




 广告
广告





















































Nodar让泊车辅助技术更智能、更廉价、更简便

在辅助和自动驾驶领域,泊车辅助技术似乎是唾手可得的成果,但任何试图使用这些系统的人可能很快就会意识到,目前的解决方案并不容易使用,也没有发挥出它们应该发挥的功能。
Nodar首席执行官兼创始人Leaf Jiang在AutoSens USA 2024大会上表示,多年来司机一直在抱怨自动泊车功能的各种问题,但毕竟这是个20亿美元的市场,预计在2023年至2030年期间将以17.5%的复合年增长率增长,所以不断改进技术才是出路。这也是Jiang希望Nodar重新通过Hammerhead立体相机定位技术,来配合泊车辅助技术的原因之一。
“我觉得今天使用这些系统的用户希望厂家能做得更好。”Jiang说,“我认为,我们大多数人泊车时,可能两次中就有一次汽车能完成自动泊车。”
Nodar在Hammerhead上使用的是车规级CMOS摄像头,而泊车辅助软件版本将利用车辆内置的环视摄像头作为立体成像组合来预估3D点云。Jiang说这些不受约束、独立安装的摄像机所需的软件具备三个主要功能:高级校准(由Nodar编写并可以逐帧校准摄像机)、视角失真以及从道路表面等低纹理环境中收集信息的能力。
Jiang展示了一个视频,两个宽基线,500万像素的摄像头每秒生成5000万个点。他说:“一个重建得很好的点云,可以更容易地帮助物体检测并了解车辆周围的情况从而规划路径。要知道,以往的立体视觉算法无法生成如此清晰的点云。”
测试开展中
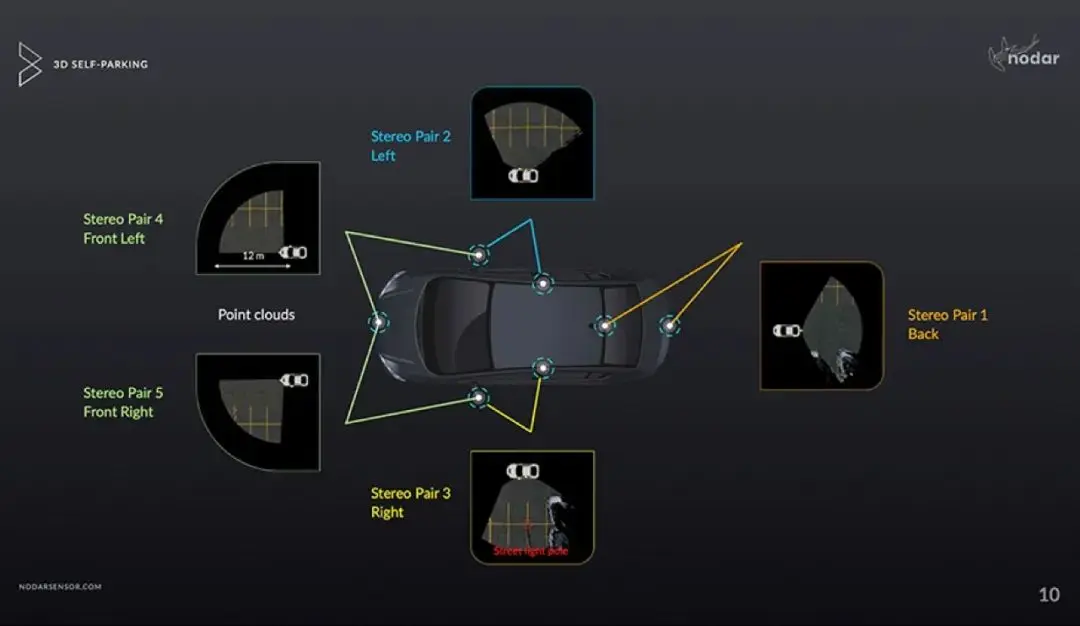
Nodar一直在与一家神秘的OEM合作,将车辆周围的180度或120度视野普通摄像头配对,由五对立体摄像头组成,形成360度的汽车视野:两对使用前置摄像头,一对使用侧后视镜,一对使用B柱上的摄像头和相应的侧后视镜,最后一对在后面使用后车顶上的摄像头和下方安装的备用摄像头。
