




 广告
广告





















































重卡安全评级测试协议-《避免前方碰撞(车对人)》E-NCAP

斯堪尼亚已明确表示欢迎E-NCAP的重型车辆测试评级计划。
据信C-NCAP也在积极研讨开展中国卡车安全测试评级。
随着信息公开化的发展,今后的安全与其他功能、特性相关测试可能不再局限于强标,未来也许也会有“懂卡车帝”组织的测试,各大卡车厂家还是应该加以关注,毕竟即关乎产品安全特性,又关乎产品美誉度和销量。
2024年5月15日,Euro-NCAP卡车安全计划(Truck Safe Programme)发布首批技术协议。
此前,欧洲Euro NCAP于2024年4月24日正式宣布卡车安全评级计划(Heavy Truck safety rating tests),这次是相应的卡车安全测试技术协议。

发布技术协议包括:
安全驾驶-测试协议
·乘员监测v1.0
·视觉v1.0
·车辆辅助-自适应巡航控制v1.0
·车辆辅助-速度辅助系统v1.0
防撞-测试协议
·正面碰撞-卡车与车辆v1.0
·正面碰撞-卡车与易受伤害的道路使用者v1.0
·车道偏离碰撞v1.0
碰撞后-技术公告
·救援信息-救援表和救援指南v1.0
Euro-NCAP卡车安全计划
重卡安全安全法规在快速发展。
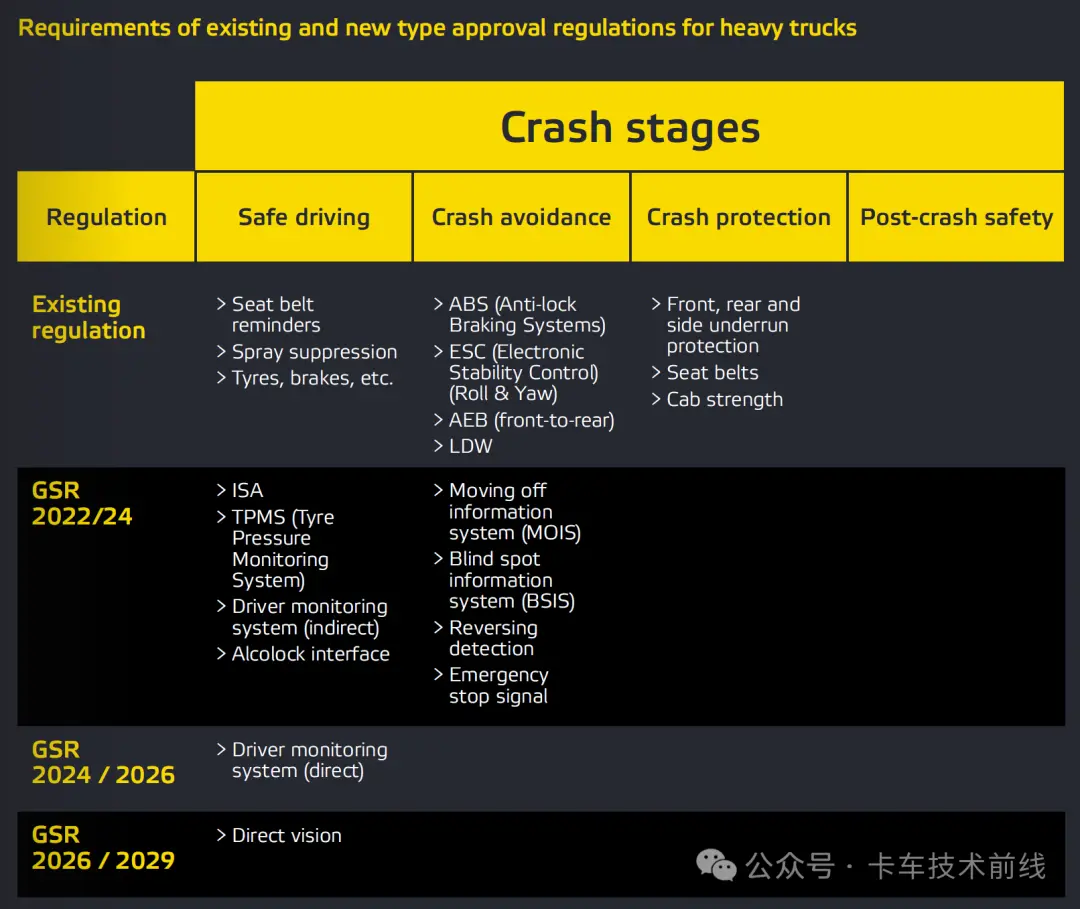
欧洲NCAP的新卡车安全评级计划将是该行业的首个计划,并将使货运行业的所有利益相关者能够识别和评估卡车的安全水平。

2027年,将需要提高操纵方面的主动安全要求;到2030年,欧洲NCAP将开始对卡车进行碰撞测试,以鼓励更好的被动安全保护。这些车辆将按行业进行测试,重点是城市配送、高速公路配送、长途运输以及翻斗车和垃圾车。
