




 广告
广告





















































怎样进行新能源汽车CAN总线的故障定位与干扰排除?

CAN总线通讯是我们每天都会使用的工业通讯总线,工程师经常会遇到各种由于CAN总线通讯异常导致的问题。这篇文章将会带您了解怎么进行新能源汽车CAN总线的故障定位与干扰排除。
01 新能源汽车的未来发展
现在大数据、物联网、智能家居等概念已经渗透进了千家万户,也渗透到了汽车工业的未来,典型例子就是汽车的自动化驾驶。
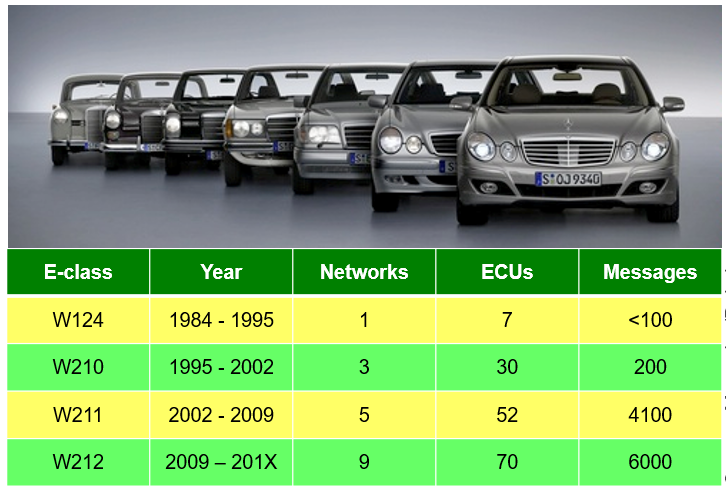
▲ 图1 车辆内通讯量随年份变化表
如图1所示,随着车辆实现的功能逐渐增多,整车的网络也越来越复杂,需要进行的通讯量也随着暴涨。为了面对数据传输量的暴增,未来新能源汽车将会逐步从现在有的CAN总线通讯逐步升级到CAN FD,来应对该变化。
02 CAN总线故障定位
CAN总线的故障问题绝大多数都是由于物理层传输出现问题导致的,所以为了对CAN总线故障定位,就需要对CAN总线的报文进行分析。
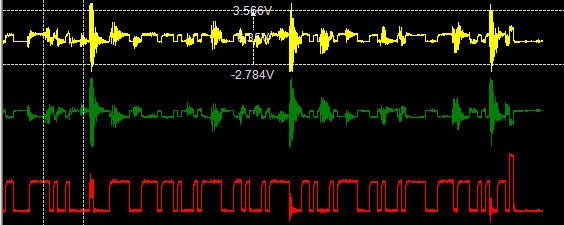
▲ 图2 CAN总线异常状态波形图
新能源汽车中常见的问题是干扰问题。如图2所示是使用我司CANScope总线分析仪捕获到的某车辆通讯的波形,在进行CAN总线故障定位时,要根据波形情况来判定异常干扰的原因。
可以看到在CAN_H和CAN_L上均有异常共模信号叠加,所以针对异常共模信号做FFT频谱分析,帮助用户快速定位共模干扰频率。
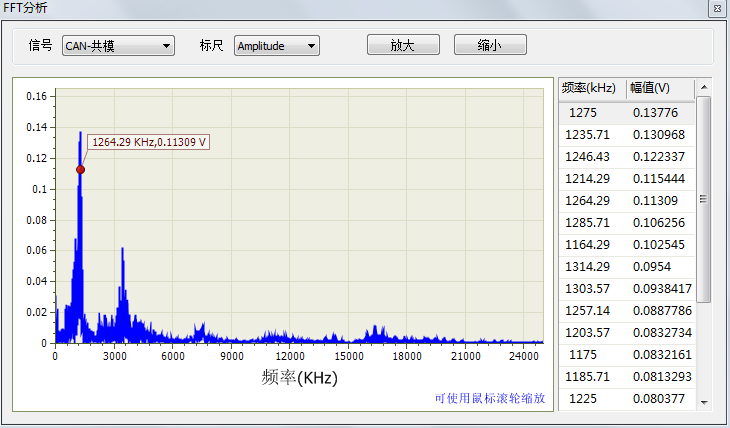
▲ 图3 FFT分析结果
如图3所示为FFT分析结果,可以看到干扰主要集中在1264KHz附近,证明在该CAN总线网络中有某个节点产生了这个频率的信号,串扰进了CAN总线网络中,导致总线通讯发生异常。
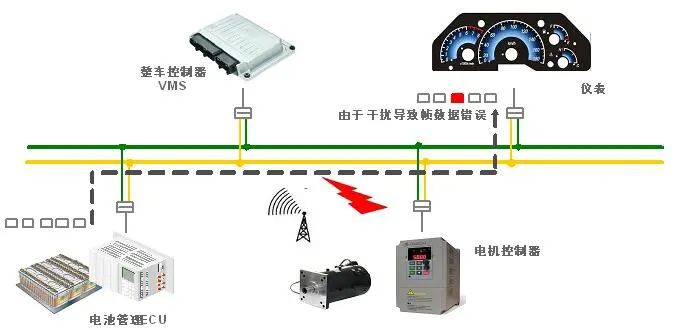
