




 广告
广告





















































Open House CN 2024回顾-S3:CarMaker在数据驱动开发流程中的应用

由于自动驾驶开发全栈技术和传统嵌入式系统开发技术有许多不同之处,因此应对自动驾驶的测试技术也有很多进化,IPG Automotive为此提出了全新的测试技术架构。纵观这些差异中最突出的当属数据的重要性,无论是基于场景的测试,还是基于机器学习的训练,都需要大量的数据。为了能更加方便管理海量数据,VIRTO应运而生,去年IPG Automotive推出了全新的仿真数据管理和数据仓库VIRTO。今年的Open House进一步展示了VIRTO在整个开发流程中的重要性,以及对未来的测试形态的展望。
1. 自动驾驶全栈仿真测试架构
在仿真数据管理&数据仓库的下一层是两个自动驾驶开发全栈常用的技术或方法,分别是DevOps和MLOps。DevOps 是一种软件开发方法,它强调开发 (Dev) 和运维 (Ops) 团队之间的协作和自动化,以实现更快、更频繁的软件交付。MLOps 是 DevOps 的扩展,专门针对机器学习 (ML) 模型的开发和部署。它将 DevOps 的原则和实践应用于机器学习生命周期,从数据准备到模型训练、部署和监控。简而言之,DevOps 侧重于软件开发的整个生命周期,而 MLOps 专注于机器学习模型的整个生命周期。
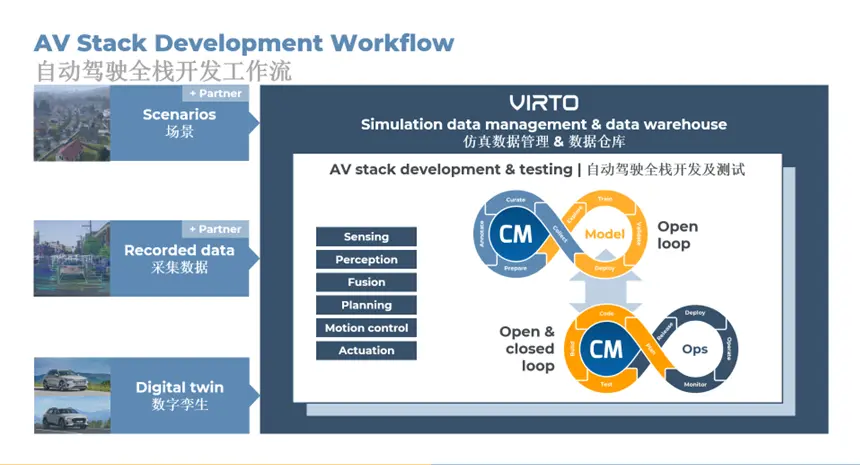
自动驾驶全栈仿真测试架构
2. CarMaker的场景搭建和泛化
VIRTO不仅集成了这两个方法,还为其打通了数据源,数据源分别来自仿真场景合成数据、采集数据和数字孪生数据。其中,仿真场景合成数据是基于CarMaker提供的,它的上游得益于CarMaker中丰富的环境和场景模型,同时还依赖于CarMaker的场景创建和泛化能力,可以通过PythonAPI自由控制场景中的每一个元素,比如道路周围的元素和环境要素(如光照、雾等),以及动态交通元素,这样就可以快速生成海量场景。
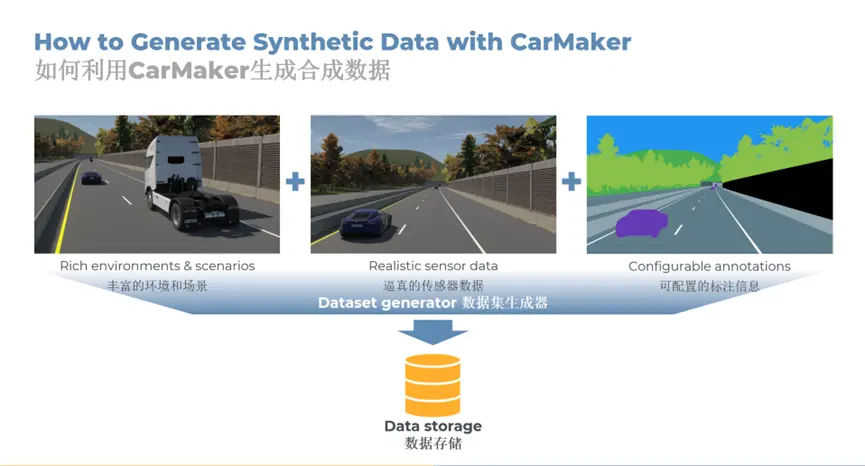
CarMaker生成合成数据
