




 广告
广告





















































R138电动车辆低速提示音AVAS法规解读及认证测试要求(下)

1.适用范围
2.定义(本法规)
3.R138对AVAS的要求
4.R138对AVAS的测试仪器和方法
3 车辆声级测试程序
3.1 麦克风位置
测试轨道上或室内测试设施中,传声器线PP上的传声器位置到垂直参考线CC的距离应为2.0±0.05米。
麦克风应位于地面以上1.2±0.02米。IEC 61672-1:2013规定的自由场条件参考方向应为水平方向,并垂直指向车辆线路CC'的路径。
声学中的自由场:只有直达声没有反射声的声场,如开阔的旷野、消声室。
声学中的扩散场:声能量均匀分、并在各个传播方向上做无规则传播的声场,又称混响场,如混响室。混响室的四壁均用反射性很强的材料制作,不管生源处于室内任何位置室内各处声压接近相等,声能密度处于均匀,可用于测量材料的隔声、吸声性能、声源声功率。
声学中的压力场:当声波的波长比所处腔体空间大时,声压压力分布均匀,此时称为压力场。如声学校准器,手机话筒等小空间。当传声器插入声压级校准器中时,即是压力场。
3.2 车辆状况
3.2.1 一般条件
车辆应代表制造商与技术服务部门达成协议后指定投放市场的车辆,以满足本法规的要求。
测量应在没有任何拖车的情况下进行,除非是不可分离的车辆。
在HEV/FCHV的情况下,测试应在最节能的模式下进行,以避免内燃机重新启动,例如,所有音频、娱乐、通信和导航系统都应关闭。
在开始测量之前,应将车辆调整到其正常运行状态。
3.2.2 动力电池状态
如果配备了这种设备,动力电池应具有足够高的电量,以根据制造商的要求启用所有关键功能。动力电池应在其最佳工作温度范围内,以启用所有可以减少车辆声音排放的关键功能。任何其他类型的可充电储能系统应在测试期间准备好运行。
