




 广告
广告





















































UN/ECE R79,辅助转向领域的“大百科”(下)

三、C型ACSF
C型ACSF对应的常见功能为自动变道(Auto Lane Change,ALC),可以按驾驶员指定方向进行变道,也就是俗称的拨杆变道。
C型ACSF在整车上电时默认关闭,驾驶员可使用车辆提供的操作方式打开和关闭C型ACSF,操作方式可以和B型ACSF类似。
配置有C型ACSF的车辆,需要同时配置有B1型ACSF,这也意味着具备自动变道功能的车辆,需要同时支持车道保持功能。C型ACSF打开后,B1型ACSF随之激活,并控制车辆保持车道内行驶。这意味着C型ACSF的打开条件要覆盖B1型ACSF的激活条件。
与B1型ACSF一样,C型ACSF激活后,也允许驾驶员进行超控,且驾驶员超控需要的转向力不超过50N,被超控的C型ACSF保持打开状态。
横向加速度要求
在整个变道过程,由变道引起的横向加速度不应超过1m/s2(不考虑道路曲率引起的横向加速度),而引起的总的最大横向加速度不得超过表1中定义的值,1s内横向加速度平均变化率不得超过5m/s3。
HMI要求
C型ACSF打开及激活后,系统均应通过光学信号对驾驶员进行提醒。
当变道过程被抑制的时候,系统应通过光学和声音或触觉组合警告信号来对驾驶员进行提醒。如果抑制是由于驾驶员触发的,那么只用光学警告信号也可以。
系统发生失效后,需要通过光学警告信号对驾驶员进行提醒。如果此时驾驶员手动关闭功能,失效警告信号应被挂起。如果失效是发生在变道过程,那么需要通过光学和声音或触觉组合警告信号来对驾驶员进行提醒。
变道过程开始后,需要能够对驾驶员是否手握方向盘进行检测。如果检测到驾驶员3s内未手握方向盘,应通过光学警告信号对驾驶员进行提醒,直到检测到驾驶员手握方向盘或系统被关闭。
变道过程
C型ACSF打开,且B1型ACSF激活(车辆正在进行车道保持行驶),如果这个时候驾驶员打转向灯,那么系统将进入变道过程。进入变道过程之后,B1型ACSF将被抑制,且在横向移动开始之前的车道保持任务将交由C型ACSF负责。
进入变道过程之后,车辆在1s后才能开始车道内横移(变道准备过程),在3~5s内才能越过车道线(前轮)开始换道横移(变道执行过程)。对M1/N1类型车辆,换道横移启动后要在5s内完成变道;对于M2/M3/N2/N3来说,要在10s内完成。换道横移完成之后,B1型ACSF要恢复激活,重新夺回对车道保持的控制,整体逻辑如图5所示。
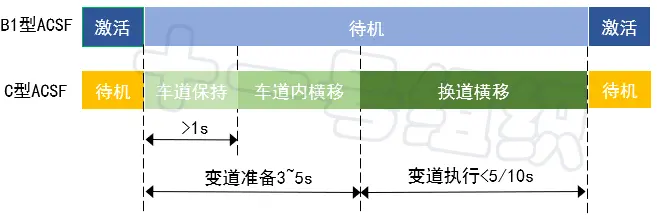
图5 变道过程整体逻辑
在变道过程,转向灯需要保持打开状态,而在变道完成,B型ACSF恢复激活之后,要控制转向灯在0.5s内关闭。
功能抑制
以下任一条件发生时,变道过程将被抑制:
(1)发生下文定义的紧急工况。
(2)驾驶员主动超控或关闭。
(3)超出设计运行范围(道路车道线缺失等)。
(4)未检测到驾驶员手握方向盘。
(5)驾驶员关闭转向灯。
(6)换道横移没有在5s内启动。
(7)横向移动不够连续。
紧急工况
换道横移执行后,当车辆与后方接近车辆的距离小于Scritial时,则认为紧急工况。

其中:vrear为接近车辆的真实速度或130km/h,取两者中较小值;vACSF为车辆的真实速度;a为接近车辆减速度,取3m/s2;tb取0.4s;tG取1s。
针对紧急工况以及上述公式的通俗解释是:目标变道车道后方接近车辆在车辆换道横移开始后,如果必须以大于3m/s2的减速度减速,这样才能保证在车辆换道横移开始0.4s后,两者之间的车间距不小于车辆行驶1s的距离。
最小探测距离和运行速度
车辆要能够探测到相邻车道的后方接近车辆,最小探测距离Srear不小于55m。
车辆可以启动换道横移的最小速度Vsmin可以用如下公式求得:

其中,Srear为主机厂定义的后方最小探测距离;Vapp为接近车辆的速度,取36.1m/s或车辆在某地区允许的最高速度;a为接近车辆减速度,取3m/s2;tb取0.4s;tG取1s。
车辆速度低于Vsmin时,满足以下条件时,也允许启动换道横移:
(1)车辆与相邻车道后方接近车辆的距离小于车辆可探测的最小距离Srear;且
(2)非紧急工况,即车辆与相邻车道后方接近车辆的距离小于Vsmin。
每次整车上电启动后,C型ASCF至少要在大于最小探测距离Srear的位置检测到一次移动目标后,才允许直行执行操作。
C型ACSF要能检测传感器是否被灰尘、雨雪遮挡,一旦检测到遮挡发生,变道执行应被禁止,且将状态告知驾驶员,告知方式可同系统失效时的警告信号。
测试要求
变道功能测试步骤及通过要求:
(1)测试道路为水平直道,至少包含两条同向车道,每条车道两侧均有车道线;
(2)测试车辆速度取Vsmin+10km/h;
(3)C型ACSF打开,后方车辆由远及近接近测试车辆,从而唤醒测试车辆变道功能(测试车载在第一次上电后,要能在大于最小探测距离Srear的位置检测到一次移动目标后,才允许激活变道过程);
(4)接近车辆行驶直至完全超过测试车辆;
(5)驾驶员打转向灯激活变道过程(左变道、右变道各进行一次试验)。
当以下条件满足时,测试通过:
(1)驾驶员触发变道过程后,被测车辆在1s后启动车道内横移;
(2)车道内横移以及换道横移是一个连续的移动;
(3)变道过程横向加速度不超过1m/s2,0.5s内横向加速度变化率不超过5m/s3;
(4)变道过程开始后,被测车辆在3~5s内启动换道横移;
(5)系统通过提醒告知驾驶员变道过程正在进行;
(6)换道横移启动后5s/10s内完成整个变道过程;
(7)变道过程结束后,B1型ACSF恢复激活;
(8)转向灯在变道过程结束前不得关闭,在B1型ACSF恢复激活0.5s内关闭。
最小激活速度测试步骤及通过要求:
(1)最小激活速度Vsmin由Vapp取130km/h计算得到或基于当地最高限速(<130km/h)计算得到;
(2)测试道路为水平直道,至少包含两条同向车道,每条车道两侧均有车道线;
(3)测试车辆速度取Vsmin-10km/h和Vsmin+10km/h,分别进行测试;
(4)C型ACSF打开,后方车辆由远及近接近测试车辆,从而唤醒测试车辆变道功能(测试车载在第一次上电后,要能在大于最小探测距离Srear的位置检测到一次移动目标后,才允许激活变道过程);
(5)接近车辆行驶直至完全超过测试车辆;
(6)驾驶员打转向灯激活变道过程。——如果被测车辆速度为Vsmin-10km/h时无法激活变道过程,被车辆速度为Vsmin+10km/h时可以激活变道过程,测试通过。
超控测试步骤及通过要求:
(1)测试道路为水平直道,至少包含两条同向车道,每条车道两侧均有车道线;
(2)测试车辆速度取Vsmin+10km/h;
(3)C型ACSF打开,后方车辆由远及近接近测试车辆,从而唤醒测试车辆变道功能(测试车载在第一次上电后,要能在大于最小探测距离Srear的位置检测到一次移动目标后,才允许激活变道过程);
(4)接近车辆行驶直至完全超过测试车辆;
(5)驾驶员打转向灯激活变道过程;
(6)驾驶员通过控制方向盘让测试车辆保持车道内直线行驶。——如果驾驶员施加在转向盘上力小于50N,测试通过。
变道过程抑制测试步骤及通过要求:
(1)测试道路为水平直道,至少包含两条同向车道,每条车道两侧均有车道线;
(2)测试车辆速度取Vsmin+10km/h;
(3)C型ACSF打开,后方车辆由远及近接近测试车辆,从而唤醒测试车辆变道功能(测试车载在第一次上电后,要能在大于最小探测距离Srear的位置检测到一次移动目标后,才允许激活变道过程);
(4)接近车辆行驶直至完全超过测试车辆;
(5)驾驶员打转向灯激活变道过程;
(6)变道过程启动,变道执行未启动过程,重复一下测试条目,如果变道过程被抑制,测试通过:
(a)驾驶员主动超控或关闭。
(b)车速降低到Vsmin-10km/h。
(c)驾驶员手离反向盘直至激活脱手报警。
(d)驾驶员关闭转向灯。
(e)换道横移没有在5s内启动。
传感器性能测试过程及通过条件:
(1)测试道路为水平直道,至少包含两条同向车道,每条车道两侧均有车道线;
(2)测试车辆速度取Vsmin+10km/h;
(3)C型ACSF打开,相邻车道后方接近车辆以120km/h行驶。——如果在不小于车企声明的传感器最小探测距离Srear探测到接近车辆,那么测试通过。
传感器遮挡测试步骤及通过要求:
(1)测试道路为水平直道,至少包含两条同向车道,每条车道两侧均有车道线;
(2)测试车辆速度取Vsmin+10km/h;
(3)C型ACSF打开,后方车辆由远及近接近测试车辆,从而唤醒测试车辆变道功能(测试车载在第一次上电后,要能在大于最小探测距离Srear的位置检测到一次移动目标后,才允许激活变道过程);
(4)接近车辆行驶直至完全超过测试车辆;
(5)传感器发生遮挡;
(6)驾驶员打转向灯激活变道过程;——如果测试检测探测到传感器发生遮挡且对驾驶员进行提醒且无法激活变道过程,那么测试通过。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