评级的首次公布将于2024年11月公布。欧洲NCAP计划在2024-2025年冬季提供第一组测试卡车的结果。

评级方法
·提供简单易懂的安全信息
·与乘用车、面包车保持一致性
·评级优先考虑碰撞预防,计划针对被动安全
·总体评级并提供补充信息以强调适应性,例如城市安全和电动汽车
·三年更新周期
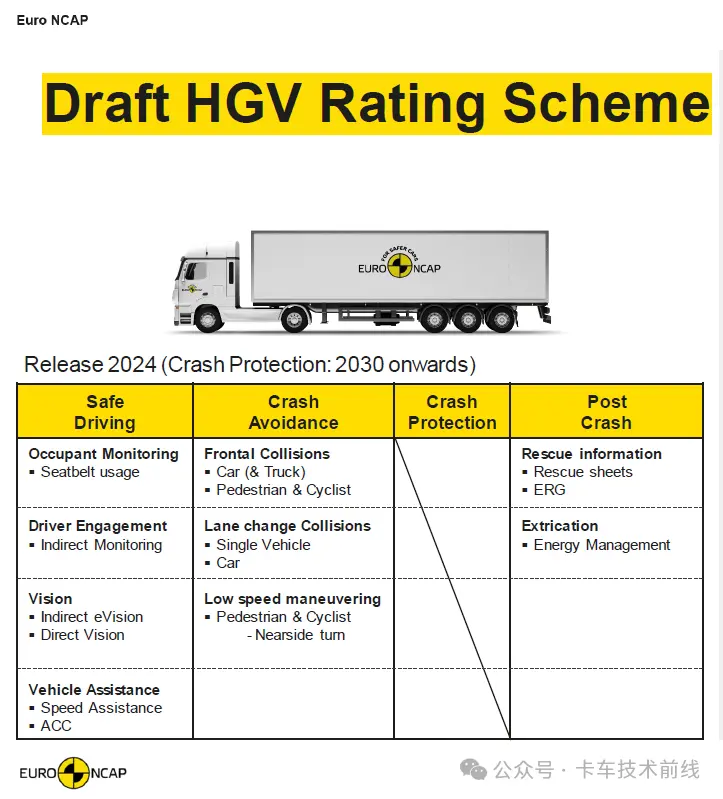
测试协议范围及流程
初步评价范围覆盖
2024年发布包括安全驾驶和避免碰撞、碰撞后,碰撞保护(被动安全)相关计划在2030年之后实施。随着制造商对测试的响应,需求将不断发展变化。
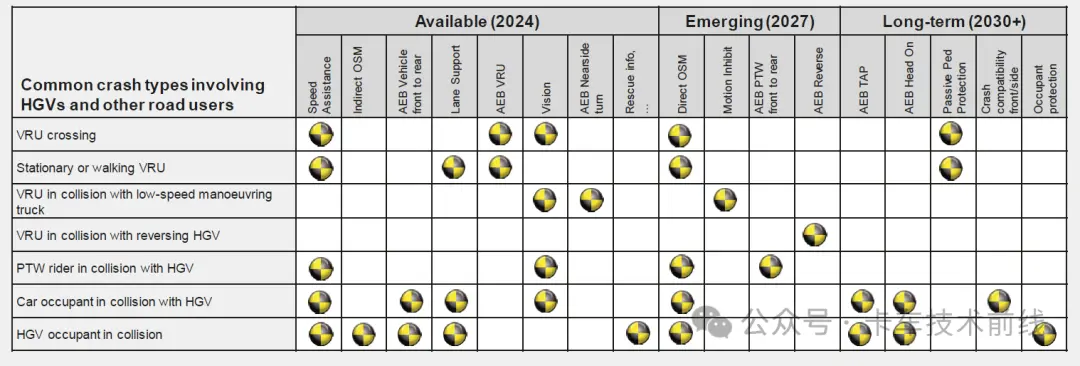
测试将通过技术匹配碰撞事故类型,推进改善预防措施。
