




 广告
广告





















































AES,主动安全领域的“一代宗师”

人类驾驶员在开车过程中,面对存在碰撞风险的障碍物(前方车辆突然紧急制动、相邻车道前方车辆突然Cutin、行人/二轮车横穿等),常会采取两种策略:一种是通过制动减速来避免碰撞,一种是通过转向改变行驶路线来避免碰撞。
但是驾驶员不是铁打的,开车过程中难免出现分心、疲劳的情况,这就导致部分情况无法及时识别到风险。就算驾驶员注意力保持高度集中,能够及时识别到风险,但是考虑到驾驶员的反应延迟时间以及紧张心里,面对一些紧急碰撞风险场景,往往也无法实现最佳的避撞效果。
为了解决上述这些痛点,车辆主动安全系统开始茁壮成长,这个家族当前最耀眼的明星非已经广泛应用但依旧青涩的AEB莫属,关于AEB的科普可详见这两篇文章《AEBS,自动驾驶演艺圈喜欢喊“卡”的导演》和《AEB的“难言之隐”》。
AEB映射到人类驾驶员的避撞行为就是制动,属于纵向避撞逻辑。可除了制动减速,人类驾驶员避撞还有另一种选择:转向改变行驶路径,属于横向避撞逻辑,这个对应主动安全策略就是紧急转向避撞。
01 为什么需要紧急转向避撞
或许有人会疑惑,面对前方存在碰撞风险的障碍物,通过制动减速避撞难道还不够吗,为什么还需要通过转向进行避撞呢?紧急转向避撞时,对于挂车这类商用车,转向角度或者转向角速度控制不好,还会引起侧翻,给其他车辆带来更大的碰撞风险。
要回答上述问题,我们还需要从场景的角度进行解释:
(1)大陆公司曾做过一个调查,典型乘用车在干燥路面上以100km/h的速度行驶时,要想通过制动使车停下来,最少必须在障碍物前40m进行制动。与此不同,在不使用制动而只使用转向时,即使距离障碍物只有28m,仍可通过转向完成碰撞。因此,通过转向实现避撞要比通过制动实现避撞具有更短的纵向距离要求,直白一点表达就是:在通过制动已无法避免碰撞的场景,通过转向仍可避免碰撞。
(2)车辆在高速行驶时,面对前方存在碰撞风险的障碍物,如果采取紧急制动策略,则有可能带来更严重的连续追尾事故。有鉴于此,市面上多数AEB产品采用减速量达到一定值(比如>60km/h)即退出的策略,退出之后是选择制动还是转向,由驾驶员决定。如果高速场景采用转向避撞,不仅可以避免正面碰撞,还可以避免被追尾,还不需要驾驶员在紧急情况下做出决定,可谓一举三得。
(3)人类驾驶员在面对前方存在碰撞风险的障碍物,通过转向进行避撞时,确实存在由于控制不好转向角度和转向角速度,导致车辆发生侧翻。但是当人类驾驶员换成驾驶自动化系统后,系统可以基于车辆状态,结合专家经验下发合适的转向角速和转向叫嘟嘟,从而避免侧翻事故发生。
因此,在部分碰撞风险场景下,转向要比制动具有更好的避免碰撞或者降低碰撞伤害效果。
02 什么是紧急转向避撞
紧急转向避撞策略包含两种,一种是急转向辅助(Emergency Steering Assist,ESA),一钟是自动紧急转向(Autonomous Emergency Steering,AES)。
EAS在《GBT 39263-2020 道路车辆 先进驾驶辅助系统( ADAS)术语及定义》中的定义为:实时检测车辆前方、侧方及侧后方行驶环境,在可能发生碰撞风险且驾驶员有明确的转向意图时辅助驾驶员进行转向操作。
按照是否跨越车道线,ESA还可以分为车道内转向避撞和车道外转向避撞两种,车道内转向避撞主要针对的是车辆/行人/两轮车等目标物占据自车车道一部分,自车车道剩余宽度允许自车通行的场景,如图1左图所示。车道外转向避避撞主要针对的是车辆/行人/两轮车等目标物占据自车车道且剩余宽度不允许自车通行的场景,如图1右图所示。
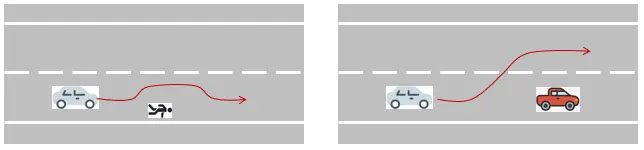
图1 车道内避撞和车道外避撞场景
从功能实现整体难度上讲,车道内转向避撞的难度要低一点,因为在此种场景下,自车不越过车道线,理论上自车不需要去判断相邻车道前后车是否具有安全的变道空间,只需要做好前向感知即可。此外,从避撞路径规划及整车控制层面来讲,车道内避撞的实现难度也较车道外避撞难度要低一点。但是车道内避撞的障碍物常为行人、两轮车,这对感知识别的能力要求要更高一点。
ESA功能的上车有一段历史了,但是各主机厂对ESA的理解不尽相同,这样导致虽然都叫ESA,但是实现的功能却不尽相同,下面我们选取几家ESA产品进行简单介绍。
2018年的,福特在全球范围内正式推出Co-Pilot360™智行驾驶辅助系统,其中就包括ESA,官方对这一功能的介绍是:如果前方突发危险状况,福特ESA可以在AEB自动刹车触发时调整转向力,帮助老司机敏捷地绕过占道车辆,继续前行。
ESA激活的前提是AEB激活,且之后如果检测到驾驶员打方向盘,ESA根据打方向的快慢,相应调节方向盘的轻重,避免在紧急情况下车辆跑偏及碰撞。如果驾驶员打的力度过快,ESA会相应的调重方向盘的力度;当转向打力度过慢,ESA会相应调轻方向盘的力度。
今天我们再打开福特官网上关于ESA的介绍,已经变成图2的模样。此时的ESA不再是只会调节转向力的小屁孩,而是会主动探测碰撞风险,主动通过声光电先给出避撞建议,如果识别到驾驶员按照建议轻打方向盘,那么ESA将施加一个转向力矩,来帮助驾驶员完成转向避撞。
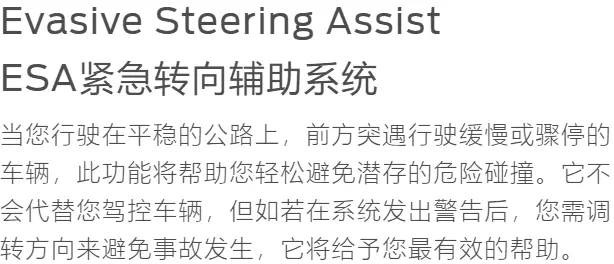
图2 福特ESA功能介绍
2019年,吉利新车型星越L上也紧急避障转向辅助EMA功能,此EMA在检测到驾驶员意图通过转向来进行避让,且驾驶员转向操控不足以避免碰撞发生时,通过加强转向输入来发挥作用。在加强转向输入的同时,如果驾驶员意图回到原车道,该功能还有助于在路过障碍物后再次回正车辆。这和福特2018年推出的ESA功能基本类似,都是在检测到驾驶员有主动转向避让操作时,且转向力不足时,对转向力进行修正。
2019款星越L上此功能可在50~100km/h激活,到了2024款星越L,此激活车速范围变成了50~120km/h,5年将激活速度提升20km/h,由此可见此功能开发难度绝非等闲之辈。
2023年,年底上市的遥遥领先M9上,也配置了此功能,图3为官网上关于其ESA功能的介绍,从官方介绍里,可以看到问界M9的ESA功能也是辅助加大转向力矩,和上面介绍的福特ESA以及星越L ESA基本类似,但具体实现方式如何,我们还不得而知,毕竟这项功能要等2024年第二季度通过OTA才能推送到用户手中。

