




 广告
广告





















































FMVSS 127美国轻型车辆自动紧急制动系统法规解读及认证测试要求(中)

1.范围
2.目的
3.应用
4.定义
5.要求
6.测试条件
7.车-车测试
8.车辆-行人测试
9.误触发测试
10.测试车辆人工制动请求
7.车-车测试
7.1 设置
(a)测试区域按照图2设置。
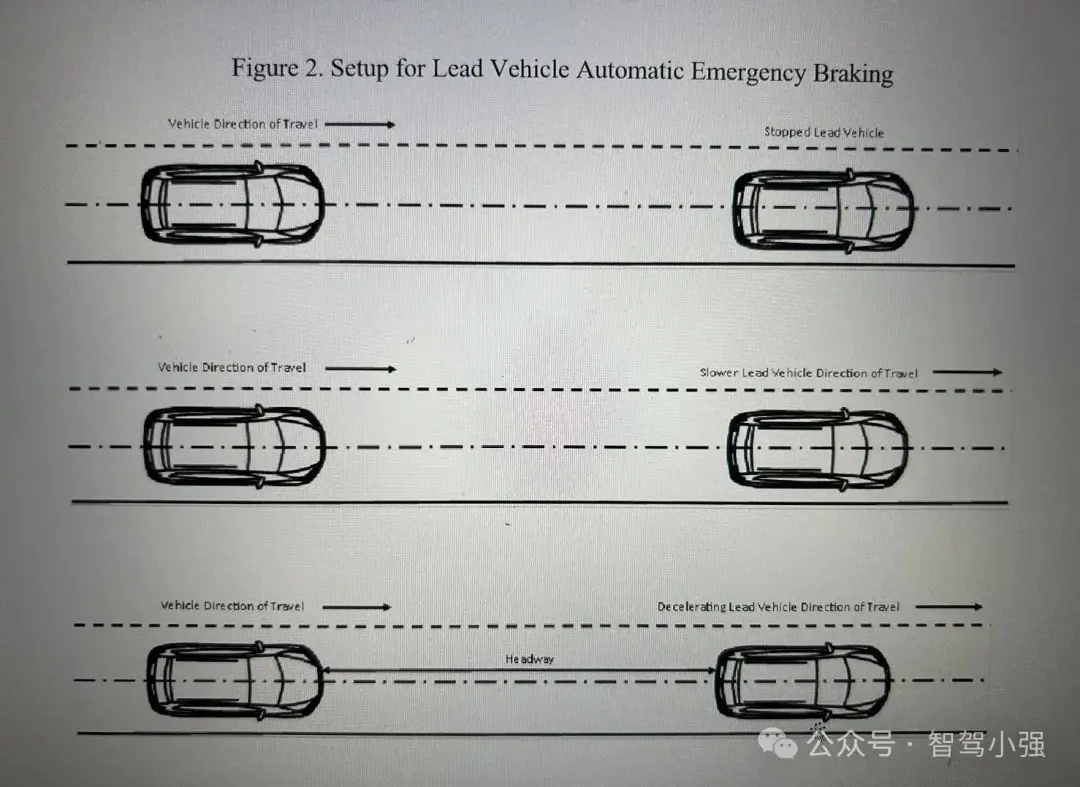
(b)测试在白天进行。
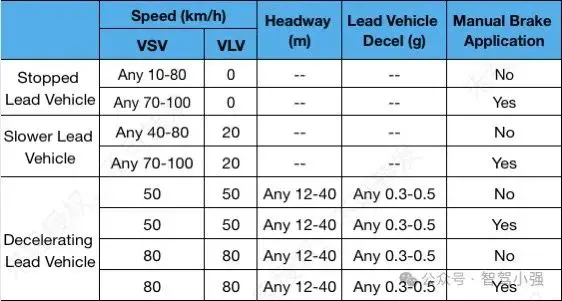
(c)作为参考,下表规定了可能进行的每个测试的测试车辆车速(VSV)、前导车辆车速(VLV)、车距和前导车辆减速。
(d)车辆的预期行进路径是从对应于车头L0的位置朝向前导车辆的直线。
(e)如果路面标有单车道线或双车道线,则预期行驶路径与最近车道线平行,且距离车道线内沿1.8m;如果路面标有与行进路径接壤的两条车道线,则预期行驶路径在两条线之间居中。
(f)对于每次进行的测试运行,将从指定的范围中选择测试车辆速度(VSV)、前导车辆速度(VLV)、车头距离和前导车辆减速。
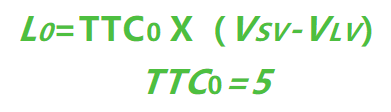
7.2 车头间距计算
对于根据7.3和7.4进行的每次测试,计算提供5秒碰撞时间(TTC0)的车头间距(L0),以米为单位。L0由以下等式确定,其中VSV是测试车辆的速度,以m/s为单位,VLV是前导车辆的速度,以m/s为单位:
7.3 停止的前导车辆
7.3.1 测试参数
(a)对于没有使用测试车辆人工制动的测试,测试车辆测试速度为10km/h至80km/h之间的任何速度,前导车辆速度为0km/h。
(b)对于使用测试车辆的人工制动的测试,测试车辆测试速度是70km/h至100km/h之间的任何速度,并且前导车辆速度为0km/h。
7.3.2 前方碰撞警告开始前的测试行为
(a)前导车辆静止放置,其纵向中心线与预定行驶路径重合。
(b)在车头间距达到L0之前,测试车辆以任何速度、任何方向、在任何路面上行驶任意时间量。
(c)测试车辆接近前导车辆的后部。
(d)从车头间距达到L0开始,以最小且平稳的油门踏板输入将被测车辆速度保持在测试速度的±1.6 km/h以内。
(e)当车头间距达到L0时,以最小的转向输入维持测试车辆的航向,使得行驶路径与预期行驶路径横向偏离不超过±0.3m,并且测试车辆的横摆角速度不超过±1.0°/s。