▲ 图4 CAN总线网络示例图
如图4所示为该CAN总线网络的示例图,针对每个节点进行测试后发现该共模干扰频率与逆变器频率吻合,最终确定是由于逆变器信号串扰进入总线导致通讯异常。
03 干扰排除方法
当我们确定了CAN总线的故障原因以后,需要进行干扰排除,那么下面将介绍常用的抗干扰解决方案。
① 增加隔离模块
干扰不但影响信号,更严重的会导致板子死机或者烧毁,所以接口和电源的隔离是抗干扰的第一步。隔离的主要目的是:避免地回流烧毁电路板和限制干扰的幅度。如图5所示,未隔离时,两个节点的地电位不一致,导致有回流电流,产生共模信号,CAN的抗共模干扰能力是-12~7V,超过这个差值则出现错误,如果共模差超过±36V,烧毁收发器或者电路板。增加CTM隔离模块后,就隔绝了地回流,限制了干扰幅度,增加了总线抗干扰性。
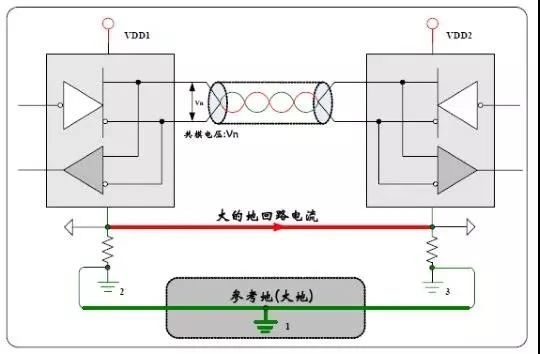
▲ 图5 差分抗干扰示意图
② 增加双绞程度
CAN总线为了提高抗干扰能力,采用CANH和CANL差分传输,达到效果就是遇到干扰后,可以“同上同下”,最后CANH-CANL的差分值保持不变。如图6所示。
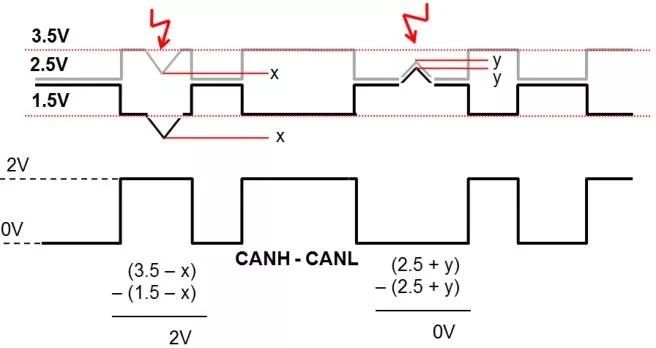
▲ 图6 差分抗干扰示意图
CANH和CANL要紧密地绞在一起,通常双绞线只有33绞/米,而在强干扰场合,双绞程度要到45-55绞/米才能达到较好的抗干扰效果。
③ CAN线保证屏蔽效果与正确接地
带屏蔽层的CAN线,可以良好地抵御电场的干扰,等于整个屏蔽层是一个等势体,避免CAN导线受到干扰。如图7所示,为一个标准的屏蔽双绞线,CANH和CANL通过铝箔和无氧铜丝屏蔽网包裹,如图7所示。需要注意的是和与接插件的连接,在连接部分允许有短于25 mm 的电缆不用双绞。较好的CAN屏蔽线带有2层屏蔽层,称为双层屏蔽线,其中内层的CAN_GND是与CAN收发器的地连接,外层的Shield是与外壳大地相连。