3.2.3 多模式操作
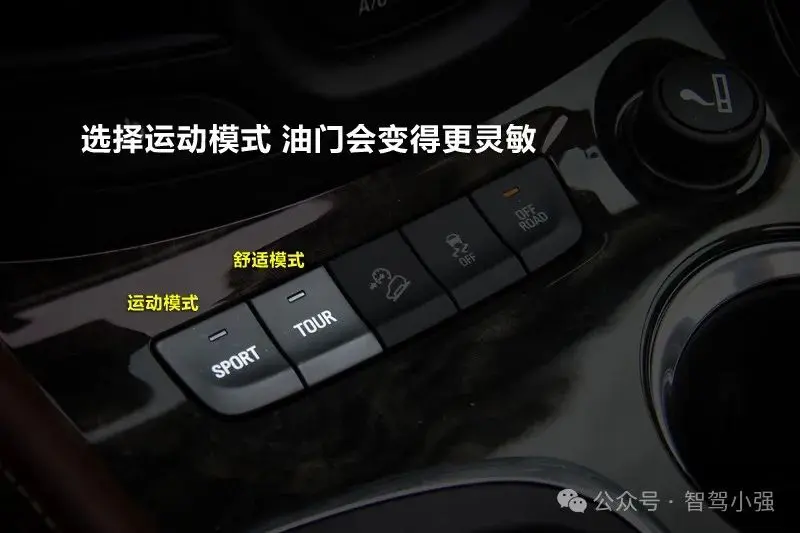
如果车辆配备了多种驾驶员可选择的操作模式(如运动模式、经济模式、越野模式等),则应选择在段落3.3的测试条件下提供最低噪声排放的模式。
当车辆提供由车辆自动选择的多种操作模式时,制造商有责任确定正确的测试方式以实现最小的声音排放。
在无法确定提供最低声音排放的车辆运行模式的情况下,应测试所有模式,并使用最低测试结果的模式进行本法规的合规测试。
3.2.4 车辆的试验质量
应以车辆行驶质量进行测试,允许15%的公差。
行驶质量是指车辆的空载质量外加驾驶员的质量(75kg),其油箱至少填充到其容量的90%,其他液体(制动液、冷却液、润滑液等)需为加满状态,配备了符合制造商规格的标准设备(驾驶室、备胎以及工具)的质量。
3.2.5 轮胎的选择和状态
测试期间安装在车辆上的轮胎由车辆制造商选择,并应符合车辆制造商为车辆指定的轮胎尺寸和类型之一。轮胎应充气至车辆制造商为车辆测试质量建议的压力。
3.3 操作条件
3.3.1 一般要求
对于每种运行条件,车辆可以在室内或室外进行测试。
对于恒速和倒车测试,车辆可以在运动或模拟运行条件下进行测试。对于模拟车辆运行,应向车辆施加信号以模拟实际使用操作。
如果车辆装有内燃机,则应将其关闭。
3.3.2 恒速试验
这些测试是在车辆处于前进状态时进行的,或者在车辆处于静止状态时,通过向AVAS发送外部信号来模拟车速。
3.3.2.1 向前运动的恒速试验
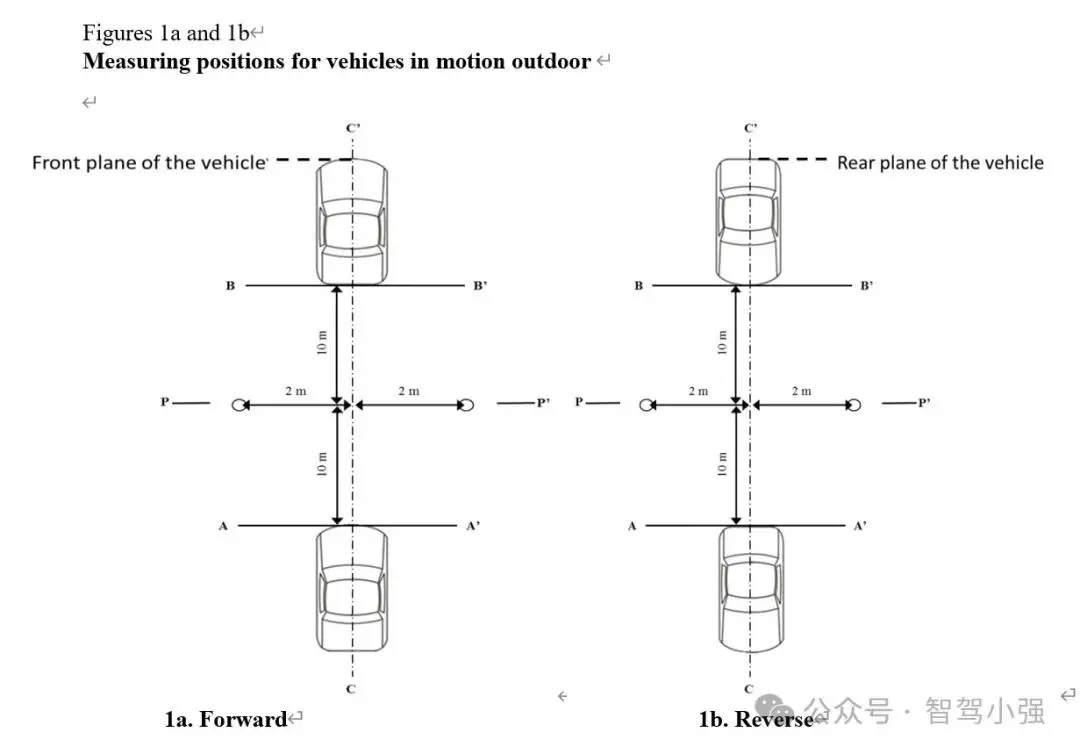
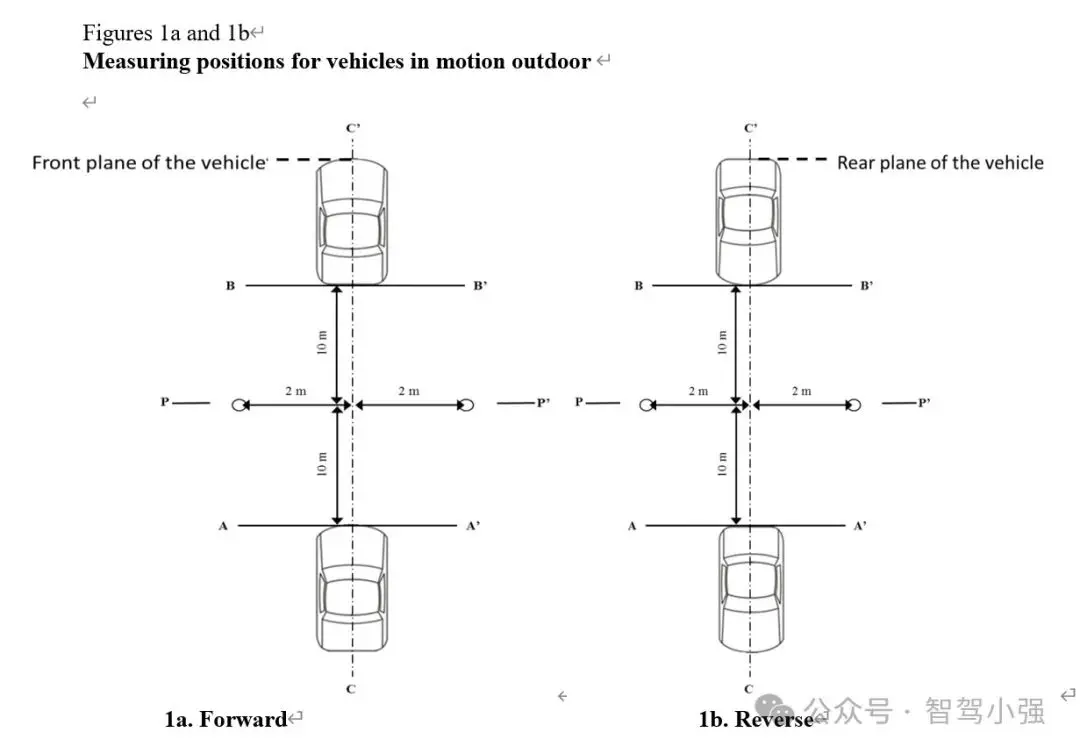