7.3.3 前方碰撞警告开始后的试验行为
(a)油门踏板以任何速度释放,以便在500ms内完全释放。对于启用巡航控制测试的车辆,此操作被省略。
(b)对于使用人工制动进行的测试,按照第10章中的规定应用行车制动器。制动踏板应用的开始发生在前方碰撞警告开始后(1.0±0.1)s。
(c)对于没有使用人工制动的测试,在满足7.3.4的测试完成标准之前,不进行人工制动应用。
7.3.4 测试完成标准
当测试车辆完全停止而不与前导车辆接触或测试车辆与前导车辆接触时,测试结束。
7.4 移动较慢的前导车辆
7.4.1 测试参数
(a)对于没有使用测试车辆人工制动的测试,测试车辆的测试速度为40km/h至80km/h之间的任何速度,前导车辆速度为20km/h。
(b)对于使用测试车辆的人工制动的测试,试验车辆的试验速度是70km/h至100km/h之间的任何速度,前导车辆的速度是20km/h。
7.4.2 前方碰撞警告开始前的试验行为
(a)所述前导车辆向前行驶的方式使得所述前导车辆的纵向中心平面横向偏离预定行驶路径不超过±0.3m。
(b)测试车辆接近前导车辆。
(c)从车头间距达到L0开始,以最小且平稳的油门踏板输入将被测车辆和前导车辆的速度保持在测试速度的±1.6km/h以内。
(d)从车头间距达到L0开始,以最小的转向输入来维持被测车辆和前导车辆的车头,使得被测车辆的行驶路径横向偏离前导车辆的中心线不超过±0.3m,并且在前方碰撞警告开始之前,被测车辆的横摆角速度不超过±1.0°/s。
7.4.3 前方碰撞警告开始后的试验行为
(a)测试车辆的油门踏板以任何速率释放,以便在500ms内完全释放。对于启用巡航控制测试的车辆,此操作被省略。
(b)对于使用人工制动进行的测试,按照第10章中的规定应用行车制动器。制动踏板应用的开始时间为前碰撞警告开始后的(1.0±0.1)s。
(c)对于没有使用人工制动的测试,在满足7.4.4的测试完成标准之前,不进行人工制动应用。
7.4.4 测试完成标准
当测试车辆速度小于或等于前导车辆速度而不与前导车辆接触或当测试车辆与前导车辆接触时,测试结束。
7.5 减速前导车辆
7.5.1 测试参数
(a)测试车辆测试速度为50km/h或80km/h,前导车辆速度与测试车辆测试速度相同。
(b)[保留]
7.5.2 在前导车辆制动开始之前进行测试
(a)在前导车辆制动开始前的3秒之前,测试车辆在任何路面上以任何速度、任何方向行驶任何时间量。