▲ 图7 屏蔽双绞线
④ CAN线远离干扰源
远离干扰源是最简单的抗干扰方法,如果CAN线与强电干扰源远离0.5米,干扰就基本影响不到了。可是在实际布线中,经常遇到空间太小而不得不和强电混在一起,如图8所示,为某新能源汽车的驱动系统,CAN线与驱动线混在一起,结果导致干扰很大。只要与CAN并行的驱动线,具备2A/秒的电流变化,就会耦合出强磁场而导致CAN线上出现干扰脉冲。所以CAN线必须要和电流会剧烈变化的线缆远离。比如继电器、电磁阀、逆变器、电机驱动线等。

▲ 图8 布线乱问题
而解决这个问题,只能尽量保证强电与弱电分开捆扎,距离上尽量远离。实在避不开,也要垂直交叉,也不能平行布线。
⑤ 增加磁环或者共模电感
使用抗干扰的磁环,目的就是削弱特定频率的干扰的影响。如图9所示,为增加磁环的效果。CAN差分线缆可以两线一起加,或者单端单独加。

▲ 图9 增加磁环
磁环的效果可以大大削减特定频率的干扰强度,在增加磁环前,需要用CANScope或者示波器FFT快速傅里叶变化功能,测试出最高干扰的频率,然后向磁环厂家定制对应频率的磁环。如图10所示。为增加磁环前和增加磁环后的FFT的结果。可以看出干扰强度明显减小。

▲ 图 10
⑥ 使用CAN网桥
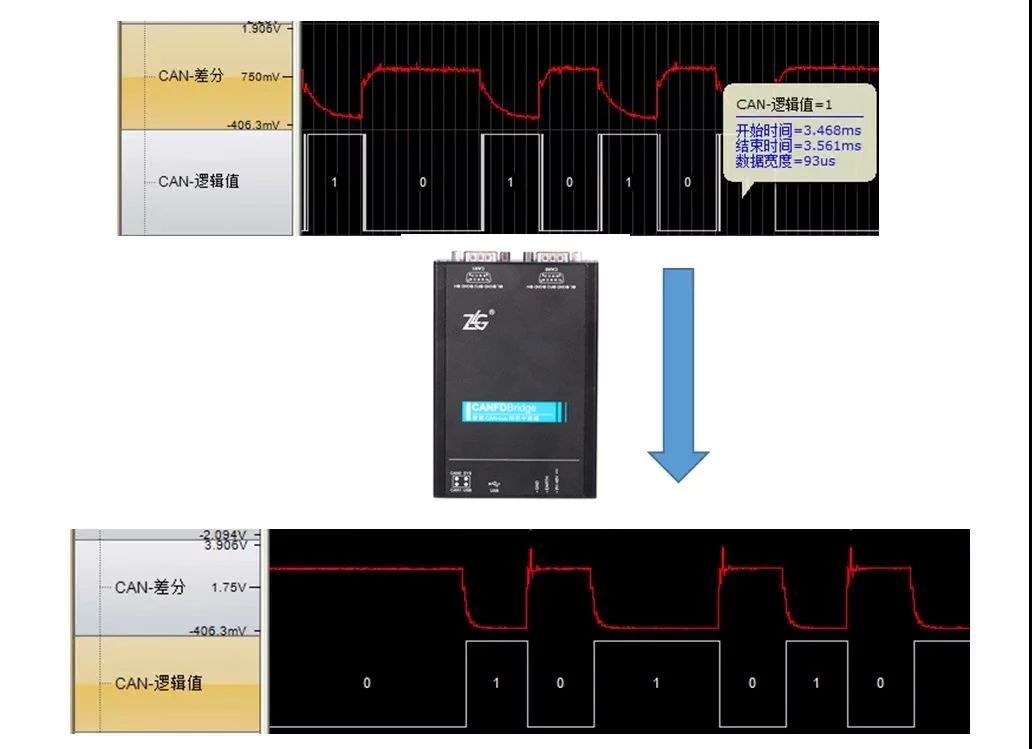
▲ 图 11 CAN网桥抗干扰示意图
通过图11可以看到,波形在经过CAN网桥之前,由于总线电容过大,下降沿变得非常缓,形成了镰刀状,这样就容易导致位采样错误。而经过CAN网桥后,报文波形经过整形后重新发出,可以看到波形整体情况良好,能够保证报文的正常收发。
04 测试解决方案
这是CAN总线的冰山模型,当前工程师只关注露出水面部分:发送是否正常和协议解析,但是底层还有很多影响的因素,如压力测试,总线延迟等。