对于在室外设施测试的车辆,车辆中心线的路径应在整个测试过程中尽可能靠近CC线。车辆的前平面应从测试开始时的AA线通过,车辆的后平面应从测试结束时的BB线通过,如图1a所示。在考虑越过BB线时,任何不能轻易分离的拖车都应被忽略。

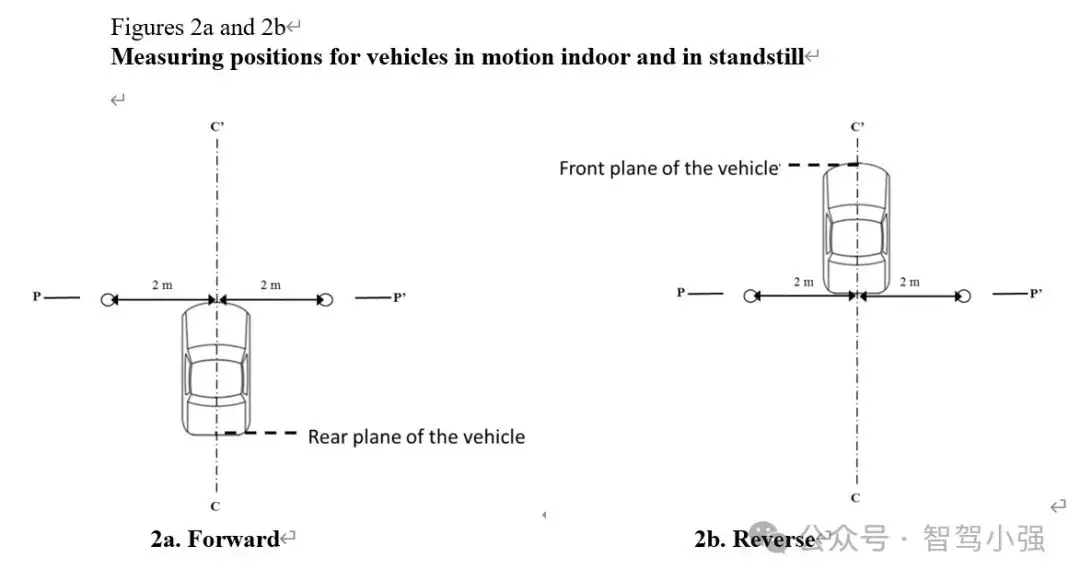
在室内设施测试的车辆,其前平面应位于图2a所示的PP线上。车辆应保持恒定的测试速度vtest至少5秒。
对于10 km/h的恒速试验条件,试验速度vtest应为10 km/h±2 km/h。
对于20 km/h的恒速试验条件,试验速度vtest应为20 km/h±1 km/h。
对于自动变速器车辆,档位选择器应按制造商规定放置,以便正常行驶。
对于手动变速器车辆,档位选择器应放置在最高档位,以达到恒定发动机速度的目标车速。
3.3.2.2 车辆处于静止状态时,通过AVAS的外部信号模拟的恒速测试
在室内或室外设施测试的车辆,其前平面应位于图2b所示的PP线上。车辆应保持恒定的模拟测试速度vtest至少5秒。
对于10 km/h的恒速试验条件,模拟试验速度vtest应为10 km/h±0.5 km/h。
对于20 km/h的恒速试验条件,模拟试验速度vtest应为20 km/h±0.5 km/h。
3.3.3 倒车试验
这些测试可以在车辆向后运动的情况下进行,也可以在车辆处于静止状态的情况下通过向AVAS发送外部信号来模拟车速。
3.3.3.1 运动中的倒车试验
对于在室外设施测试的车辆,车辆中心线的路径应在整个测试过程中尽可能靠近CC线。如图1b所示,车辆的后平面应从测试开始时的AA线通过,车辆的前平面应从测试结束时的BB线通过。在考虑越过线BB时,任何不能轻易分离的拖车都应被忽略。
在室内设施测试的车辆,应位于车辆后平面PP线,如图2b所示。车辆应保持恒定测试速度vtest至少5秒。
