




 广告
广告





















































欧洲自动驾驶及高级辅助驾驶系统发展趋势

欧洲迈向自动驾驶
世界各地为实现自动驾驶做了大量工作,欧洲国家正在通过单个国家层面和整个欧盟 (EU) 的一系列战略来参与研发 (R&D)。这项研发旨在为驾驶员提供更好的生活质量(QoL),减少人为错误造成的重大事故,为逐渐老龄化的驾驶人群和对驾驶缺乏信心的人提供替代方案,使交通合理化减少大气污染排放,并把浪费在交通堵塞中的时间腾出来,用于阅读、写作、浏览互联网等兴趣。尽管日本收到了大量有关这方面的信息,尤其是德国制造商发布的有关自动驾驶开发的消息,但其他欧洲国家旨在实现自动驾驶的开发也在稳步进展。
在瑞典,公共和私营部门联合开展的“Drive me”项目涉及在自动驾驶和非自动驾驶车辆共享道路的混合交通环境中进行大规模试验。配备相当于4级自动驾驶功能的车辆(仅限于普通公共道路的特定路段)向公众出租。希望该项目能够在以下方面阐明自动驾驶系统与人之间的关系:
1)坐在方向盘后面的驾驶员如何对配备自动驾驶的车辆的决策和行动做出反应;
2)驾驶员如何附近非自动驾驶车辆的反应;
3) 当系统将控制权交还给驾驶员时,例如当车辆到达允许自动驾驶的路段尽头时,或者在特别恶劣的天气条件下,驾驶员如何反应。
与此同时,在英国,交通部启动了无人驾驶汽车项目,以实现自动驾驶。旨在长期实现完全自动驾驶的开发工作正在基于一项行动计划进行,该计划涉及逐步制定在英国进行自动驾驶试验的要求,澄清英国有问题的法规以及在可能的情况下修订这些法规的可能性,并澄清国际上有问题的法规并整理必要的改变。
在政府机构发挥核心作用的情况下,荷兰正在研究自动驾驶汽车与基础设施之间的关系,构建汽车对汽车和汽车对基础设施的通信系统,并积极研究测试和认证自动驾驶汽车安全性的方案,配备自动驾驶车辆。
除了这些国家级举措外,各种工业-政府-学术界联合项目正在通过“地平线2020”框架进行,以鼓励整个欧洲的新研发和创新。
智能汽车自动驾驶应用和技术 (AdaptIVe) 项目是在第七研究和技术开发框架计划 (FP7) 下进行的,其预算为 2500 万欧元,从2014年1月到2017年6月运行了42个月,由8个国家(法国、德国、希腊、意大利、西班牙、瑞典、荷兰、英国)28个项目成员大规模综合研发。该项目定义了自动驾驶的典型用例,涵盖高速公路和普通城市道路上的驾驶、停车和交通拥堵,并研究和开发实现这些用例所需的技术。它对演示车辆进行了测试,并扩展到整理必要的法律。该项目成果有望为自动驾驶未来发展提供重要参考。
与此同时,除了德国大型汽车公司的行业协会收购了自动驾驶所需的高精度地图供应商之外,围绕人工智能(AI)的国际联盟也出现了剧变。这样,各国之间、汽车制造商之间以及汽车行业传统边界之外的技术发展都在自动驾驶方面取得了快速进展。并行进行的业务计划重组也是如此。
欧洲 ADAS 趋势

