




 广告
广告





















































UN/ECE R79,辅助转向领域的“大百科”(中)

04 ACSF
自动控制转向功能(Automatically Commanded Steering Function,ACSF)通过对车辆状态和道路状态的评估,并在满足条件后提供转向辅助功能,包括A型ACSF、B1型ACSF、B2型ACSF、C型ACSF、D型ACSF、E型ACSF,其中B2型ACSF、D型ACSF和E型ACSF标准尚未定义,后续随着技术发展而逐渐完善。
一、A型ACSF
A型ACSF对应的常见功能为自动泊车辅助(Auto Parking Assist,APA)和遥控泊车(Remote Controlled Parking , RCP),是能够在车速不大于10km/h(+2km/h)的低速或泊车场景下对驾驶员进行转向辅助。
A型ACSF在整车上电的时候默认关闭,驾驶员可通过操作车辆配置的打开装置(硬开关、软开关等),打开功能,且在设计运行条件(感知系统、执行机构等)满足后,自动激活。A型ACSF打开/激活后,驾驶员还可以通过车辆配置的关闭装置(可复用打开装置)随时关闭功能。
如果A型ACSF还支持对车辆进行纵向控制(加速/制动),则车辆还需要配置有一种可检测运行区域里障碍物并通过刹停车辆来避免碰撞的装置。
A型ACSF激活后,需要对驾驶员进行提醒,关闭时也需要通过短暂但特有的警告信号对驾驶员进行提醒,警告信号可以是光学和声音或触觉(泊车过程的转向控制除外)的组合信号。对于RCP,A型ACSF的激活和关闭,应至少在远程控制设备上通过光学信号对驾驶员进行提醒。
RCP的额外需求:
(1)RCP应由驾驶员激活,而由系统进行后续控制。远程控制设备不能直接控制车辆的转向角、加速值和减速值等参数。
(2)泊车过程中,需要驾驶员持续操作远程控制设备。
(3)如果泊车过程中驾驶员连续操作终端或者车辆和远程控制设备之间的距离超过最大遥控范围或者车端和远程控制设备之间信号中端,车辆应该立即停车。
(4)如果车辆车门或后备箱打开,车辆应立即停车。
(5)如果车辆达到最终停车位置(驾驶员确认或系统自动确认),而且车辆启动按钮位于OFF挡,应立即激活EPB。
(6)泊车过程,当车辆变成静止后,RCP应确保车辆在坡路也不会溜车。
(7)RCP的遥控范围不能超过6m,这条确保了RCP必须在人的严密监视下进行。
二、B1型ACSF
性能要求
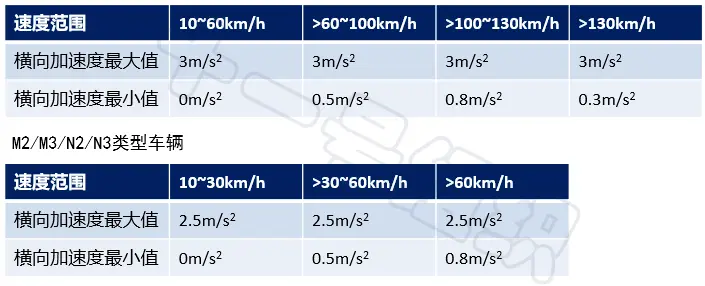
B1型ACSF对应的常见功能为车道保持辅助(Lane Keeping Assist,简称 LKA),它能在不超过横向加速度限值aysmax条件下,控制车辆保持在车道内行驶。当主机厂定义的横向加速度限值aysmax不超过表1中的最大值时,那么此过程横向加速度实际值允许超过主机厂定义横向加速度限值0.3m/s2(aysmax+0.3m/s2)。
表1 不同类型车辆加速度限值
车辆需要配置可以供驾驶员打开和关闭B1型ACSF的装置(硬开关、软开关等)。关闭的时候可以使用单一操作,比如驾驶员按一次开关,而关闭后再打开,则需要使用一系列操作,比如驾驶员连续两次按开关或长时间按开关等。
B1型ACSF在设计的时候,应能抑制转向控制的过度干预,以确保驾驶员的转向可操作性,同时避免车辆在操作过程中出现意外行为,为了实现这个目标,B1型ACSF需要满足以下两条需求:
(1)B1型ACSF激活后,驾驶员超控需要的转向力不超过50N。
(2)B1型ACSF激活后,车道保持过程产生的最大横向加速度不得超过表1中定义的值。
B1型ACSF HMI需求:
(1)功能打开及激活后,需要通过光学信号对驾驶员进行提醒。
(2)系统即将或已经超出设计运行范围(比如横向加速度超过最大限值),但此时驾驶员未对转向进行控制且车辆前轮即将越过车道线,此时系统应继续提供转向辅助并尝试将车辆控制在车道内,同时通过光学和声音或触觉组合警告信号来对驾驶员进行提醒。对于M2、M3、N2和N3类型车辆,如果配置有UN R130定义的车道偏离报警系统(Lane Departure Warning System,LDWS),那么此条的报警需求可由LDWS实现。
(3)系统发生失效后,需要通过光学警告信号对驾驶员进行提醒。如果此时驾驶员手动关闭功能,失效警告信号应被挂起(不显示警告信号)。
(4)功能激活后,需要能够对驾驶员是否手握方向盘进行检测。如果检测到驾驶员15s内未手握方向盘,应通过光学警告信号对驾驶员进行提醒。光学警告信号应向驾驶员传达“请手握方向盘”的信息,它应包含手和方向盘的图标信息,一种示例如图4所示。如果检测到驾驶员30s内未手握方向盘,图4示例中手或方向盘应变红,同时提供一种声音警告信号。上述警告信号应一直持续直到驾驶员手握方向盘或系统退出(非Active状态)。在声音警告信号持续30s后,功能应自动退出,退出时应通过不同于上文的声音警告信号对驾驶员进行提醒,且至少持续5s或者驾驶员手握方向盘。

