




 广告
广告





















































整车下线检测:ADAS标定

术语解释
序号 术语 描述 备注1Pitch俯仰角,绕右手笛卡尔坐标系中的Y轴旋转 ;2Yaw横摆角,绕右手笛卡尔坐标系中的Z轴旋转;3Roll旋转角,绕右手笛卡尔坐标系中的X轴旋转;4FOVField Of View, 摄像头视场角;5HFOVHorizontal Field Of View, 摄像头水平视场角6VFOVVertical Field Of View, 摄像头垂直视场角7Lens摄像头镜头
一、ADAS介绍
ADAS(Advanced Driving AssistanceSystem,高级驾驶辅助系统),是利用安装在车上的各式各样的传感器(毫米波雷达、激光雷达、单\双目摄像头以及卫星导航),在汽车行驶过程中随时来感应周围的环境,收集数据,进行静态、动态物体的辨识、侦测与追踪,并结合导航仪地图数据,进行系统的运算与分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性的一类技术的统称。
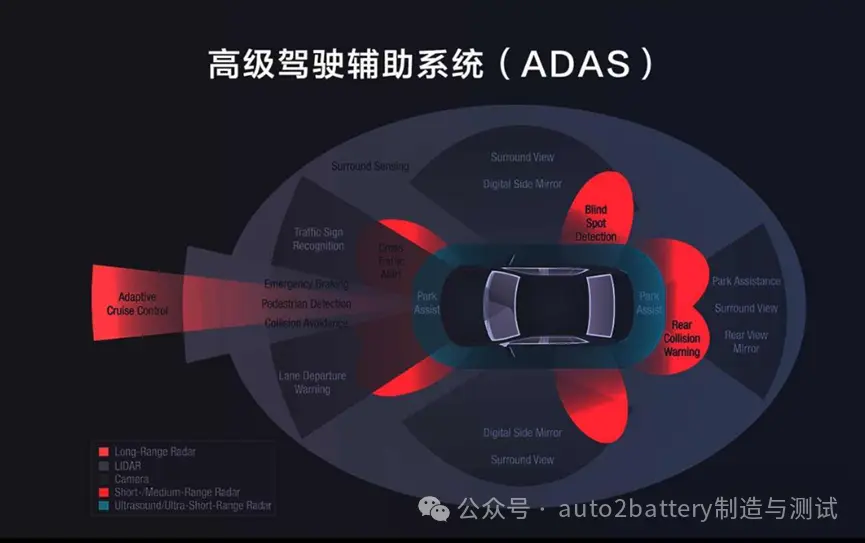
ADAS本质是辅助驾驶,核心是环境感知,主要覆盖自动驾驶的L0-L2级别,而自动驾驶则是人工智能,不过ADAS也可以视作自动驾驶汽车的前提。ADAS系统整体可分为感知层、决策层和执行层。其中感知层由雷达传感器(毫米、超声波、激光雷达)、视觉传感器(单双目摄像头、红外热成像传感器)、高精地图等构成;决策层,由芯片通过算法实现交互决策、路径规划,最终实现V2V、V2X的万物车联;执行层,通过决策实现汽车的动力转换、制动、转向及灯光效果等功能。