测试涉及技术领域及时间计划如下表。
其他评估
直接视野、间接视野、智能速度自适应、驾驶员监控、安全带提醒、急救人员的救援信息。
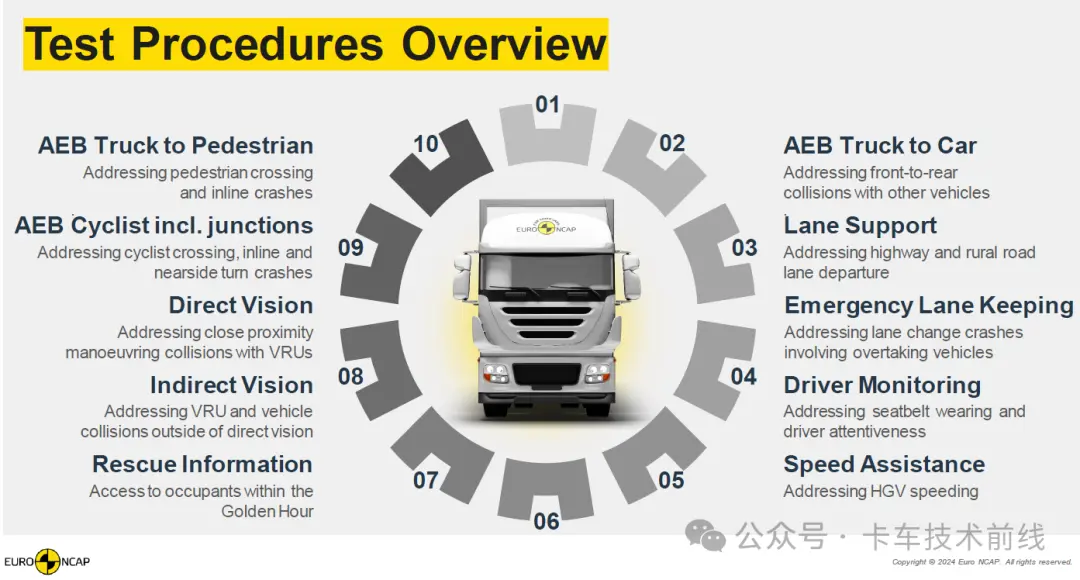
卡车测试流程概览
包括AEB(对乘用车、行人、自行车、路口)、车道支持、车道保持、驾驶员监测、车速辅助、直接视野、救援信息等。
基于Haddon矩阵,改编自2026年的乘用车测试计划,为“城市安全”定义标准,旨在奖励技术或设计能够解决典型VRU碰撞的车辆,包括直接和间接视觉要求解决方案,推广救援信息Euro Rescue app。
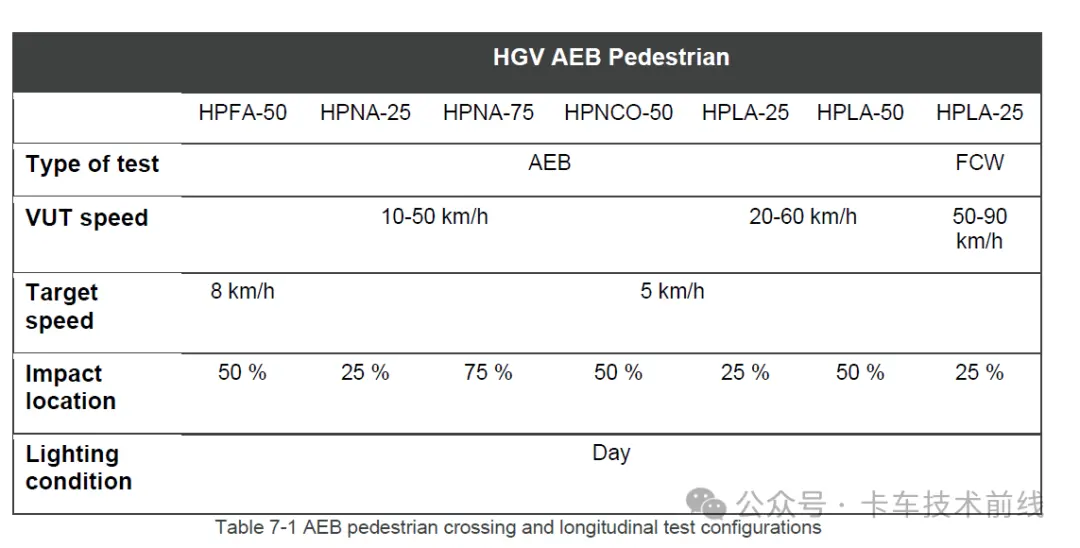
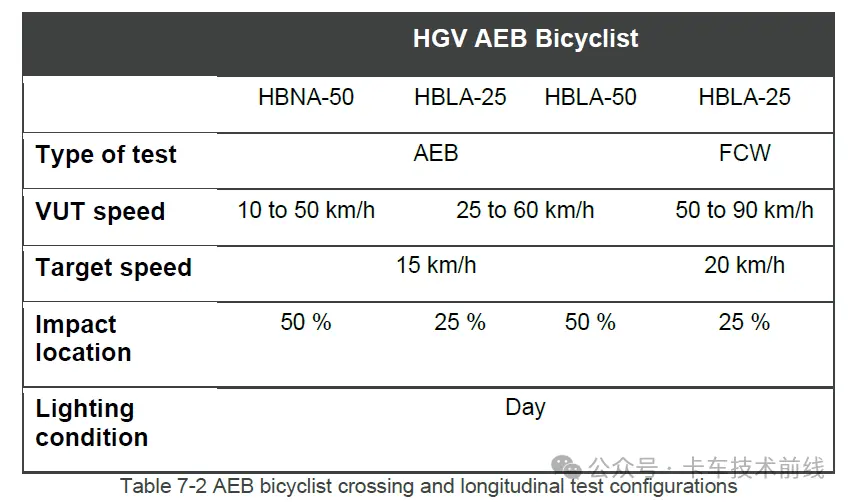
发布协议示例-避免前方碰撞 (卡车对行人、骑行人)