对于6 km/h的恒速试验条件,试验速度vtest应为6 km/h±2 km/h。
对于自动变速器车辆,档位选择器应按照制造商的规定放置,以便正常逆向行驶。
对于手动变速器车辆,档位选择器应放置在最高倒档,以达到恒定发动机速度的目标车速。

3.3.3.2 车辆处于静止状态时,通过向AVAS发出的外部信号模拟的倒车试验
在室内或室外设施进行测试的车辆,其后部平面应位于图2b所示的PP线上。车辆应保持恒定的模拟测试速度vtest至少5秒。
对于6 km/h的恒定试验条件,模拟试验速度vtest应为6 km/h±0.5 km/h。
3.3.3.3 静止状态下的倒车试验
在室内或室外设施测试的车辆,其后平面应位于图2b所示的PP线上。
车辆的档位选择控制应处于倒车位置,并且为试验松开制动器。
3.4 测量读数和报告值
应在车辆两侧对每种试验条件进行至少四次测量。
每个试验条件的前四个每侧2.0dB(A)以内的有效连续测量结果,应用于中间或最终结果的计算,允许删除无效结果。
如果观察到与一般声压级明显不符的声峰,则应放弃该测量。对于室外行驶(前进和倒车)的车辆的测量,应注意每个麦克风位置在AA'和PP'(Ltest,j)之间的车辆每次通过期间指示的最大A加权声压级,直到小数点后的第一位有效数字(例如XX.X)。对于室内行驶和静止(前进和倒车)的车辆的测量,应注意每个麦克风位置在每个5秒期间指示的最大A加权声压级,Ltest,j,直到小数点后的第一位有效数字(例如XX.X)。
Ltest, j应根据第2.3.2段进行修正,以获得Ltestcorr,j。
对于每个最大A加权声压级,应报告每个麦克风位置对应的三分之一倍频程频谱。不得对任何测量的三分之一倍频程结果应用背景校正。
3.5 实验数据汇编和试验报告
