




 广告
广告





















































雨刮-风窗摩擦噪声声品质主动控制自适应均衡算法

NVH团队在国内EI学术期刊《振动与冲击》(Journal of Vibration and Shock)发表文章《雨刮-风窗摩擦噪声声品质主动控制自适应均衡算法》。文章通过提出一种基于集合经验模态分解的权重约束自适应噪声均衡算法实现雨刮-风窗摩擦噪声声品质主动控制,对比分析响度、粗糙度以及尖锐度声品质心理声学参数,并依据仿真试验验证其有效性。
文章链接:http://jvs.sjtu.edu.cn/CN/Y2024/V43/I8/263
1 内容摘要
雨刮-风窗摩擦噪声是影响车内声品质的重要因素之一,对其声品质主动控制有利于改善车内声学环境。为了实现对雨刮-风窗摩擦噪声声品质主动控制,提出一种基于集合经验模态分解的权重约束自适应噪声均衡(EWCANE)算法。首先通过EEMD方法分解雨刮-风窗摩擦噪声得到非平稳度较低的固有模式函数分量,计算各分量的方差比以表征各分量对噪声的影响程度;然后基于输入信号和误差信号的欧式范数以自适应对滤波器权重进行约束来降低噪声的瞬态冲击;最后根据方差比调整声音增益因子以均衡各分量的声品质主动控制。经过仿真验证,实车雨刮-风窗摩擦噪声信号响度得到有效降低,改善了雨刮-风窗摩擦噪声的声品质。
2 算法原理
基于主动控制和模态分解理论方法,本文提出一种雨刮-风窗摩擦噪声声品质主动控制方法。首先,通过EEMD分解方法来获得非平稳度较低的IMF分量并计算各个IMF分量与原有噪声信号的方差比,从而表征不同分量对原有噪声信号的影响程度。然后,通过计算输入信号和误差信号的欧式范数对权重进行约束,降低其瞬态冲击特性。最后,通过方差比的计算结果来调整相应的声音增益因子β,实现对雨刮-风窗摩擦噪声声品质主动控制。其算法框图如图1所示。

图1 EWCANE算法框图
3 仿真分析
3.1 噪声采集实验
本文通过对某品牌新能源汽车进行雨刮-风窗摩擦噪声采集实验,采集时车门窗都处于关闭状态,采集地点位于半消声室内,采集设备为西门子公司的Test.Lab数据采集分析系统。依照GB/T 18697—2002《声学 汽车车内噪声测量方法》的要求对低速湿润和高速湿润工况下的雨刮-风窗摩擦噪声进行采集。图2中展示了噪声测点选取和测试设备。

