




 广告
广告





















































让摄像头变聪明的法宝:博世全新计算机视觉加速IP v2.0

ADAS和自动驾驶技术一直是车界最热议的话题之一,其中图像传感器和图像处理是实现自动驾驶的关键因素,也是各大车企竞争的核心领域。根据S&P Global的分析显示,当前许多车企正在多个地区广泛部署L2+及L3级别的自动驾驶技术;预计到2035年,装备这些系统的车辆将至少占到全球新车总销量的31%。(注1)
在ADAS或自动驾驶系统中,例如自动紧急制动(AEB)、车道保持辅助(LKA)和车道巡航控制(LCC)等功能,均依赖车辆的前视摄像头实时且精确地捕捉前方道路、车辆以及周边环境的信息,这给图像传感器的感知和处理算法能力带来了极大的挑战。
那么如何让摄像头从“看见”到“看懂”,变得更聪明灵敏呢?博世汽车电子推出的全新计算机视觉(Computer Vision,以下简称CV)加速器IP,能帮助具备图像处理能力的SoC(片上系统)芯片开发者高效实现常用的CV算法,如密集光流、立体视差、目标分类等。
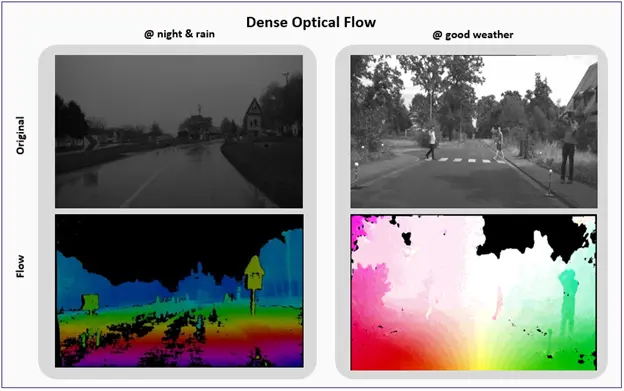
博世光流算法实现效果
博世的CV半导体IP产品家族包含一组多个硬件加速器IP模块,能支持最高12M像素的输入。用户可以根据自身的应用场景挑选和组合适合的模块,以增强ADAS和自动驾驶系统的性能。所有这些IP模块均可支持ASIL-D功能安全等级的应用,协助SoC开发者灵活构建高功能且高安全性的芯片架构。
得益于博世在前视摄像头技术方面的深厚积累,自2019年起,博世汽车电子已向汽车SoC供应商交付了第一代v1.0产品。基于这些经验积累,此次推出全新的第二代v2.0产品家族在提高图像分辨率的同时,还深度优化了功耗和数据吞吐率。
新产品家族包括:
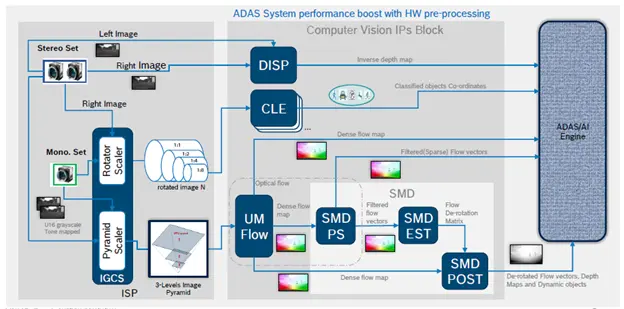
• U/M Flow IP: 密集光流IP
先进的光流估计算法,可生成密集且准确的前向和后向光流矢量场。
• SMD IPs:Structure from motion detection
运动恢复结构检测,包括,
- SMD-PS IP: Priority Sampling
基于优先级采样,选择最佳的光流矢量,去除由3D场景重建检测到的运动目标。
- SMD-EST IP:Ego-Motion Estimation
自运动估计(Ego-Motion Estimation)用于估算相机的平移和旋转。
- MD-POST IP:Post Processing
3D场景重建(3D Scene Reconstruction),移除光流中的自我旋转,并计算深度和高程图。
• DISP IP: Stereo disparity Engine
立体视差引擎,在一组debayer格式、无畸变且对极线矫正的灰度输入图像之间进行高质量的立体视差计算。
• CLE IP:Classifier Engine
分类器引擎,基于ACF目标检测分类器,支持在图像中的不同分辨率和多个感兴趣区域(ROIs)对多个类进行分类。
博世预计将在2025年第一季度交付全新IP产品家族。目前,博世汽车电子已与多家国内外意向客户就技术应用、性能提升和市场需求等方面进行了深入讨论,并取得了初步的共识,为未来的合作奠定了坚实的基础。
这一产品家族的推出预计将引导市场新趋势,并在提高ADAS及自动驾驶系统的性能和安全性方面发挥重要作用,从而加速自动驾驶技术的推广和应用。
注1:S&P Global Mobility, Autonomous Vehicle Reality Check: Widespread Adoption Remains at Least a Decade Away



编辑推荐




最新资讯
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
试验载荷谱采集
2025-04-29 11:07
-
APx500 软件演示模式 (Demo Mode) 竟有这些
2025-04-29 08:37
