




 广告
广告





















































哪些车企已经掌握了“坦克掉头”技术,如何开展台架测试?

汽车“坦克掉头”功能是指车辆通过控制外侧车轮正传,内侧车轮反转,像坦克一样实现原地转向或掉头。
随着汽车行业电动化及智能化的发展,“坦克掉头”技术能已实现量产落地,其功能的主要应用意义就是在愈发紧凑的城市用车场景下,提高未来汽车的操控灵活度,也为全自动驾驶打下技术根基,其功能拥有更具广阔的应用空间。
1、汽车为什么不能像坦克那样原地转弯?
坦克转弯是通过两侧履带的差速实现的,其原理是通过锁住一侧的履带,靠另一侧履带正常驱动,让其以单侧履带为中心完成转弯;或者是通过控制两侧履带往相反方向驱动,从而使其能以车辆中心为原点实现原地360°转弯,转弯半径为零米。

坦克原地转弯
汽车原地转向是指汽车在原地完成转向操作,而不需要前进或倒退行驶。这种技术通常在狭窄的空间或者需要快速掉头的情况下使用,例如在停车场或者城市狭窄的街道上。
汽车原地转向的技术原理是通过车轮转向和不对称差速器的协同作用来实现。当车轮转向时,内侧车轮和外侧车轮行驶的距离不同,导致内侧车轮的行驶速度比外侧车轮慢,这时不对称差速器就会发挥作用,将转向力量转移到速度较慢的内侧车轮上,从而使车辆实现原地转向。
早期的汽车转向普遍是采用机械式齿轮齿条转向结构,当转动方向盘时,转向齿轮会带动齿条左右移动从而实现转向,这种转向结构具有成本低,安全可靠等优点,起缺点是转向费力。
随着汽车技术的发展,液压转向助力装置解决了转向费力这一痛点。
随着电子技术的发展,出现了电子助力转向装置,通过扭力传感器自动施加助力,让汽车转向更加轻松和安全。

汽车转向装置
总而言之,坦克和履带车辆都是通过两侧速度差进行转弯和调头的,可以原地调头和转向。
轮式车辆要实现“坦克调头”,设计复杂、成本高,且转弯舒适性和线性较差,经济性不如前轮直接转向。
2、哪些车企已经掌握了汽车原地转向技术?
而随着新能源的技术发展逐渐成熟,电动四驱的技术从理念达到了量产化的运用,电动四驱可以省去传统的传动系统,释放驾驶室空间,车内空间布局更加自由。
目前,传统的集中式驱动系统逐渐开始向分布式驱动系统发展,并逐步实现四个车轮之间扭矩大小和方向上的解耦。
实现车辆四个车轮的独立控制一般有『轮毂电机驱动』与『轮边电机驱动』两种方案。
『轮毂电机』将动力装置和传动装置都整合到轮毂内,将电动车辆的机械部分大大简化,取消半轴、万向节、差速器、变速器等传动部件。

轮毂电机机构示意图
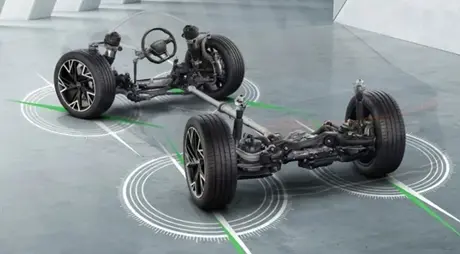
『轮边电机』轮边电机拥有四个独立驱动的电机,位于车轮外部,动力通过轮边减速器传递至车轮,取消传动轴和差速器,只需要电机和与之配套的电控和变速器等各种驱动系统,同时其还能够各自独立控制四个车轮,基于四电机矢量控制更精准地控制车身姿态,优点是系统效率高、能耗低、使用成本低。

