




 广告
广告





















































基于转速波动控制的车内与电机 NVH 分析优化

摘要:电机控制策略的调整对电动车 NVH 性能存在不同程度的影响,本文主要通过对电机转速波动产生的因素进行分析,同时对电机转速波动控制策略层面进行优化袁,从而达到优化电驱系统与车内 NVH 的目的,为解决相似问题提供了一定的借鉴意义.
关键词:转速波动;振动噪声;电控制策略
0 引言
电动汽车行业的迅猛发展,为消费者提供了更加多样的选择,作为最直观的驾驶体验,电动汽 车 的 NVH (即 Noise 噪 声 、Vibration 振动和 Harshness 声振粗糙度,通俗来讲即为不平顺性)仍然是许多消费者购买的评价指标之一,而作为电车驱动的核心之永磁同步电机(PMSM)因具有高转矩、高惯性比、结构可靠、控制性能优良及运转效率高效等优点,从而广泛应用于电动车领域等许多工业领域,同时永磁同步电机由于转速 \ 转矩的不正常脉动是产生电磁噪声与振动的主要原因,较为高频的电磁噪声,在行驶过程中易使人产生不适感,同时电机的转速 \ 转距的脉动,还会使电机内部损耗加剧,从而缩短电机的使用寿命。
本文主要以某纯电动汽车为例,通过对加速工况过程中车内驾驶员内耳存在的高频噪声与电机本体振动过大问题进行排查,确定电机转速波动为引发电机本体振动过大与车内驾驶员高频噪声的主要因素。
1 问题描述
某样车采用后置后驱电驱方式,主要采用永磁同步无刷电机,在加速过程中存在的以下两个问题点。
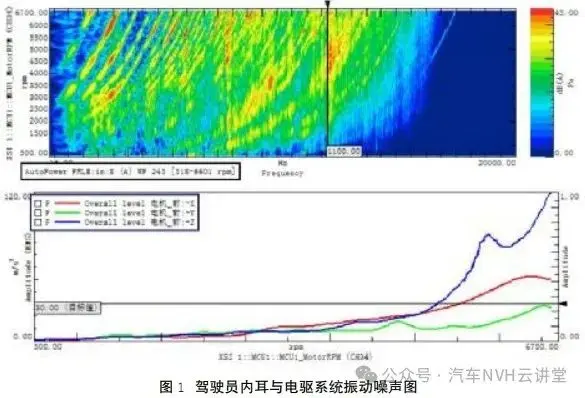
①驾驶员内耳存在 1100Hz 以上宽频噪声,3000rpm以上最为明显;主观感受较差。
②电机本体振动过大,主要表现为 5000 转以上高转速段。
通过测试测的驾驶员内耳加速噪声如下 colormap 图1 所示,同时电机本体振动测点如图 1 所示。
1.1 问题诊断
为进一步对两个主要问题点进行识别分析,对样车电驱系统本体振动噪声进行测试分析,同时采用 CAN 线,进行转速与转矩信号的提取。
在整车半消声室环境下,进行对整车状态下的振动噪声布点,如图 2 所示。