对于3.3段中描述的每个测试条件,背景校正结果Ltestcorr,j和相应的车辆两侧的1/3倍频段应分别进行算术平均并四舍五入到小数点后第一位。
最终要上报的A加权声压级结果Lcrs10、Lcrs20和L倒车为两侧两个平均值的较低值,四舍五入为最接近的整数。最终要上报的1/3倍频段与上报的A加权声压级应对应为同一侧。
4 频移的测试程序
4.1 一般要求
第3章3.2.3中概述的频移规定应使用制造商选择的以下测试方法之一进行检查:
(a)在室外测试轨道上对行驶中的整车进行测试;
(b)通过外部信号发生器模拟车辆运动到AVAS,在室外测试轨道上进行整车静止状态测试;
(c)在底盘测功机上的室内设施中测试整车的运动;
(d)通过外部信号发生器模拟车辆运动到AVAS,在室内设施中进行整车静止状态测试;
(e)在室内设施中测试无车辆的AVAS,通过外部信号发生器模拟车辆移动到AVAS。
设施要求以及车辆和测试设置规格与本章节第1、2、3.1和3.2段中根据所选测试方法给出的相同,除非以下段落提供不同或附加要求。
不得对任何测量应用背景噪音校正。户外测量应特别小心,应避免背景噪音的任何干扰。如果观察到与一般信号明显不符的声音峰值,则应放弃该测量。
4.2 仪表和信号处理
分析仪设置应由制造商和技术服务部门商定,以根据这些要求提供数据。
声音分析系统应能够在采样率和包含所有感兴趣频率的频率范围内进行频谱分析。频率分辨率应足够精确,以区分各种测试条件的频率。
4.3 测试方法
4.3.1 方法(a)-室外设施和行驶中的车辆
车辆应在相同的室外测试设施中运行,并根据与车辆恒速测试相同的一般运行条件(第3.3.2段)。
车辆声音发射应在5km/h至20km/h的目标速度下以5km/h的步长测量,对于10km/h或以下的速度,容差为±2km/h,对于任何其他速度,容差为±1km/h。5km/h的速度是最低目标速度。如果车辆无法在给定精度内以该速度运行,则应使用低于10km/h的最低可能速度。