二、ADAS检测台组成
ADAS检测台设备主要由对中装置、轮眉高度检测相机、HUD检测设备、前后摄像头升降龙门标定靶、侧视摄像头标定靶、角雷达标定靶、前中置雷达标定靶无线OBD、检测PC系统等组成。
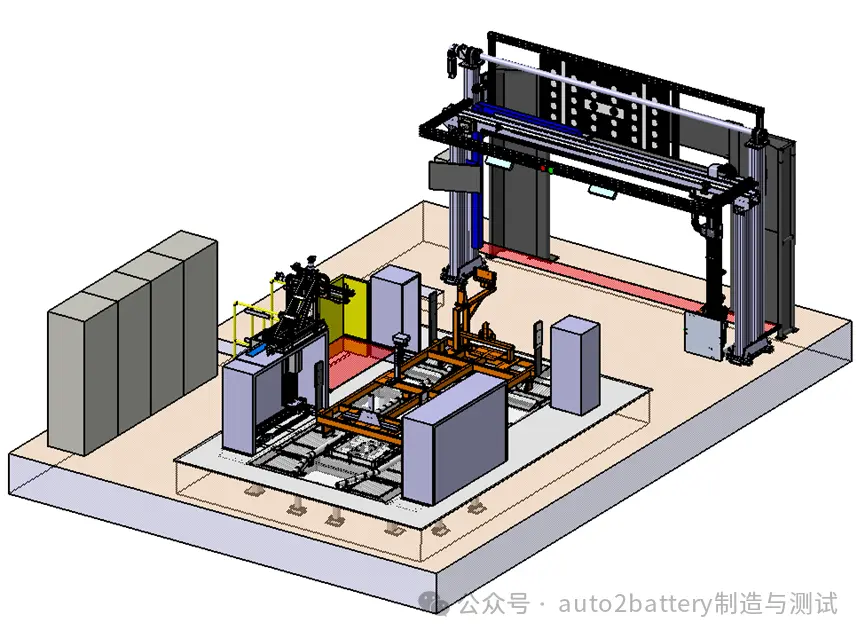
ADAS检测台
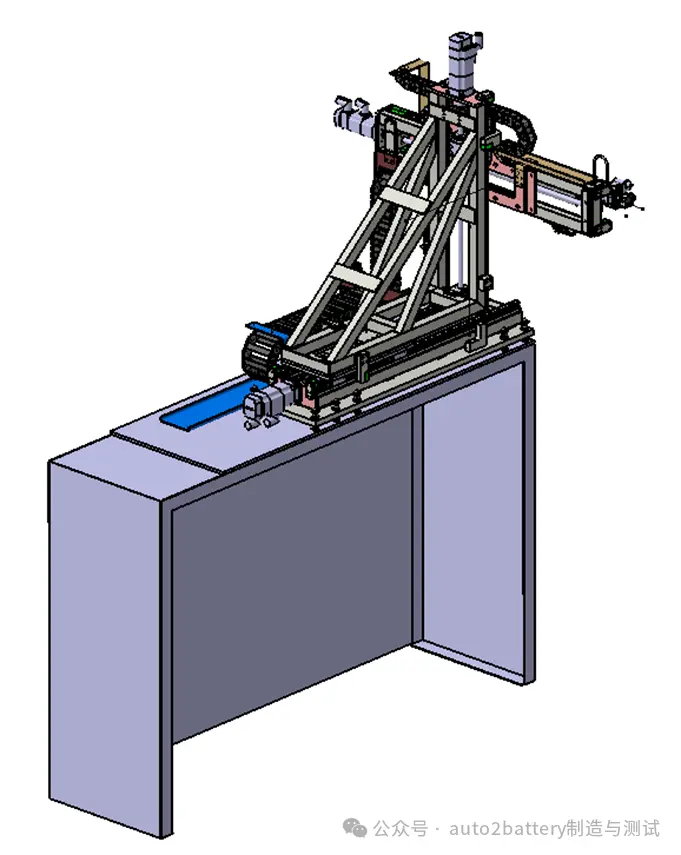
HUD检测装置
三、ADAS标定流程
3.1 标定前准备工作
1) 确认摄像头表面无保护膜以及无附着物(水滴,泥浆等)。2)打开外后视镜,保证外后视镜处于正常展开状态。3)确认空气悬架等级是否为Normal模式,车辆空载,不允许坐人。4)确认周围是否有强光源干扰摄像头。5)确认后备箱、车门没有打开。
3.2 标定
在工厂实际量产时,需要对组装完成的ADAS模块进行自动标定校正,以便系统能够优化图像拼接效果;而传统的标定方式是基于标定场地、标定布以及车载摄像头进行的实车标定。
实车标定流程基本如下:
1)车辆进入测试工位,并摆正;2)连接OBD插头,进行ADAS数据读取工作;3)ADAS数据读取完毕,进行数据计算,并ADAS进行标定;4)ADAS数据标定数据写回ECU;5)本地保存log及数据;
6)拔出诊断OBD插头,准备下一次检测。
试结束以后,操作人员断开测试终端与车的连接;同时测试报告被送往产品质量计算机,出现故障代码的结果将并被打印成报告。
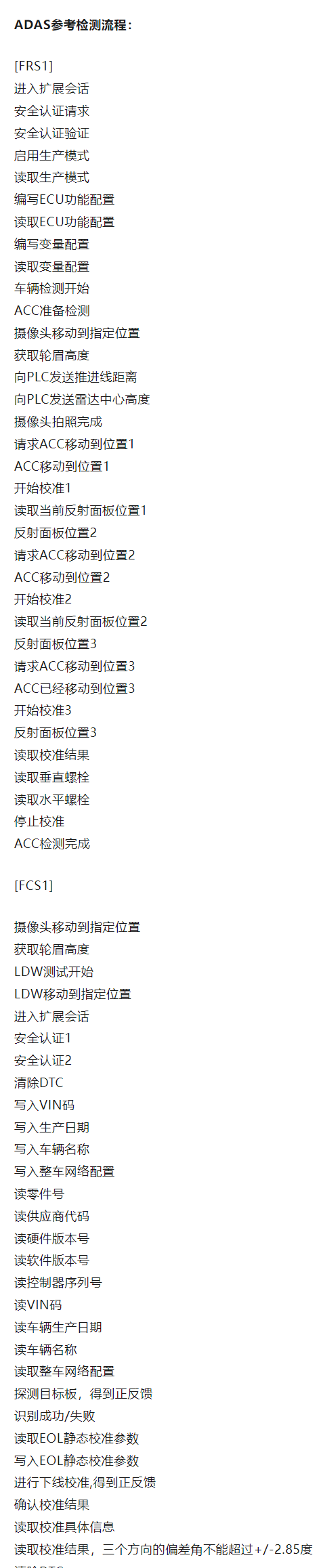
四、摄像头安装要求
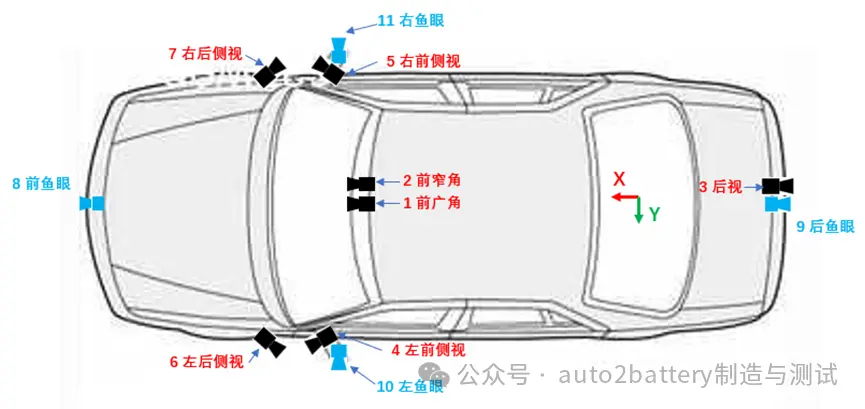
4.1 前窄角、前广角摄像头布置要求
Z向高度要求:
前窄角摄像头和前广角摄像头安装高度均为1.30~1.54m(以半载地面线计),且保持同一高度。建议安装在前挡风玻璃内正中部最顶端(安装较高位置,有利于增加摄像头可视范围);
后视镜镜座内其他部件需避让FOV;
Y向横向要求:
两摄像头Y向距离为6±0.3cm,最低可接受值为4cm;
两摄像头作为整体应居中安装;若无法避免正中,两摄像头距车身中轴(Y=0)平面均为10cm以内。
X向纵向要求:
紧贴前挡风玻璃内侧;摄像头镜头曲面与前风挡玻璃最小距离(沿玻璃法向)≤3mm(参考理想);
旋转自由度要求:
两摄像头的Pitch、Yaw、Roll均为0°;
安装角度误差:Pitch 正负1度内,Yaw正负1度以内,Roll正负0.5度以内;
其他要求:
a. SD中前广角和前窄角摄像头应看作一个整体,同时设计布置位置;建议前广角更靠近Y=0中间平面(基于外造型考虑),前窄角靠近副驾驶员侧。
b. 摄像头支架(保护罩)设计需要符合法规及车厂要求的驾驶员视线遮挡要求;
c. 两摄像头需在两雨刮器可覆盖范围内,在挡风玻璃外曲面上摄像头FOV边缘与雨刮覆盖范围边缘距离一般≥2cm,至少1cm;期望两雨刮扇形边缘在摄像头成像中被摄像头支架遮挡;
d. 避免车头、摄像头支架(保护罩)等物体在FOV视野内的遮挡;保证摄像头的HFOV不被车身遮挡;
e. 在Y=0截面的投影图中,摄像头支架对前广角摄像头VFOV的遮挡需刚好覆盖车辆机盖前缘最高点(α ≈β);减少摄像头支架单独对成像VFOV的遮挡,建议α与β均大于16度。
f. 支架内表面反射率:≤0.5%@60°入射;
g. 密封,建议等级为IP52,确保摄像头支架空间不落入灰尘、水珠;
4.2 后视摄像头布置要求
Z向高度要求:
SUV和MPV推荐安装高度为0.90~1.20m,推荐安装位置为牌照灯或扰流板。
Y向横向要求:
Y向应居中安装;若确有困难,须距车身中轴平面≤9cm。