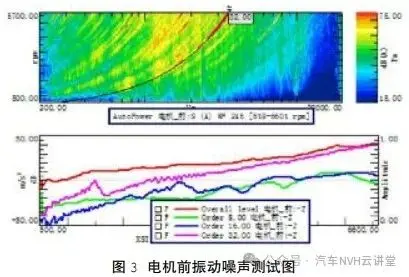
通过对图 3 分析可以看出电机振动总级整体偏大的原因主要为 32 阶次的贡献,而对于极对数为 4 对的驱动电机,32 阶问题的根源为电机本体内部的影响。
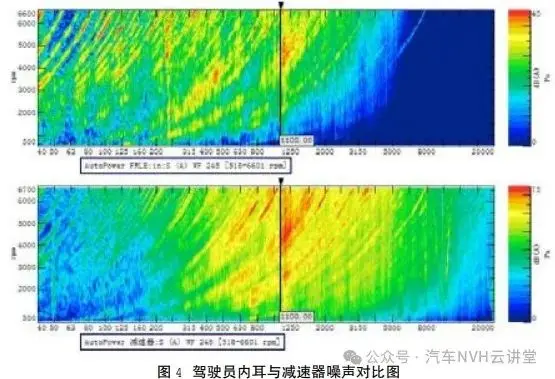
通过对比减速器本体噪声可以看出,减速器存在的明显 1100Hz 宽频噪声是引起驾驶员内耳噪声问题的主要原因。
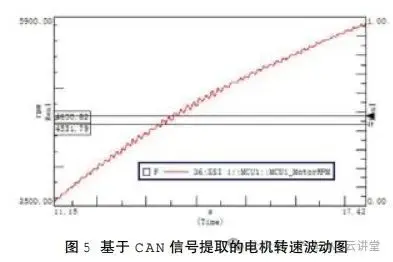
同时对整车状态下的电机转速输出信息进行提取,具体提取信息如图 5 所示,由图可知,整车加速过程中,电机转速信号在 3500rpm 以上存在较为明显的线性波动,波动幅值达到依100rpm,超出一般电机转速波动水平,同时结合测的振动噪声结果,推测为电驱系统壳体模态共振与转速波动过大是引起电驱系统本体振动过大与车内驾驶员内耳宽频噪声的主要原因。
1.2 壳体模态问题确认
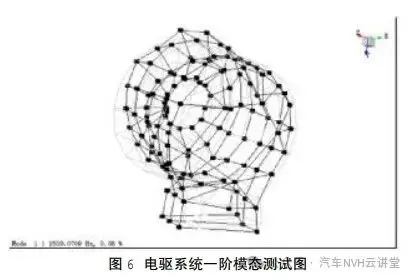
针对壳体模态可能引起的共振问题,以整车方向为基准,建立电驱系统的模态阵型,测的结果如图 6 所示;可以看出电驱系统的一阶模态为 1509Hz,高于问题频率所处区间,排除壳体模态对其本身的影响,因此可以推测转速波动为主要影响因素。
2 PMSM 转速波动的影响因素及优化
2.1 PMSM 中转速波动的影响因素
①磁链谐波的因素,理想状态下的 PMSM 物理模型,永磁体磁场在空间中为正弦分布,但在实际生产中,由于电机内部定子开槽、磁路不对称等制作工艺限制的影响,永磁磁场难以以较为理想的正弦分布。
②死区效应的因素。在 PMSM 驱动体系中,为了防止在同一向桥臂的两只开关管发生直通短路现象,会在其开通与断开的空档时候增加一段的死区时候,因此而引发的死区效应会使逆变器输出电流波形畸变,造成输出电流的基波份量减少,从而引起转速的波动现象。
③检查误差方面。在电流传感器的检测过程中,由于直流偏置、原件零飘或变压器的测量存在的正交等误差,在很大程度上会影响电流转矩的计算精度,使电机产生检测转矩 \ 转速脉动。
2.2 PMSM 转速波动的优化控制
因此为改善因转速波动导致的加速过程中的 电驱系统与车 内驾 驶 员NVH 问题,对电机控制系统进行了优化,主要优化策略为:淤增加抗转速抖动功能,扭矩主动抑制消除转速波动;于修改底层电流设定值查表函数,优化输出电流的平滑性;盂增加应用层转速滤波处理。
方案 1 中,对电机控制策略进行了优化,利用滤波对各个主要频次转速波动分量进行估算,同时将转速波动分量与 PI 控制器并联,嵌入值转速控制环中,根据系统对周期性扰动转速的衰减程度,进行比例增益补偿[7],从而起到抑制周期性转矩扰动的效果;
方案 2 中,通过修改电流底层的设定查表函数,消除锯齿状的波形,使输出的电流波形更为光滑;
方案 3 中,通过对应用层软件条用转速值时多增加平均滤波算法,从而使转速波动更为平滑。
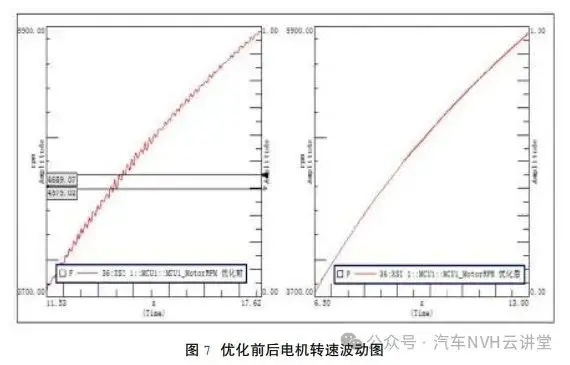
通过以上优化,对基于 CAN 总线协议中的电机转速进行分析,对比结果如图 7 所示,可以看出,电机转速波动由依100rpm 至基本消失,波动现象基本消除。
电机转速波动优化后,对整车状态下的电驱系统关注点位置(电机前振动、减速器噪声)与车内驾驶员内耳进行测试分析,优化前后如图 8 所示。
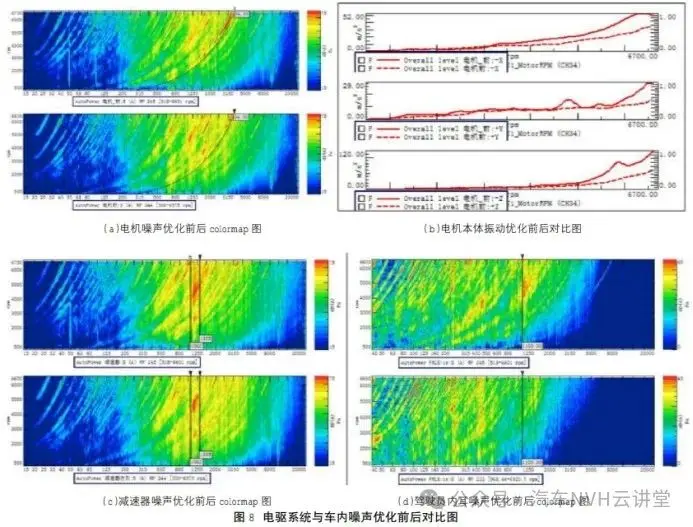
由同步测的电机噪声可以看出,colormap 图 a 中 32阶次明显消除后,电机本体振动总级(图 b)在 5000rpm 以上整体明显降低,基本处于目标线以内,减速器在 1100Hz存在的宽频噪声同样存在较为明显的改善(如图 c),对应车内驾驶员内耳噪声(如图 d),问题宽频则完全消除。
同时结合电机转速波动优化前后对比可以看出,在加速工况下,在转速达到 3000rpm 以上后存在的异常波动是引起电驱系统与车内 NVH 较差的主要因素。
3 小结
电驱系统中的电机转速波动与转矩波动均会给电机本体与车内带来明显的 NVH 问题,本文章主要从控制策略上,通过扭矩主动抑制消除转速波动、修改底层电流设定值查表函数,优化输出电流的平滑性以及增加应用层转速滤波处理等综合措施,从而实现对电驱系统与车内NVH 的优化,一种优化,同时解决两个问题点,为电动汽车整车开发过程中同类问题提供了一种思路和方向。
作者:李奥飞 孙健颖 张宁 杭亚朋
作者单位:(中汽研(天津)汽车工程研究院有限公司,天津 300300)
来源:内燃机与配件



编辑推荐




最新资讯
-
R171.01对DCAS的要求⑤
2025-04-20 10:58
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