图2 噪声测试现场
3.2 噪声分解与方差比计算
由于采集到的主驾驶位和副驾驶位双耳处的噪声信号趋于一致性,选取主驾驶位右耳侧测点3所采集到的噪声信号来进行表征。本文对主驾驶位右耳侧测点3所采集到的低速湿润和高速湿润两种工况进行研究,对所采集的信号选取5秒数据进行对比分析,通过EEMD方法进行分解来降低雨刮-风窗摩擦噪声的非平稳性。两种工况分解所得到的IMF分量时域结果和频域结果如图2所示,其中图3(a)和(b)分别为低速湿润工况下各IMF分量所对应的时域分解结果和频域分解结果,图3(c)和(d)分别为高速湿润工况下各IMF分量所对应的时域分解结果和频域分解结果。
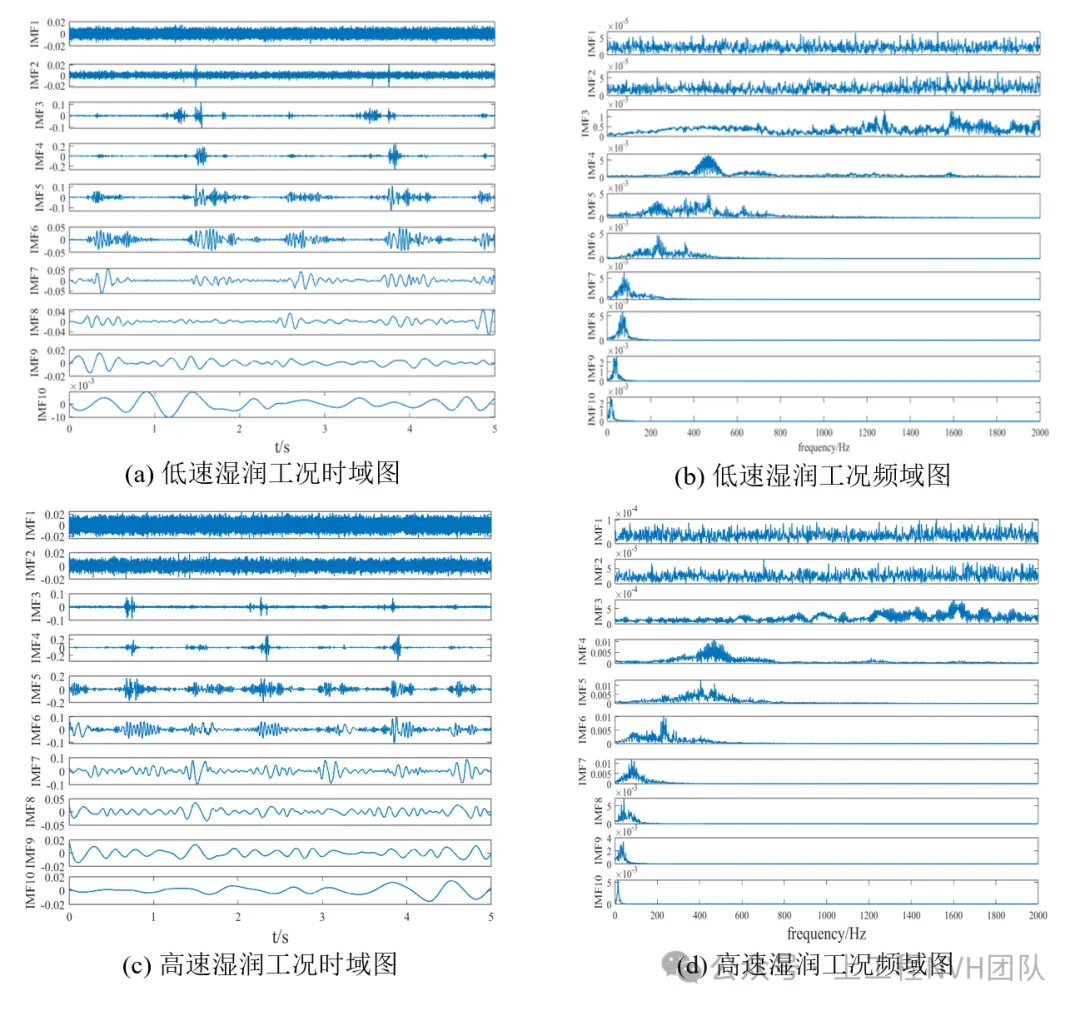
图3 不同工况下IMF分量结果
将两种工况下得到的IMF分量进行方差计算,与原有噪声信号序列进行方差比值,求得方差比来表征不同IMF分量对原有噪声信号序列的影响程度。两种工况的方差比计算结果如图4(a)和图4(b)所示。
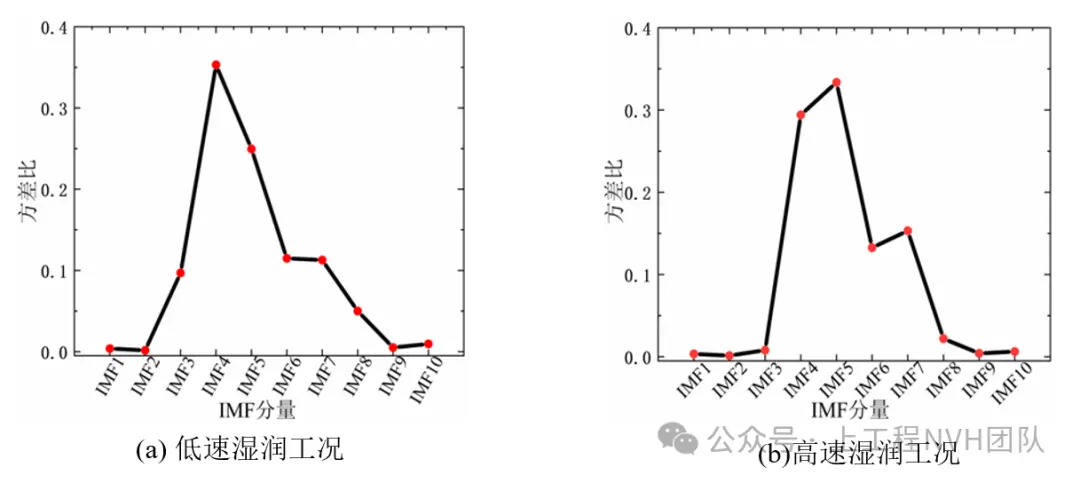
图4 不同工况下IMF分量方差比结果