前方碰撞-卡车对VRU,Collision Avoidance Frontal Collisions - Truck-to-Vulnerable Road User
Test Protocol
Implementation November 2024.
引言
对欧洲道路交通事故数据的分析显示,在重型货车碰撞中,与行人的碰撞占死亡人数的16%,骑自行车的占10%。
典型的事故发生在繁忙的城市环境中,当重型货车低速行驶或转弯时,与行人或骑自行车的人发生冲突。
为了支持驾驶员避免与VRU发生碰撞,车辆制造商提供了防撞技术,该技术可监测道路和交通环境,并能够警告驾驶员即将发生碰撞,支持充分制动和/或最终自行停车。
虽然法规规定AEB VRU是2028年新HGV的强制性要求,但欧洲NCAP努力提前加快安装速度,并推动性能改进,以确保在广泛的现实世界碰撞类型中稳健有效地运行。为此,欧洲NCAP计划通过以下方式建立在监管要求的基础上:
结合其他具有挑战性的现实世界碰撞场景,包括步行和跑步的成人和儿童行人、骑自行车的人、偏离重型货车中心线的碰撞点以及令人想起城市环境的视线障碍物
奖励当重型货车在关键的近侧转弯碰撞中与VRU发生冲突时,自动干预以施加制动的系统(在这种情况下,法规只需要信息和警告)
通过为在更高测试速度下避免碰撞提供最大奖励,鼓励更高速度的操作和性能
本协议规定了测试程序,用于以可重复和可重复的方式评估HGV安全评级方案的系统性能。
目录
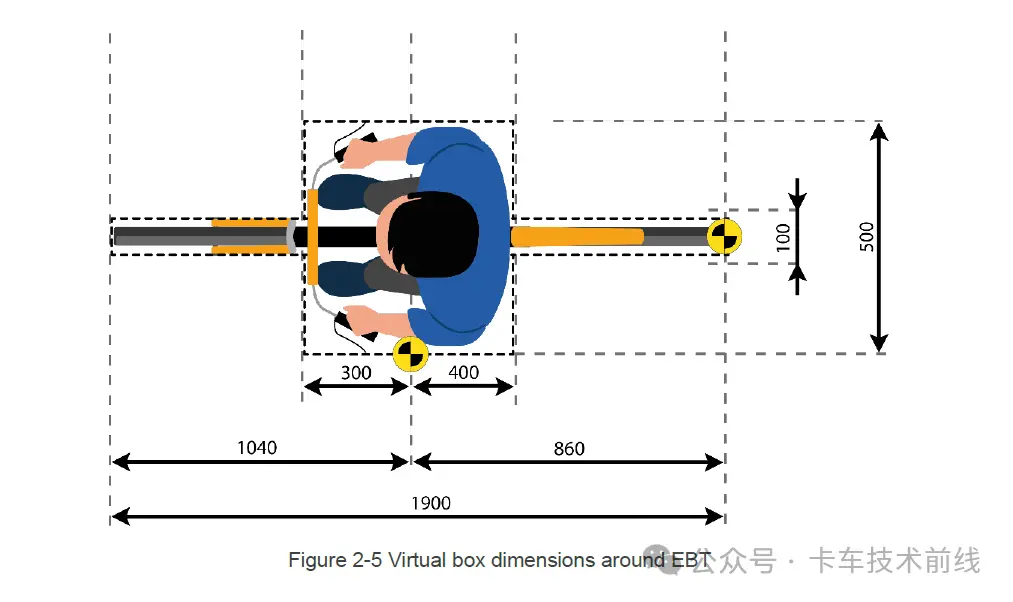
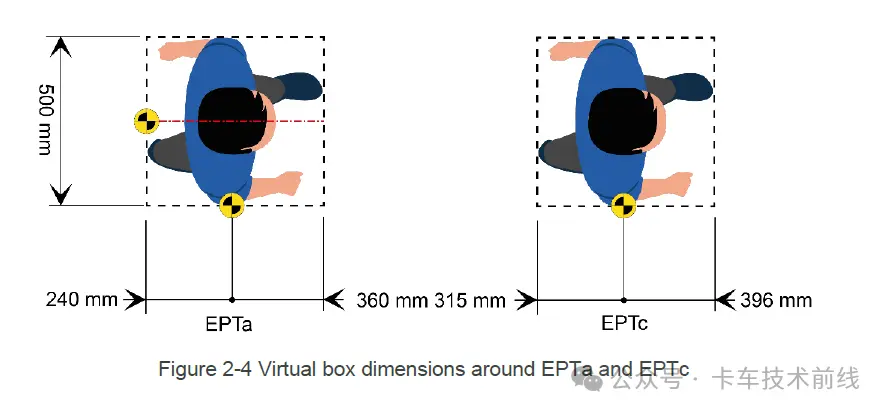
为了确保可重复的结果,推进系统和VRU目标必须满足ISO 19206《道路车辆——目标车辆、易受伤害道路使用者和其他物体的测试装置》中详细说明的要求,以评估主动安全功能:
-第2:2018部分:行人目标要求(仅限铰接目标)
-第4:2018部分:自行车目标要求
EPT和EBT设计用于与以下类型的传感器配合使用:
-雷达(24和76至81 GHz)
-激光雷达
-照相机
-超声波传感器

测试场地要求
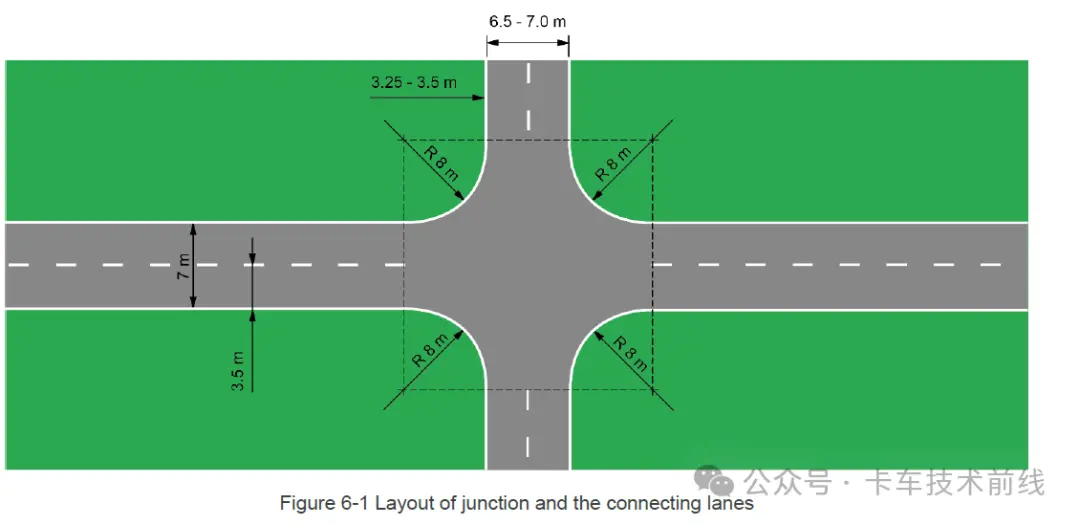
周围的环境
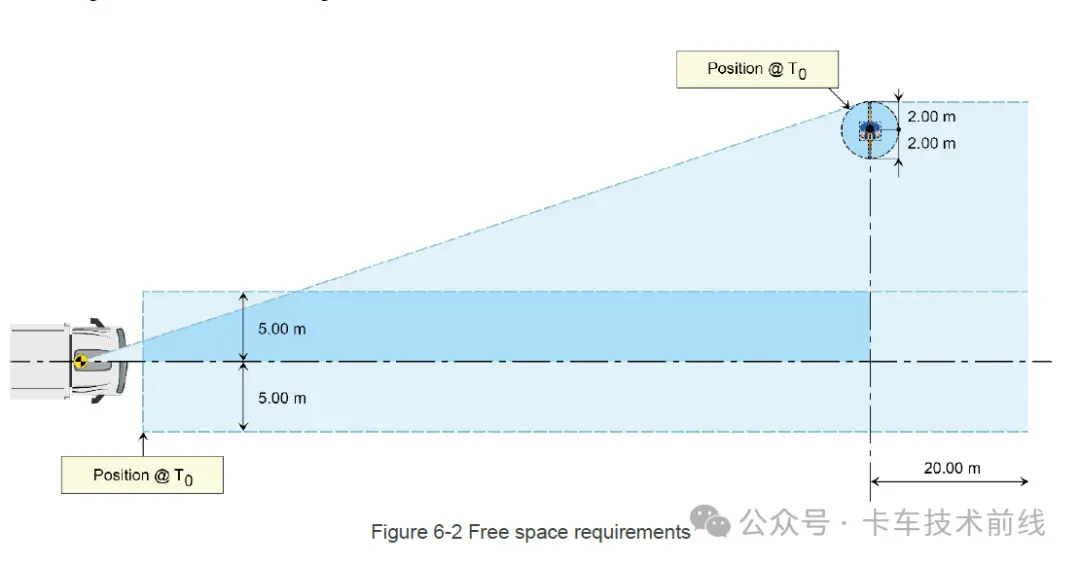
进行测试时,不得有其他车辆、公路基础设施、障碍物(测试场景中详细说明的情况除外)、其他物体或人员突出到测试表面上方,从而可能导致以下范围内的传感器测量异常:
-在测试的整个持续时间期间VUT测试路径的任一侧5m,并且当测试结束时在VUT前方20m的纵向距离内,
-围绕VRU目标的半径为2m的圆,以及