X向纵向要求:-1.07~-0.85m
旋转自由度要求:Pitch=0°、Roll=0°、Yaw=180°,安装角度误差:pitch 正负1度内,yaw正负1度以内,roll正负0.5度以内;
其他要求:
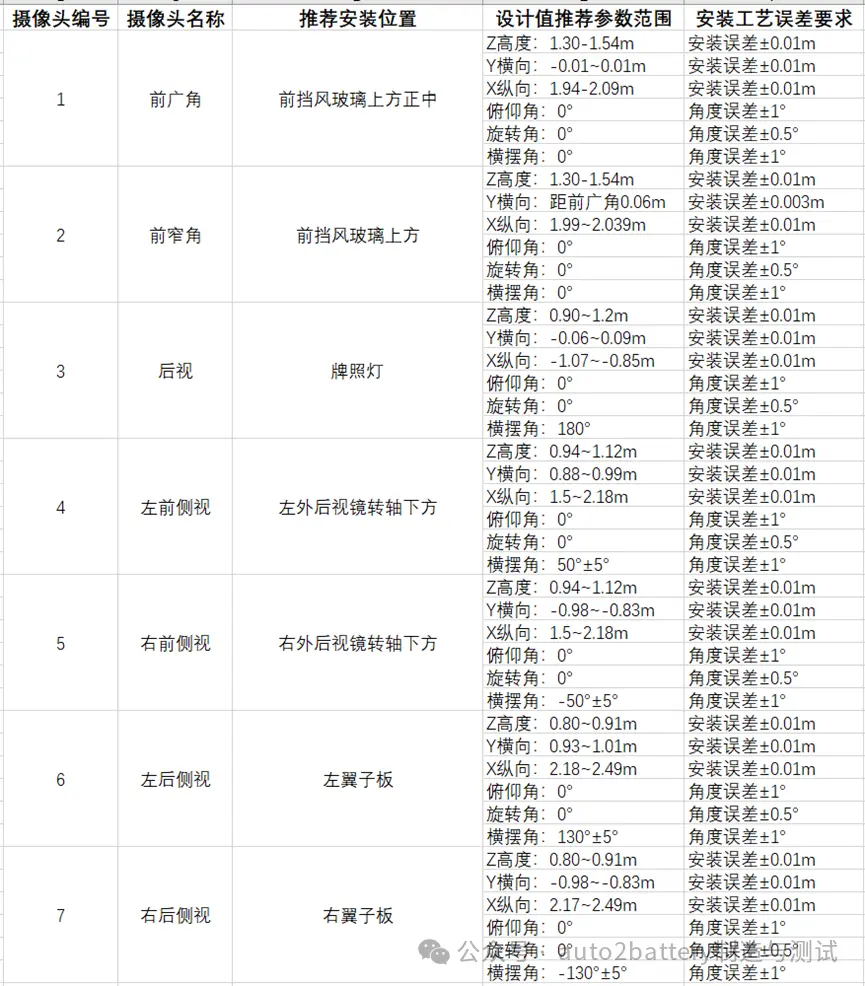
1)盲区要求:
当后视在融合后鱼眼感知条件下,后视地面水平盲区小于等于20m;
2)摄像头FOV内避免摄像头支架或者车身外饰带来的遮挡;如果存在遮挡,则不应超过全图面积5%;
3)避免后视摄像头布置低于0.5m高度;
4)镜头避免进入自车灯(横贯灯带、尾灯、刹车灯等)的覆盖范围。确有必要,采用遮光措施将自车灯边沿覆盖。
4.3 左前侧视、右前侧视、左后侧视、右后侧视摄像头布置要求
侧后视摄像头,包括车身左侧和右侧的侧后视,共2个。在确定完位置较高的侧前视摄像头布置位置后,依此为基础,确定下方的侧后视摄像头布置位置。
Z向高度要求:
摄像头安装高度范围为0.80~0.91m;侧后视摄像头一般安装位置为翼子板;
角度要求:
摄像头须水平安装,支架设计时pitch、roll必须为0;摄像头Yaw角需要与车辆前进方向夹角130度;
安装角度误差:pitch 正负1度内,yaw正负1度以内,roll正负0.5度以内;
其他要求:
1)在摄像头1920pixels对应的HFOV范围内无车身遮挡;在2048pixels对应的HFOV范围内允许部分车身遮挡,且车身遮挡角度小于10°;2)摄像头FOV内避免摄像头支架或者车身外饰带来的遮挡;
3)镜头避免进入自车灯(横贯灯带、尾灯、刹车灯等)的覆盖范围。确有必要,采用遮光措施将自车灯边沿覆盖。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