▲ 图 12 CAN总线冰山模型
为了保证CAN总线的通讯正常,在研发测试时就需要对其进行多种测试,以增加CAN总线的鲁棒性和一致性,保证通讯正常。
① CAN总线鲁棒性测试
CANScope-Pro 专业版 CAN 分析仪具备施放错误干扰的功能,可以对某个节点或者某 个网络进行错误干扰,以验证这个节点或者系统的鲁棒性(可恢复性)。
CANScope 设备所施放的错误干扰均为“数字式”。即当已经配置好的干扰将被激发。特定的干扰脉冲破坏 CAN 报文的位逻辑信号,导致 CAN 控制器识别错误。其能量均为正常的 CAN 电压范围(5V 以内),所以不会导致设备损坏。
从 CANScope 软件主界面的“测试”选项中“错误与干扰”进入,如图 13 所示。

▲ 图13 测试_错误与干扰
弹出“错误与干扰”窗口,如图14所示。
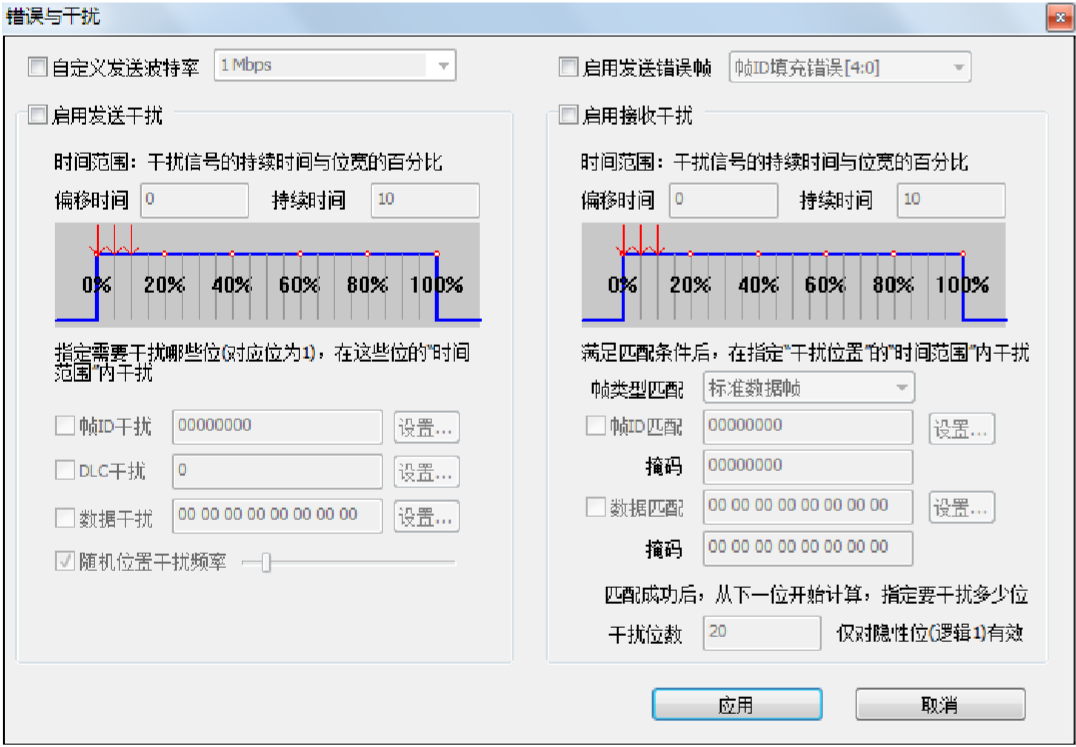
▲ 图 14
如图14所示,CANScope主要是通过多种干扰方式来对被测网络进行干扰测试,从而确定该网络的鲁棒性,干扰方式包括:
自定义发送波特率:以错误的波特率发送数据,验证被测节点或者系统是否能 自恢复(注意启用后需要在报文界面点击发送报文) ;
启用发送错误帧:在发送或者接收 CAN 帧的特定位置产生填充错误或者位错 误,从而导致错误帧(注意启用后需要在报文界面点击发送报文) ;
启用发送干扰:对由 CANScope 发送的报文进行干扰,导致被测的接收节点 由于接收错误计数器达到 255,而进入总线关闭(注意启用后需要在报文界面 点击发送报文) ;
启用接收干扰:对 CANScope 接收的报文进行干扰,导致被测的发送节点由 于发送错误计数器达到 255,而进入总线关闭。
② CAN总线一致性测试
随着新能源、智能网联等概念发展,新能源CAN网络节点高达50个,车身CAN总线环境变得复杂及紊乱,CAN节点质量不稳定给主机厂安全性带来极大威胁。所以主机厂和零部件厂对于CAN总线的一致性要求越来越高,出厂前都要进行一致性测试。