-VUT几何中心和VRU目标周围圆之间的视轴,如图6-2所示。
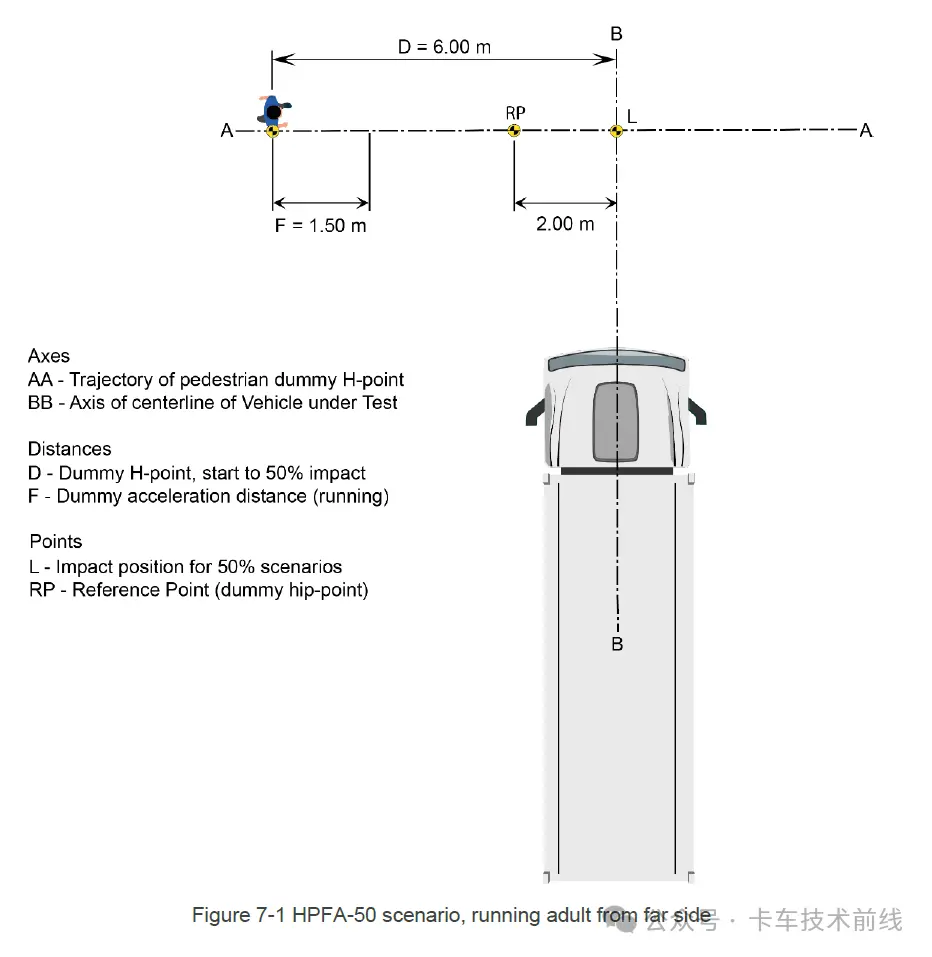
成年人远前侧方跑过场景
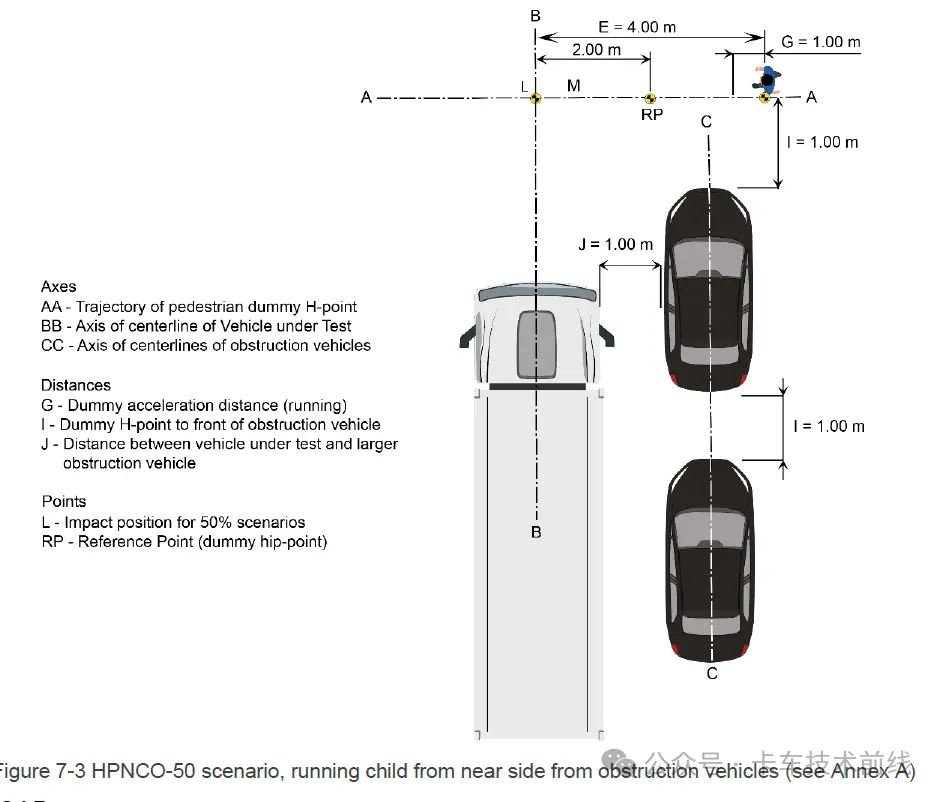
儿童从乘客侧前方跑动,有车辆遮挡
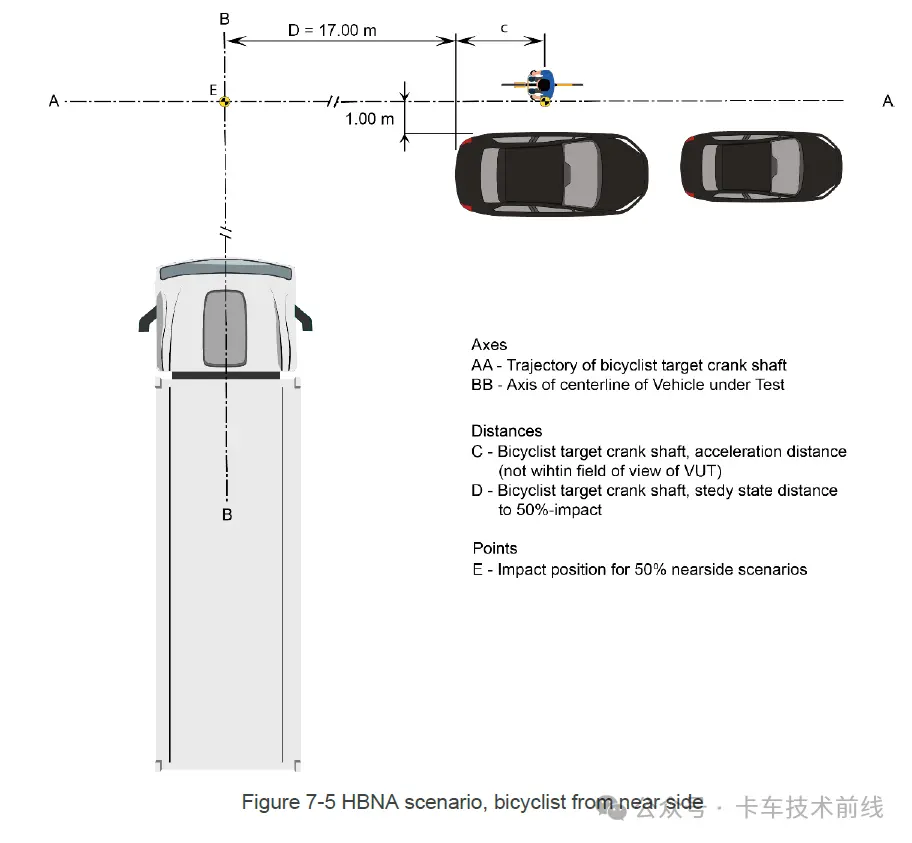
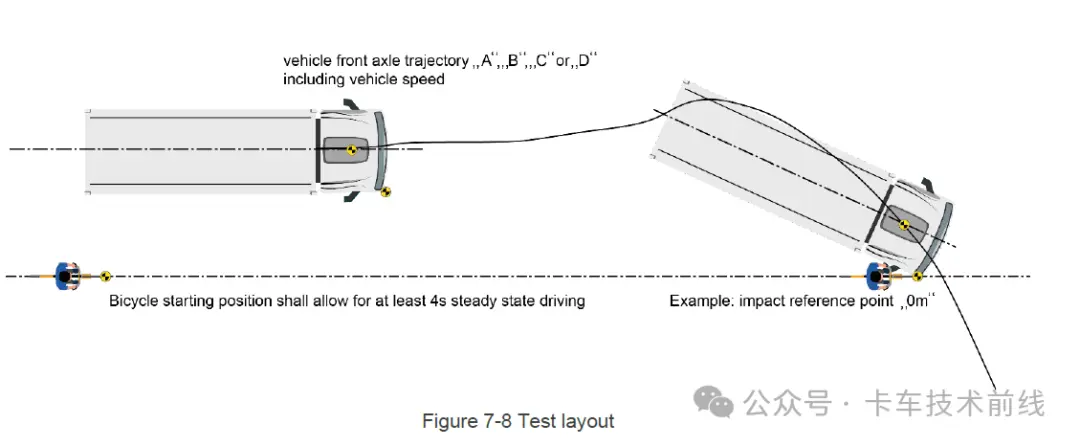
骑车人乘客侧场景
注意:以上仅为协议部分内容摘介,仅供参考。其实就是AEB测试的一部分,分成了对车对人两个测试协议。
- 下一篇:欧亚经济联盟EAEU对汽车的准入认证要求
- 上一篇:常见的阻尼类型







最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