(b)在前导车辆制动开始前3秒和前导车辆制动开始之间:
(1)导车辆向前行驶,使得车辆的纵向中心平面横向偏离预定行驶路径不超过±0.3m。
(2)测试车辆在12m和40m之间的任意距离处跟随前导车辆。
(3)在前方碰撞警告开始之前,测试车辆的速度保持在测试速度的±1.6km/h以内,油门踏板输入最小且平稳。
(4)前导车辆的速度保持在测试速度的±1.6km/h以内。
(5)测试车辆和前导车辆的车头保持最小的转向输入,使得它们的行驶路径从前导车辆的中心线横向偏离不超过±0.3 m,并且测试车辆的横摆角速度不超过±1.0°/s,直到前方碰撞警告开始。
7.5.3 前导车辆制动开始后的测试行为
(a)前导车辆以0.3g至0.5g之间任意值的目标平均减速度减速到停止。目标减速度在前导车辆制动开始后1.5s内实现,并保持到停止前250ms。
(b)在前方碰撞警告开始后,目标车辆的油门踏板会以任何速率释放,以便在500ms内完全释放。对于启用巡航控制的车辆,此操作将被省略。
(c)对于使用手动制动进行的测试,按照第10章中的规定应用行车制动。制动踏板应用开始发生在前方碰撞警告开始后1.0±0.1s。
(d)对于没有手动制动应用的测试,在满足7.5.4的测试完成标准之前,不进行手动制动应用。
7.5.4 测试完成标准
当测试车辆完全停止而不与前导车辆接触或测试车辆与前导车辆接触时,测试结束。
8. 车辆-行人测试
8.1 设置
8.1.1 常规
(a)作为参考,下表规定了可能进行的每个测试的测试车辆车速(VSV)、行人模型速度(VP)、行人模型的重叠率以及照明条件。
(b)测试车辆的预期行进路径是一条直线,该直线起始于与L0车头时距相对应的位置。
(c)如果路面标有单车道线或双车道线,则预期行驶路径与最近车道线平行,且距离车道线内沿1.8m;如果路面标有与行进路径接壤的两条车道线,则预期行驶路径在两条线之间居中。
(d)对于每次测试,都将从指定的范围中选择测试车速(VSV)。
接近行人时的测试参数
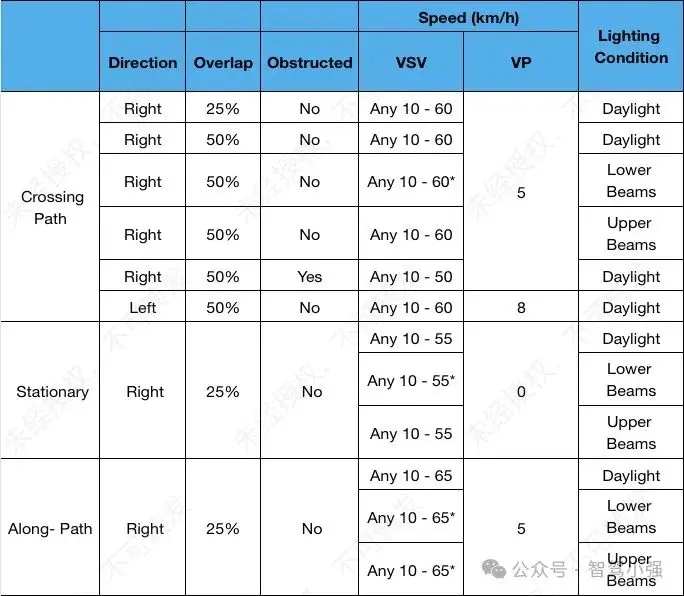
*低速性能测试要求适用于[最终规则发布后四年的第一个9月1日]之前。
8.1.2 重叠
如下图所示,重叠描述了在未发生制动时与行人接触的测试车辆前部点的位置。重叠是行人测试时人体模型穿过的测试车辆总宽度的百分比。它从右侧或左侧测量,具体取决于行人测试人体模型起源的测试车辆的一侧。对于每次测试运行,实际重叠将在指定重叠的±0.15m内。