图4 手握方向盘图标示例
测试要求
车道保持测试步骤及通过要求:
(1)被测车辆速度保持在Vsmin和Vsmax之间;
(2)对表1中定义的每个速度区间都取一个速度值进行测试,或者在aysmax相同的情况下,以相同的速度间隔取测试速度进行测试;
(3)驾驶员不对方向盘施加任何转向力(可以将手从方向盘拿开),匀速驶入两侧均有车道线的弯道;
(4)弯道中行驶所产生的横向加速度应设计为主机厂定义最大横向加速度aysmax的80%~90%之间。——如果被测车辆不穿过车道线且0.5s内横向加速度变化率不超过5m/s3,那么测试通过。
最大横向加速度测试步骤及通过条件:
(1)被测车辆速度保持在Vsmin和Vsmax之间;
(2)对表1中定义的每个速度区间都取一个速度值进行测试,或者在aysmax相同的情况下,以相同的速度间隔取测试速度进行测试;
(3)驾驶员不对方向盘施加任何转向力(可以将手从方向盘拿开),匀速驶入两侧均有车道线的弯道;
(4)弯道中行驶所产生的横向加速度应设计为比主机厂定义最大横向加速度aysmax的多0.3m/s2(aysmax+0.3m/s2)。——如果被测车辆通过弯道的横向加速度满足表1要求且0.5s内横向加速度变化率不超过5m/s3,那么测试通过。
超控测试步骤及通过要求:
(1)被测车辆速度保持在Vsmin和Vsmax之间;
(2)驾驶员不对方向盘施加任何转向力(可以将手从方向盘拿开),匀速驶入两侧均有车道线的弯道;
(3)弯道中行驶所产生的横向加速度应设计为主机厂定义最大横向加速度aysmax的80%~90%之间。
(4)驾驶员施加转向力控制被测测量驶离车道。——如果驾驶员超控所需的转向力小于50N,那么测试通过。
脱手测试步骤及通过要求
(1)被测车辆速度保持在Vsmin+10km/h和Vsmax+20km/h之间;
(2)车道长度要能保证B1型ACSF激活超过65s,驾驶员脱手直到B1型ACSF退出;
(3)在Vsmin-20km/h和Vsmax-10km/h/130km/h的车速之间重复上述测试。——如果脱手15s内,发出光学警告信号,脱手30s,发生声音警告信号,声音警告持续30s,B1型ACSF退出,并发出区别于前述的声音提醒并持续至少5s,那么测试通过。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
