证明ALKS能够检测到前方检测区域内的另一道路使用者,直至宣布的前方检测范围,以及横向检测区域内的旁边车辆,直至至少相邻车道的整个宽度。如果ALKS能够进行车道变更,则还应证明ALKS能够检测到第5.1段宣布的前方、侧面和后方检测范围内的另一辆车,并在适用的情况下,检测到第5.1段宣布的转向灯状态检测区域内另一辆车的转向灯状态。
前方探测范围:
前向探测射程试验应至少在下列情况下进行:
(a)接近位于每个相邻车道外缘的PTW目标;
(b)接近位于每条相邻车道外缘的静止行人目标;
(c)接近位于自车道内的静止PTW目标;
(d)接近位于自车道内的静止行人目标。
如果ALKS能够执行LCP,则本段的要求适用于该系统:
从ALKS车辆中心向ALKS执行LCP的一侧接近9m的PTW目标,应执行前向探测范围测试。
横向探测范围:
横向探测射程试验应至少采用下列方法进行:
(a)PTW目标从左相邻车道接近ALKS车辆;
(b)从右侧相邻车道接近ALKS车辆的PTW目标。
本段的要求适用于系统,如果ALKS能够执行LCP,横向检测范围的测试应至少使用以下方法进行:
(a)PTW目标沿着ALKS车辆中心线左侧9m位置接近ALKS车辆;
(b)PTW目标沿着ALKS车辆中心线右侧9m位置接近ALKS车辆。
后向探测范围:
如果ALKS能够执行LCP,则本段的要求适用于该系统。
后向检测范围的测试应至少使用以下方法进行:
(a)从ALKS车辆中心线量度,在ALKS车辆左侧9m范围内从后方接近ALKS的PTW;
(b)从ALKS车辆中心线量度,在ALKS车辆右侧9m范围内从后方接近ALKS的PTW。
转向灯状态检测区域:
本款的规定适用于具有检测另一车辆转向灯状态能力的ALKS车辆。
转向灯状态检测区域的测试应至少使用:
(a)在第5.1段所宣布的范围内随意设置的车辆的转向灯的启动;
(b)不同类型的车辆,包括乘用车和PTW。
10.4.7 变道测试
只有当ALKS能够进行变道时,才需要进行变道测试。
测试应证明ALKS车辆在LCP期间不会对车辆乘员和其他道路使用者的安全造成不合理的风险,系统能够正确执行变道,并能够在LCM前评估周围情况的危急程度。
试验至少应在下列情况下进行:
(a)不同的车辆,包括从后面接近的PTW;
(b)在常规操作中的LCM是可能的和执行的情况下(常规变道LCM正常执行);
(c)由于有车辆从后方驶来而不可能有正常运作的LCM的情况(LCM因接近车辆而中断);
(d)在相邻车道后跟同样快的车辆,防止变道(阻止LCM开始);
(e)在相邻车道旁行驶的车辆防止变道(阻止LCM开始);
(f)在MRM期间可能并执行LCM的情况下(MRM变道LCM正常执行);
(g)在ALKS车辆对另一辆开始进入目标车道内相同空间的车辆做出反应的情况下,以避免潜在的碰撞风险(LCM中断)。
10.4.8 避免误触发紧急机动
试验至少应在下列条件下进行:
(a)没有领航前车;
(b)以客车目标为领航前车;
(c)以PTW目标为领航前车。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