比亚迪轮边电机驱动架构
目前,实现车辆原地转向的车型主要有比亚迪仰望U8、RIVIANR1T、奔驰EQG、极氪001fr以及现代IonIQ 5。
比亚迪仰望U8:在易四方平台上将底盘域和动力域的高度融合,原地掉头能够精准控制角度和转速,且已实现量产。
易四方平台技术对汽车电气结构是一次颠覆性的升级,远不止是原地掉头这么简单,能实现极限远高于燃油汽车和传统新能源汽车的ABS、ESC、主动安全、四轮驱动、线控转向等功能。
比亚迪仰望U8原地转向
奔驰EQG:第一次在沙地测试,第二次在洒了水的铺装路面测试,旋转速度较快且有偏移。
在附着力比较低的沙土路面上进行演示,即便在掉头时,某个轮胎的动力输出不够精准,最多也只会导致车轮打滑或空转,但在高附着路面上车轮难以打滑,很可能会失控引起危险。

RIVIAN R1T:只发布了样车,最终没有上市发售。

RIVIANR1T原地转向
比亚迪仰望U8、RIVIAN R1T、奔驰EQG、极氪001fr都采用『轮边电机』控制技术,每一个车轮都配备独立的动力源;而现代IonIQ 5采用『轮毂电机』控制技术,为前后轴都配备了近90度的转向装置,不仅可以完成原地掉头,更可像螃蟹一样横着走。
现代IonIQ 5:将车轮的悬架、制动和转向组合成一个独立组件连接到轮毂电机上,但还没有搭载量产车上,只是作为一辆技术进行了展示。

现代IONIQ5原地掉头
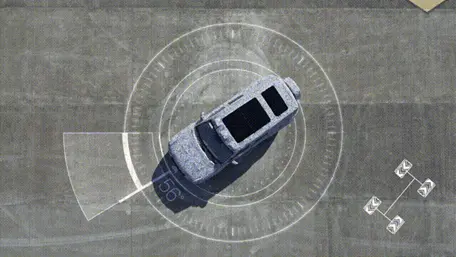
极氪001fr:搭载了纯电性能的黑科技—ZVC极氪扭矩矢量控制,四轮扭矩矢量控制系统实时监测四个电机转速,通过智能算法,精准分配、独立控制每个车轮的扭矩输出。
极氪001fr
3、原地转向技术如何测试?
汽车原地转向功能是指车辆搭载由四电机组成的驱动系统,实现四轮扭矩矢量控制,通过控制外侧车轮正传,内侧车轮反转,实现原地转向或掉头。可以提高车辆的灵活性,掉头范围更小,适应狭窄场地和拥堵环境的驾驶需求,使自动驾驶车辆获得更高的环境适应能力。
基于汽车原地转向功能的原地转向技术测试前期通过台架开展功能性验证和标定,后期再上实车进行路试。
原地转向技术测试:以前驱动轴或后驱动轴为例,在总成台架上表现为两根半轴以相反的方向旋转,同侧扭矩和转速方向相同。
原地转向的电驱动总成为双电机结构,其测试台架主控系统需实现两个测功机等速但相反方向控制,同侧扭矩和转速方向相同。
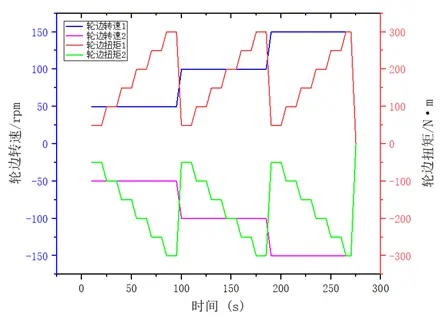
双电机测试
原地转向技术测试设备为电驱动总成测试台架,主要包括电力测功机、变频柜、上位机控系统、HIL系统,电池模拟器、功率分析仪、水冷设备等。
理论上来说,随便搞个四电机的车型,设定一套专门的原地转向程序实现看似一样的功能确实不难。但传统汽车产业链里ESC和动力是分属不同企业的,这种需要制动和动力精密配合的功能。
汽车原地转向在狭窄的道路、拥堵的城市停车位等特殊场景下,这项功能可以提供极大的便利性和实用性。看起来很容易,原理也很明确,但却不是那么容易实现的,要实现精准控制就更是难上加难。
汽车原地转向功能在某种意义上也代表了企业在技术投入上的不同态度,也是在底盘技术高低上的分水岭。
从技术角度看,原地掉头功能的实现反映了在新能源驱动技术上的深厚积累,也代表了新能源汽车技术发展的新趋势,也是中国新能源汽车技术进步和中国汽车品牌在高端市场的成功突破的一个重要标志。







最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