高级驾驶辅助系统 (ADAS) 在汽车工程师协会 (SAE) 定义的自动驾驶级别中被归类为 2 级或更低级别,正在作为支持更高级别自动驾驶的基础技术被引入。随着驾驶公众的意识不断增强,碰撞缓解制动系统的普及尤其迅速。然而,用于实现碰撞缓解制动的系统配置差异很大,包括分别使用红外、单目摄像头或立体摄像头的系统,以及混合使用摄像头和毫米波雷达的系统。
当然,不同的系统配置在其可以运行的车速、控制范围以及有效情况方面具有不同的限制。这使得普通驾驶员很难理解这些区别并评估它们的相对价值。这导致系统由欧洲新车评估计划 (Euro NCAP) 进行评估,该计划是一个独立于汽车制造商和汽车行业其他公司的消费者组织。Euro NCAP 对欧洲市场上销售的车辆的安全性进行了评级,以星星的数量来表示,并且易于理解。迄今为止,评估的重点是ADAS在碰撞中的安全性能(即所谓的被动安全性),并且结果已被广泛发表。然而,由于认识到评估不同系统配置的难度,从 2013 年起,对归类为主动安全系统的 ADAS 增加了新的评估,首先是碰撞缓解制动系统。Euro NCAP 评级已以多种形式直接或间接引用,包括记者文章、技术出版物和新闻稿。由于评级现在对购买者行为产生重大影响,因此汽车行业的公司无法忽视这一领域的发展。
最近,Euro NCAP 的覆盖范围不仅限于车辆乘客,还包括行人和骑自行车的人等弱势道路使用者。这些新协议将对新 ADAS 系统的设计产生重大影响。因此,为了积极预测新 ADAS 系统的到来,积极参与新评估的制定非常重要,而不是被动观察趋势(见图 2)。
欧洲国家实现自动驾驶面临的挑战
如前所述,每个欧洲国家都面临着其特定的挑战。这些挑战的局部性使得很难被像 Euroncap 这样的总体趋势所涵盖。
例如,人们在法国城市地区开车时经常遇到的情况是,摩托车以危险的速度在陷入交通堵塞的车辆和在旅游景点周围穿行的骑自行车的人之间穿梭。这些混乱的情况意味着设计系统来防止这些情况将是一个挑战。同样,购物之旅通常需要驾车绕城市街道寻找路边停车位。即使驾驶员很幸运地找到了某个地方,他也需要当场决定车辆是否适合在非常小的可用空间中,并且需要具备快速操纵车辆的驾驶技能进去。
另一方面,在德国,部分高速公路没有速度限制,驾驶员有多种速度选择,导致车辆之间的速度差异非常大。一个这样的例子是,一辆以超过 200 公里/小时的速度在快车道上行驶的车辆,在意外改变到同一车道时遇到另一辆以大约 100 公里/小时的速度行驶的车辆。在这种情况下,两辆车的相对速度为 100 公里/小时。在日本,这相当于在高速公路上以 100 公里/小时的速度行驶时突然看到前方车道上有一辆停下的车辆。诸如此类的情况需要传感器能够在更远的范围内执行准确的传感。此外,高速公路的速度限制根据拥堵程度而因车道而异,并且该信息显示在电子标牌上。看不到限速标志可能会导致不知道最大允许速度。还需要一种能够收集和解释道路标记等信息的技术,这些信息有时甚至会让人类驾驶员感到困惑,在高速公路和普通道路上经常遇到的路段上,这些路段正在进行维护工作,并且白色道路显示原始车道的线与显示道路施工期间使用的临时车道的橙色线以复杂的方式重叠。
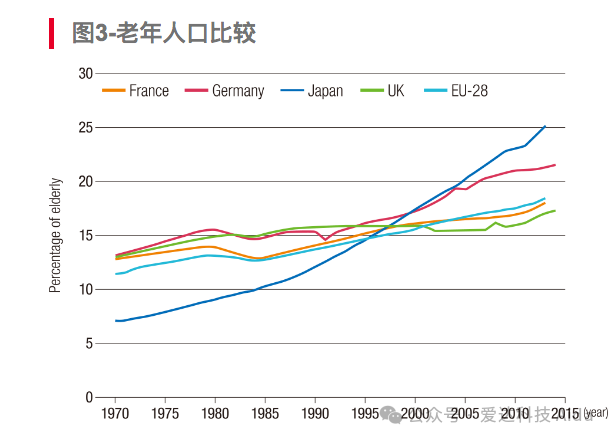
另一方面,如图 3 所示,即使按照欧盟标准,德国老年人口比例也越来越高。这导致了与日本类似的问题,包括老年司机在高速公路上逆行(德国人俗称“geister-fahrer”,意思是“幽灵司机”),以及因误踩油门而导致的事故增加用于制动踏板。
看看北欧国家,他们的高纬度意味着全年太阳的角度都比日本低。特别是在冬季,由于阳光几乎呈水平角度,因此摄像机系统会遭受严重的日晒。除此之外,长时间、大面积的积雪使得当前的摄像系统很难检测到道路上的白线,这阻碍了利用这些信息来确定车辆应该行驶在哪条车道上。
- 下一篇:新能源汽车能效高精度解析及优化
- 上一篇:新能源汽车高压线束屏蔽效能测试



编辑推荐




最新资讯
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
试验载荷谱采集
2025-04-29 11:07
-
APx500 软件演示模式 (Demo Mode) 竟有这些
2025-04-29 08:37