图3 问界M9关于ESA功能的介绍
最后介绍一下2024年刚刚上市的第九代凯美瑞上的ESA,官方介绍的一个应用场景,如图4所示:人类驾驶员发现车道内有行人时,为了安全起见都会向没人的方向打一点转向,保证行车安全。如果这个人类驾驶员是新手司机,对距离把握不准,那么就可能出现转向过大导致超出本车道,这个时候ESA会帮助驾驶员调节合适的转向力,让车辆保持在当前车道内安全行驶。

图4 第九代凯美瑞ESA功能场景
凯美瑞的这个ESA系统,主要用来修正转向力,防止紧急转向过程车辆偏离车道,发生其他碰撞风险,ESA系统不生不具备主动发现障碍物,主动提示避撞,主动执行避撞的能力。
从上面几家的ESA产品可以看出,当前的ESA主要还处在修正驾驶员转向力的阶段,在紧急碰撞风险场景(例如通过TTC<阈值进行判断),检测到驾驶员有通过转向进行避撞的意图,如果驾驶员转向过大超过侧翻阈值,那么ESA介入适当降低转向力矩,如果驾驶员转向过小不足以避障,那么ESA介入适当增加转向力矩。这其实时国标中关于ESA的理想状态还有一定差距。
介绍完ESA,我们再聊一聊研究得火热的AES。
AES在《GBT 39263-2020 道路车辆 先进驾驶辅助系统( ADAS)术语及定义》中的定义为:实时监测车辆前方、侧方和侧方行驶环境,在可能发生碰撞危险时自动控制车辆转向,以避免碰撞或减轻碰撞后果。
从定义上看,AES和ESA最大的区别就是不需要驾驶员进行确认触发了,看似区别不大,实则有L2和L4区别那么大,毕竟AES需要像人一样去发现风险,并自主做出对避障最有利的策略。
AEB属于横向避撞策略,AES属于纵向避撞策略,这两个功能未来必将集成在一起,成为一个保护车内和车外行人的更安全、更可靠的前向避撞系统,那么集成后的系统,什么时候触发AEB、什么时候触发AES、是带着制动触发AES、还是释放制动触发AES,需要基于前向目标类型,与前向目标距离,后向目标类型,与后向目标距离,相邻车道变道安全空间大小等因素综合考虑。
AES可谓任重而道远。
03 小结
最近越来越觉得,主动安全是一个可以建立极大竞争壁垒的领域,满足法规要求的一个可用主动安全功能可能不难,但是满足复杂场景的一个好用主动安全功能实在太难。在这里没有花里胡哨的算法,也挖掘不出耳目一新的买点,有的只是日复一日理解场景、挖掘场景、收集数据、迭代功能。
- 下一篇:电源完整性仿真域之仿真软件(附下载)
- 上一篇:制动噪声



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