▲ 图15 CANDT一致性测试系统
如图15所示是我司的CANDT一致性测试系统,CANDT是基于CANScope强大的CAN总线底层测试分析基础,配备必要的电压源、PLC等核心外围设备,可自动化完成汽车零部件CAN节点物理层、链路层及应用层测试的CAN一致性测试设备。物理层测试的目的是验证节点及测试系统在电路设计、物理电平特性等方面的性能,就是保证节点能够正确连入总线的基础,其测试内容包括电阻电容特性、节点差分电阻、故障容错测试、CAN线上的物理电平特性等等。数据链路层的测试目的是保证每个节点的通讯参数能够保持一致性,所组成的网络能够正常有效的工作,内容包括位定时测试、采样点测试、SJW测试等等。
如图16所示,CAN一致性测试系统以ISO11898标准为核心,围绕国内主流新能源主机厂CAN总线测试标准为主要依据,测试功能满足物理层、链路层、应用层的测试需求。
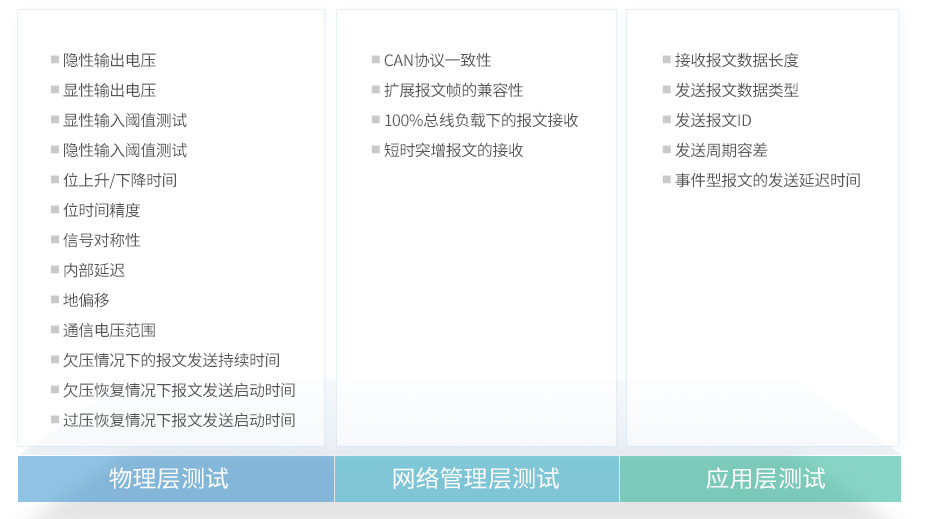
▲ 图16 CANDT一致性测试系统测试项目
总结
对于CAN总线报文错误来说,百分之90的错误都来自于物理层,而CANScope总线分析仪可以对CAN 波形与报文同步发送和接收,快速对CAN总线进行各项测试,帮助工程师们快速完成故障定位和问题排查。







最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