“这种技术不需要水平相机,你甚至不需要把它们放在同一个平面上。主机厂可以比较随意地进行布置,最终这五个区域的影响合成到一起生成特定的点云,显示出沥青路面的重建,车道线和周围的车辆。其射程约为12米(39英尺)。”他说。反观目前用于泊车辅助系统的超声波传感器,通常被限制在2到4米(6.5-13英尺)。
当以每秒25帧的速度整合来自摄像头的数据时,就能生成一个聚合的点云,显示出车辆可停泊的位置。Jiang说,该系统的亚毫米精度在4米以内,“毫米级”精度可达12米。
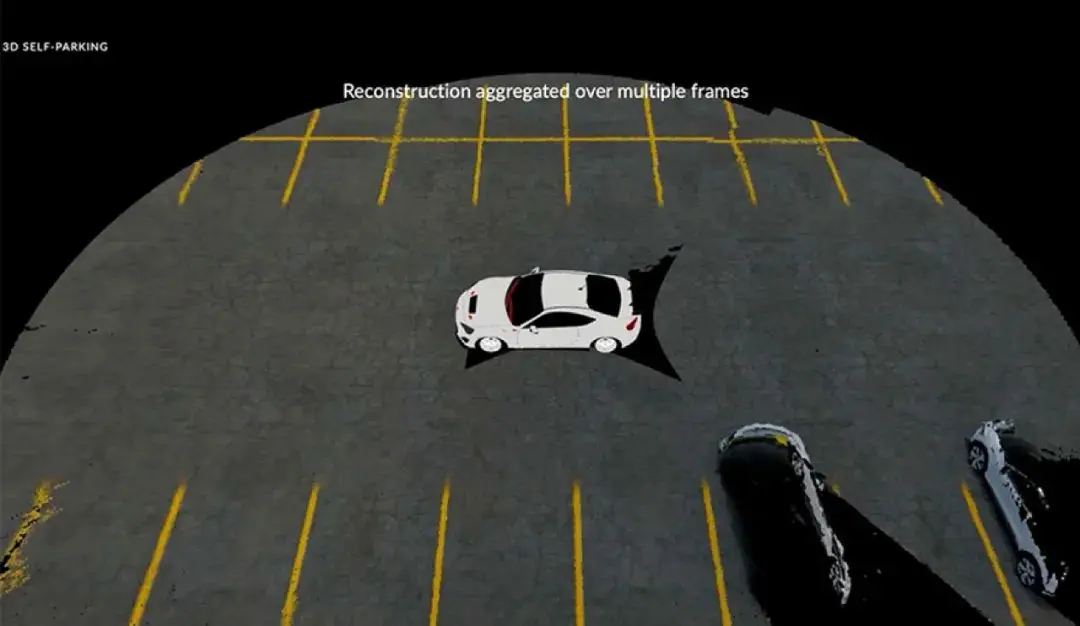
“有了这样的分辨率,这样的密度,泊车就变成超级简单的问题了。”Jiang说,“车主可以非常清楚地看到所有东西的位置,知道地面上放置着什么。我们希望这能让道路规划者很容易决定在哪里停车。”
Nodar的无约束摄像头解决方案将与二级泊车辅助系统配合使用,二级泊车辅助系统依赖于人类驾驶员的注意力,如果与冗余传感器套件(如摄像头+雷达或摄像头+超声波等)配对,则可用于三级及以上的自动驾驶系统。
Nodar是“原生光学距离和测距” (Native optical distanceand ranging)的缩写,成立于2018年。该公司已从New Enterprise Associates和Rapsody VenturePartners等机构融资1,450万美元,AutoSens美国公司的Jiang表示,该公司将很快在德国开设办事处。
使用无约束摄像头来定义停车辅助功能也将消除人们对当前系统的另一则诟病。Jiang说今天的许多系统使用8到12个超声波传感器,这些传感器经常检测到周围有“杂质”,这是客户不喜欢的。他说Nodar的系统也比单摄像头更可靠,单摄像头需要移动才能获得运动结构(SfM)功能,而且通常不准确。
Jiang说,未来停车辅助系统的另一个主要选择是激光雷达,它在距离方面表现良好,但“在物料成本方面存在挑战”。雷达对距离测量也很有用,但由于停车辅助系统需要能够看到地面上绘制的线条,单雷达有局限性,因此需要视觉摄像头作为整体系统的一部分。
- 下一篇:高端人才招聘-汽车安全性能专家
- 上一篇:中汽研科技智能IC卡检测能力



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