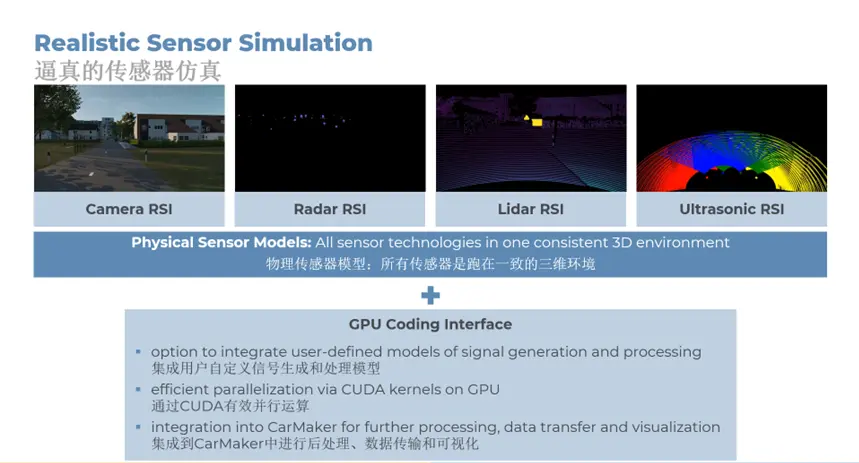
3. CarMaker的物理传感器模型
除此之外,逼真的传感器数据是保证合成数据质量的重要因素。CarMaker目前已经推出的摄像头、毫米波、激光和超声波物理模型可以保证各传感器所输出的原始信号均来自一致的三维环境,保证同步性。同时,物理传感器的底层是基于Nvidia的显卡技术,CarMaker通过开放GPU Coding interface以满足用户自定义信号输出和嵌入自定义模型的可能性。
4. CarMaker的新标注工具
可配置的标注信息是合成数据的另一个关键要素,需要指出的是可配置的标注信息对模型训练而言至关重要。IPG Automotive基于最新的高质量渲染软件MovieNX开发了全新的可配置标注工具,此工具可以让用户细致地标注每一个三维物体的每一个面,比老版本的标注工具有大大的质量提升。
5. 数据生成
标注后的数据可通过数据集生成器可以传输或转存成不同的数据集格式,同时传感器原始数据也可以通过RSDS(原始信号数据流接口)传输给待测件。
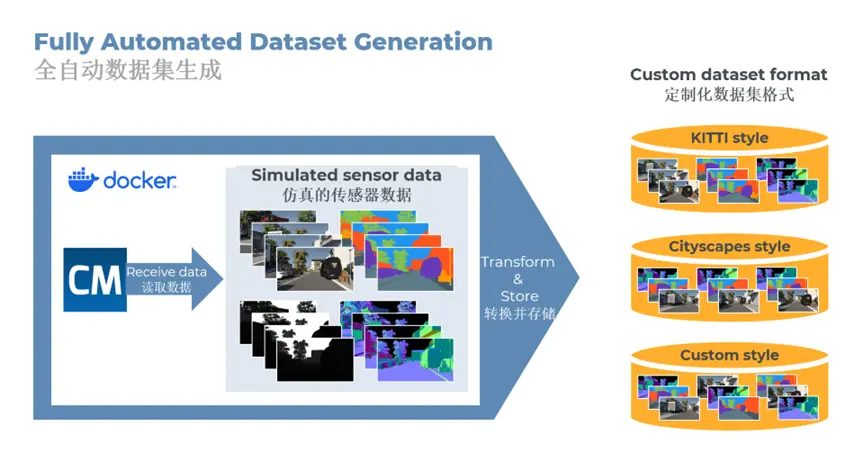
合成数据自动生成和导出
最后,仿真合成数据允许工程师在虚拟环境中模拟各种驾驶条件和场景,从而测试汽车在极端或罕见情况下的表现。这种模拟测试不仅节省了时间和成本,而且可以覆盖更广泛的测试案例,包括那些在现实世界中难以复现的情况。通过仿真合成数据,可以对汽车的传感器、控制系统和通信系统进行严格的测试。这有助于在开发前期就能够发现潜在的设计缺陷和性能问题,从而减少开发后期的压力。再者,仿真合成数据的可重复性和可控性为汽车功能测试提供了一致性和可靠性。这使得测试结果更加精确,有助于评估和比较不同设计方案的效果。



编辑推荐




最新资讯
-
UL 9540A-2025新版解析:储能安全标准全面
2025-04-01 21:04
-
中国汽研与远程新能源商用车集团共建安全创
2025-04-01 21:02
-
中汽研科技CAN芯片互操作性测试能力
2025-04-01 20:57
-
中汽中心与比亚迪集团签署战略合作协议
2025-04-01 20:56
-
欧盟:通用数据保护法GDPR的认证
2025-04-01 20:53