3.3 噪声时域和频域控制结果
为了进一步验证其主动控制效果,将ANE算法与所提出的EWCANE算法分别对雨刮-风窗摩擦噪声进行主动控制。图5为两种算法在两种工况下声品质主动控制后的时域对比结果,从图中可以看出,两种算法对雨刮-风窗摩擦噪声均可得到有效的控制,并且在显著降低振幅的同时对原始波形都有一定的保留。但所提出的EWCANE算法采用EEMD方法来对雨刮-风窗摩擦噪声的不同成分进行分解,通过引入输入信号和误差信号的欧式范数自适应进行权重更新,并且对反转时刻产生的瞬态冲击噪声进行权重约束,保证了算法不会由于信号的突变而引起权重发散的问题。因此,所提出的EWCANE算法在稳态误差上明显优于传统的ANE算法,对雨刮-风窗摩擦噪声具有更好地主动控制效果。图6为两种算法在两种工况下声品质主动控制后的频域对比结果,从图中可以得出结论,在0~2000Hz频率范围内,所提出的EWCANE算法明显优于传统的ANE算法,并对于主要集中在0~500Hz的频率范围内取得了明显的控制效果。
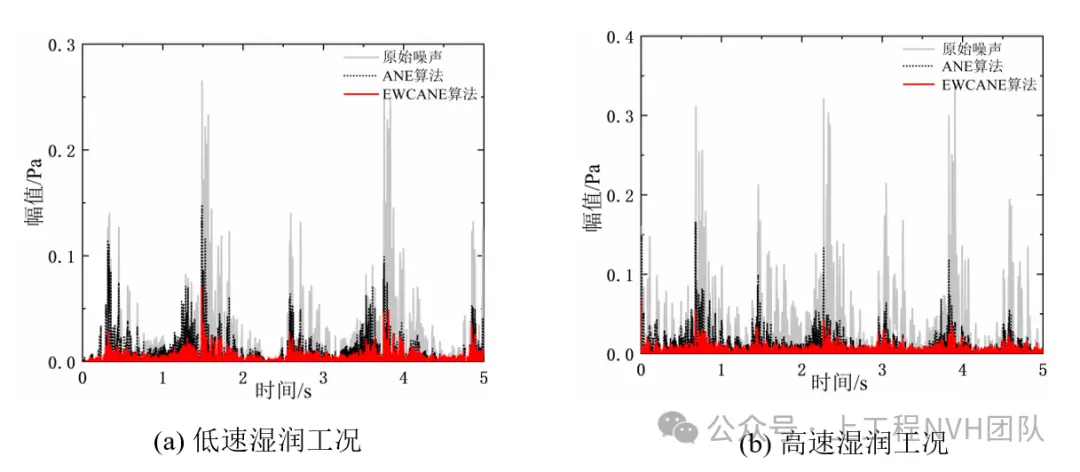
图5 不同工况时域结果图