4.3.2 方法(b)和方法(d)-室外/室内设施和静止车辆
车辆应在测试设施中运行,车辆可以接受AVAS模拟车辆运行的外部车速信号。麦克风位置应符合图2a中规定的整车测试条件,车辆前平面应放置在PP线上。
车辆声发射应以5km/h至20km/h的模拟速度以5km/h的步长进行测量,每个测试速度的公差为±0.5km/h。
4.3.3 方法(c)-室内设施和行驶中的车辆
车辆应安装在室内测试设施中,车辆可以在底盘测功机上以与室外相同的方式运行。所有麦克风位置应符合图2a中规定的车辆测试条件,车辆前平面应放置在PP线上。
车辆声音发射应在5km/h至20km/h的目标速度下以5km/h的步长测量,对于10km/h或以下的速度,容差为±2km/h,对于任何其他速度,容差为±1km/h。5km/h的速度是最低目标速度。如果车辆无法在给定精度内以该速度运行,则应使用低于10km/h的最低可能速度。
4.3.4 方法(e)-室内设施无车辆
AVAS应通过制造商指定的设备牢固地安装在室内设施中。测量仪器的麦克风应放置在与AVAS 1m距离的主观声级最大的方向,并放置在与AVAS声辐射水平大致相同的高度。
应以5km/h至20km/h的模拟速度,以5km/h的步长测量声发射,每个测试速度的公差为±0.5km/h。

4.4 测量读数
4.4.1 试验方法(a)
应以第4.3.1段规定的每种速度进行至少四次测量。每个麦克风位置的AA至BB之间的车辆每次通过时,应记录发出的声音。从每个测量样本中,应切出从AA到PP前-1米的一段,以供进一步分析。
4.4.2 试验方法(b)、(c)、(d)和(e)
应以上述相关段落中规定的每个速度测量发出的声音至少5秒。
4.5 信号处理