8.1.3 行人测试模型
(a)对于动态测试测试,其中行人测试模型被固定在移动设备上,行人测试模型被固定以使其面向运动方向。行人测试模型的腿部关节在设备移动时开始摆动,并在设备停止时停止摆动。
(b)对于静态测试,其中行人测试人体模型是静止的,行人测试人体模型背对测试车辆,并且行人测试模型的腿保持静止。
8.2 车头间距计算
对于在8.3、8.4和8.5下进行的每个测试,计算测试车辆的前平面和行人测试模型上的平行接触平面之间的车头间距(L0),以m为单位,提供4.0s的碰撞时间(TTC)。L0由以下等式确定,其中VSV是测试车辆的速度(以m/s为单位),VP-y是行人测试模型在预期行驶路径方向上的速度(以m/s为单位)的分量:
8.3 行人横穿测试
8.3.1 测试参数和设置(从右侧开始无遮挡)

(a)测试区域按照图3设置。
(b)测试在白天或夜晚条件下进行,但与行人在25%重叠处的测试仅在白天条件下进行。
(c)使用成人模型进行测试。
(d)行人测试模型的移动垂直于测试车辆的预期行进路径。
(e)行人测试模型设置在测试车辆预定行进路径右侧4.0±0.1m处。
(f)预期的重叠(碰撞点)是右侧的25%或50%。
(g)测试车辆的速度为10km/h至60km/h之间的任何速度。
(h)行人测试模型速度为5km/h。
8.3.2 测试参数和设置(从左开始无遮挡)

(a)测试区域按照图4设置。
(b)测试在白天条件下进行。
(c)使用成人模型进行测试。
(d)行人测试模型的移动垂直于测试车辆预期的行进路径。
(e)行人测试模型设置在测试车辆预定行进路径左侧6.0±0.1m处。
(f)预期的重叠(碰撞点)为50%。
(g)测试车辆的速度为10km/h至60km/h之间的任何速度。
8.3.3 测试参数和设置(有遮挡)。

(a)测试区域按照图5设置。
(b)测试在白天条件下进行。
(c)使用儿童模型进行测试。
(d)行人测试模型的移动垂直于测试车辆的预期行进路径。
(e)行人测试模型设置在测试车辆预定行进路径右侧4.0±0.1m处。
(f)预期的重叠(碰撞点)为50%。
(g)两个车辆测试装置固定在与预定行进路径平行的静止位置,两个车辆测试装置与预定行进路径面向同一方向,一个车辆测试装置与另一个车辆测试装置正后方相隔1.0±0.1 m,当被测车辆处于预定行进路径时,每个车辆测试装置的最左侧与测试车辆的最右侧间隔1.0±0.1 m。
(h)测试车辆的速度为10km/h至50km/h之间的任何速度。
(i)行人测试模型速度为5km/h。
8.3.4 前方碰撞警告或车辆制动开始前的测试行为
(a)测试车辆接近行人测试模型的交叉路径。
(b)从车头距离对应于L0开始,以最小且平稳的油门踏板输入将被测车辆速度保持在测试速度的1.6 km/h以内。
(c)当车头距离对应于L0时,以最小的转向输入维持测试车辆的航向,使得测试车辆的行驶路径横向偏离预期行驶路径不超过0.3m,并且在任何自动制动开始之前,测试车辆的横摆角速度不超过±1.0°/s。
(d)根据8.1.2中的标准,在行人测试模型满足预期重叠的时间触发行人测试模型设备,行人测试模型在设备开始移动后的1.5m内达到其预期速度,并将其速度保持在预定速度的0.4km/h内,直到满足8.3.6的测试完成标准。
8.3.5 前方碰撞警告或车辆制动开始后的测试行为
(a)在前方碰撞警告或车辆制动开始后,测试车辆的油门踏板会以任何速率释放,以便在500ms内完全释放。对于启用巡航控制的车辆,此操作将被省略。
(b)在满足8.3.6的测试完成标准之前,不进行手动制动。
(c)行人模型继续移动,直到满足8.3.6的完成标准。
8.3.6 测试完成标准
当被测车辆完全停止而没有与行人测试模型接触、当行人测试模型不再在被测车辆的路径上或当被测车辆与行人测试模型接触时,测试结束。







最新资讯
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
试验载荷谱采集
2025-04-29 11:07
-
APx500 软件演示模式 (Demo Mode) 竟有这些
2025-04-29 08:37