图6 不同工况频域结果图
3.4 声品质参数控制结果
心理声学参数可以更好地描述人们对噪声的主观感知。因此,为了进一步体现所提出的算法对雨刮-风窗摩擦噪声声品质的主动控制效果,将传统的ANE算法和所提出的EWCANE算法主动控制后的残余误差信号进行声品质客观参数计算。本文通过使用西门子公司的Test.Lab系统进行计算雨刮-风窗摩擦噪声声品质客观参数指标,包括响度、粗糙度以及尖锐度。图7为低速湿润工况下的响度、粗糙度以及尖锐度的控制效果,图8为高速湿润工况下的响度、粗糙度以及尖锐度的控制效果。
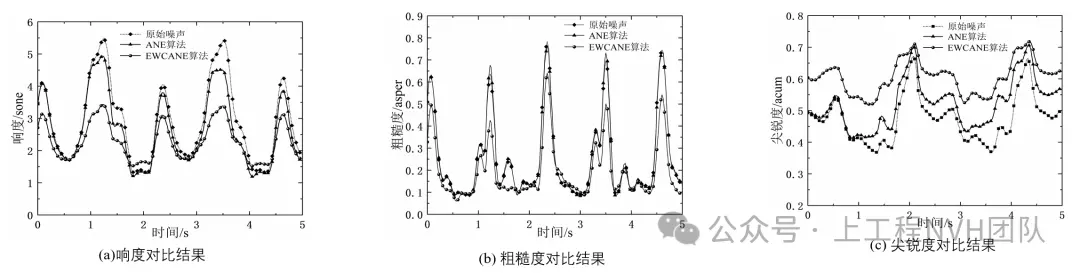
图7 低速湿润工况声品质参数控制结果
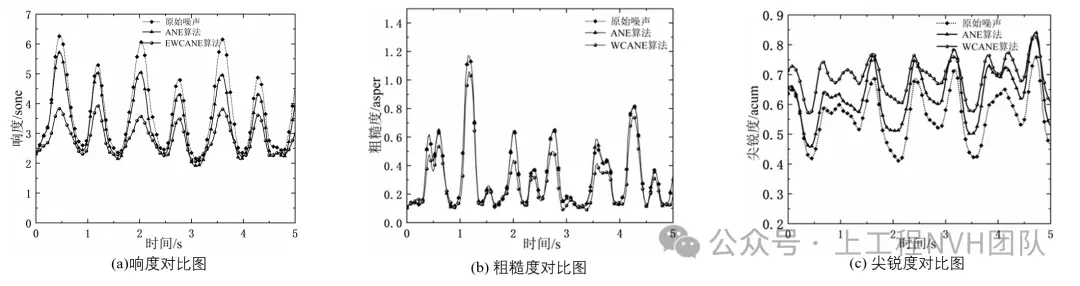
图8 高速湿润工况声品质参数控制结果
4 结论
综上所述,两种算法对响度都能有效控制,与传统的ANE算法相比,所提出的EWCANE算法的控制效果更好。在粗糙度控制方面,ANE算法对粗糙度的控制效果不佳,EWCANE算法可以对粗糙度进行有效控制。但由于主动控制过程后高频部分所占比例有所上升,使得两种算法在尖锐度方面控制效果不佳。因此,所提出的EWCANE算法可以有效控制雨刮-风窗摩擦的噪声响度和粗糙度,是一种可以主动控制雨刮-风窗摩擦噪声声品质的有效方法,对改善车辆内部声品质具有一定的参考价值。
5 致谢
本文得到国家自然科学基金项目(No.52172371)、上海市优秀学术带头人项目(No. 21XD1401100)、上海市新能源汽车振动噪声评价与控制专业技术服务平台基金资助项目(No. 18DZ2295900)资助。







最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