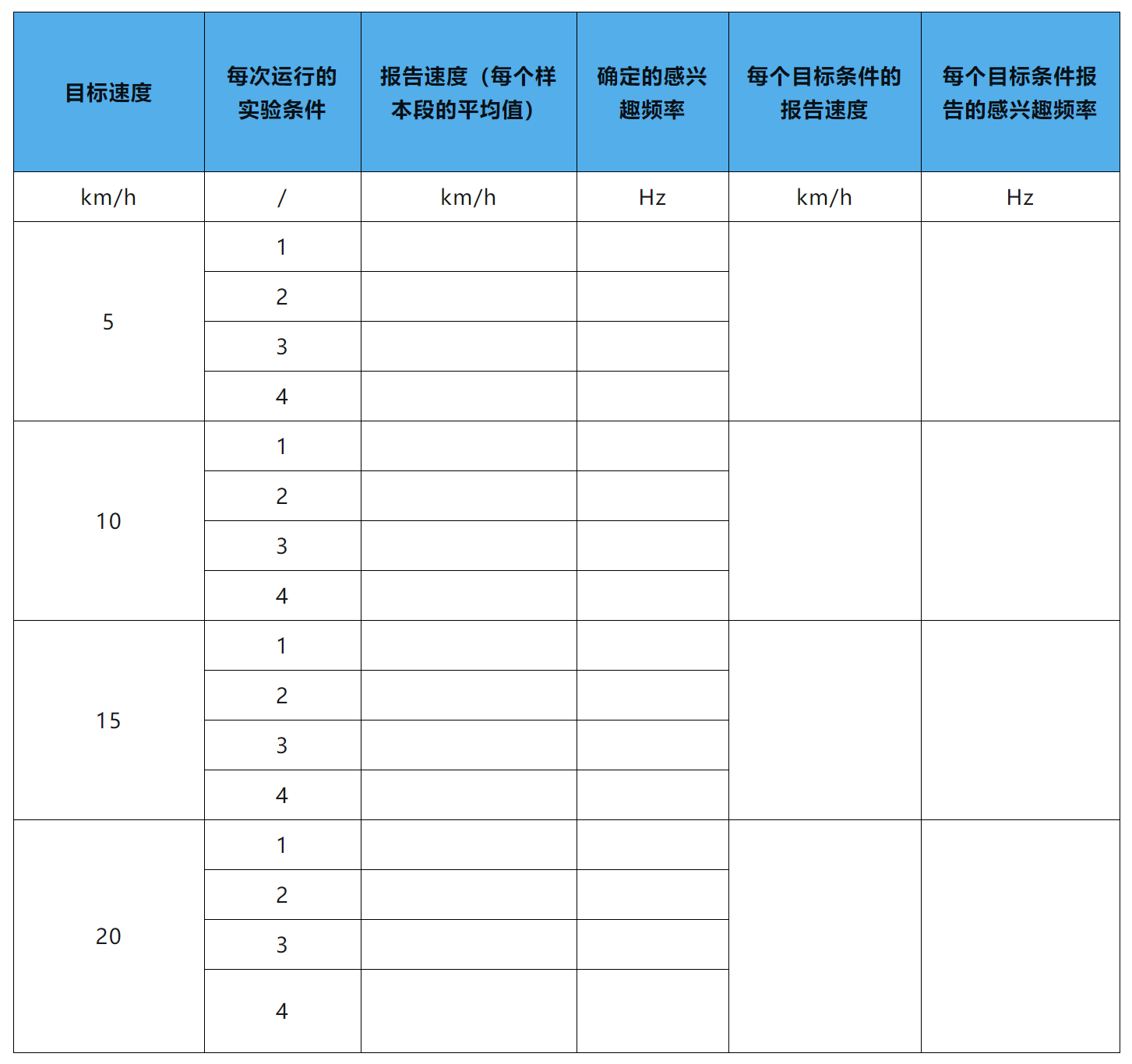
对于每个记录的样本,应使用海宁窗和至少66.6%的重叠平均值确定平均自动功率谱。频率分辨率应选择足够窄,以允许每个目标条件的频移分离。每个样本段报告的速度是样本段时间内的平均车速,四舍五入到小数点后第一位。
汉明窗(hamming)和海宁窗(hanning):汉明窗的时域。波形两端不能到零,而海宁窗时域信号两端是零。从频域响应来看汉明窗能够减少很近的旁瓣泄露,但是稍远一点的旁瓣泄露比海宁窗严重。如果不知道用什么窗,海宁窗是不错的选择。
在测试方法(a)的情况下,应确定每个样品段随速度变化的频率。每个目标条件速度的报告频率应为每个测量样品确定的频率的数学平均值,并四舍五入到最接近的整数。每个目标条件的报告速度应为四个样品段的数学平均值。
每侧目标条件的移位频率分析
对于所有其他测试方法,导出的频谱应直接用于进一步计算。
4.5.1 实验数据汇编和试验报告
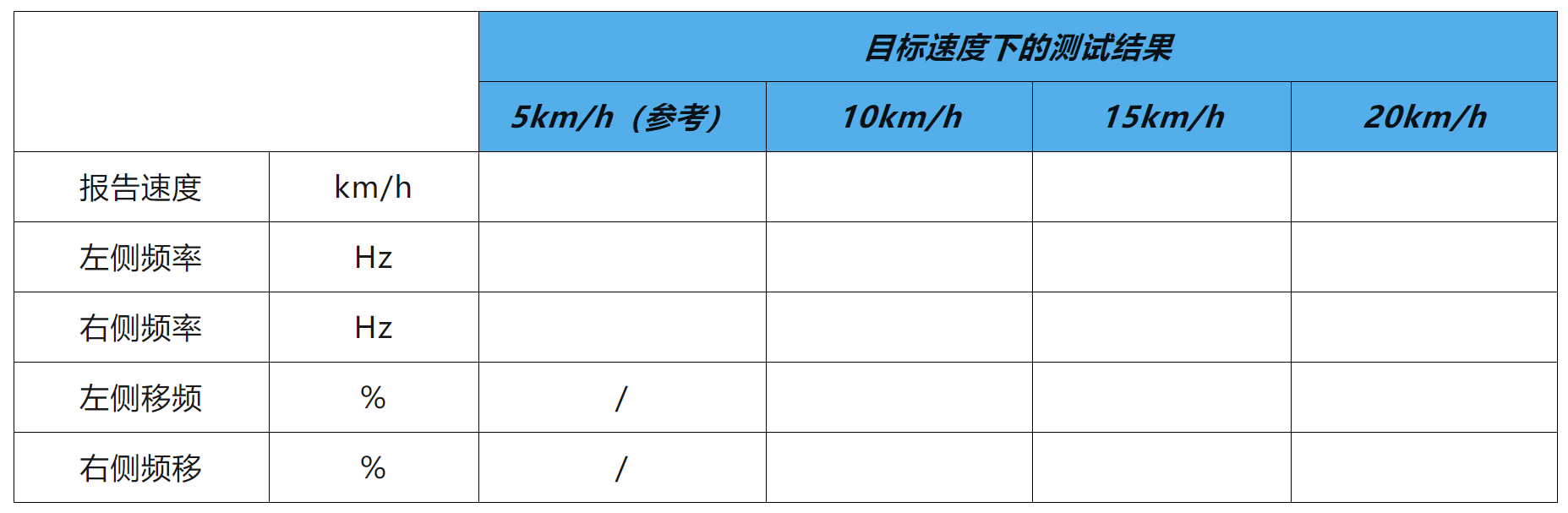
进一步计算应使用拟移位的频率。取最接近整数四舍五入的最低报告测试速度的频率作为参考频率fref。
对于其他车辆速度,相应的频率偏移速度应从频谱分析中取整为最接近的整数。根据下述公式计算信号的频率偏移del f:
del f= {[(fspeed - fref)/(vtest - vref)]/fref}·100
fspeed:在给定速度值下的频率;
fref:参考速度5km/h或最低报告速度的频率;
vtest:车辆速度,实际或模拟,对应于频率fspeed;
vref:车速,实际或模拟,对应于频率fref;
完成每个分析频率后,结果应使用以下表格报告:



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
