




 广告
广告





















































各国法规中的AEB误触发要求

1.AEB误触发的原因
2.AEB误触发的典型场景&解决措施
3.各国法规对AEB误触发的要求
1.AEB误触发的原因
AEB系统的误触发到底是什么原因导致的呢?

AEB(自动紧急制动)系统误触发的原因可以归结为多个方面,这些原因主要涉及传感器技术、目标识别算法、系统控制逻辑以及外部环境因素等。以下是对AEB误触发原因的详细分析:
1.1 传感器技术限制
精度与稳定性:传感器(如毫米波雷达、激光雷达、摄像头等)的精度和稳定性直接影响AEB系统的性能。传感器在恶劣天气(如雨、雪、雾、霾)或特殊道路条件(如弯道、坡道、隧道、护栏)下可能出现性能下降,导致误识别。
部分车型为了降低成本,可能采用单传感器配置(如单雷达),这在一定程度上限制了系统的识别能力。
多传感器融合问题:如果AEB系统采用多传感器融合技术,不同传感器之间的数据同步(如时间同步、传感器固有输出频差等)和融合算法可能存在误差,导致系统误判。
1.2 目标识别算法缺陷
算法复杂度:目标识别算法需要处理大量的图像或雷达数据,并在复杂环境中准确识别出前方车辆、行人、货车跌落物体、动物等障碍物。算法的复杂性和计算量可能导致识别速度变慢或识别错误。如果目标识别算法在特定场景下性能不佳或设计不合理,就容易导致误触发。
误判与漏判:算法在处理复杂场景(如多车道、交叉口)时可能难以准确判断前方车辆的行为,从而引发误触发。算法在特定场景下可能无法准确区分前方障碍物和背景,导致误判(如将静止物体误判为移动物体,错位地赋予其横向速度)或漏判(如鬼探头,未能及时识别出前方突然出现的行人)。

1.3 系统控制逻辑问题
触发条件设置:AEB系统的触发条件设置过于敏感或过于迟钝都可能导致误触发。如果触发条件设置得过于敏感,系统可能会在轻微危险或无需制动的情况下启动制动;如果设置得过于迟钝,则可能无法及时响应真正的危险情况。
制动策略不合理:系统在不同情况下的制动策略可能不够灵活或合理,导致误触发。例如,在低速行驶时,系统可能因轻微颠簸或路面不平而误判为前方有障碍物并启动制动。
车企为了降低误触发率,可能将AEB触发参数设置得非常严格,但这也可能导致在真正需要制动时系统未能及时响应(即漏触发)。
数据处理不当:AEBS系统在处理传感器数据时可能存在延迟或误差,导致误判。

1.4 外部环境因素
道路条件:道路条件如路面湿滑、坑洼、弯道、桁架桥、窨井盖、钢板等可能影响传感器的性能和识别精度,导致误识别、误触发。
天气条件:恶劣的天气条件如雨雪、雾霾、光照变化等可能降低传感器的可见度和识别能力,增加误触发的风险。
目标形状与距离:环境目标的形状、与本车距离、反射点的多少等都会影响传感器的识别准确性。例如,在弯道行驶时,传感器可能将路边的静止车辆或电线杆误识别为前方车辆。
其他车辆与行人行为:其他车辆和行人的异常行为(如突然变道、闯红灯等)也可能导致AEB系统误判并启动制动。

2.AEB误触发的典型场景&解决措施
AEBS(自动紧急制动系统)误触发场景多种多样,这些场景通常涉及到复杂或特殊的环境条件,导致系统错误地判断了潜在的危险并采取了不必要的制动措施。以下是一些典型的AEB误触发场景:
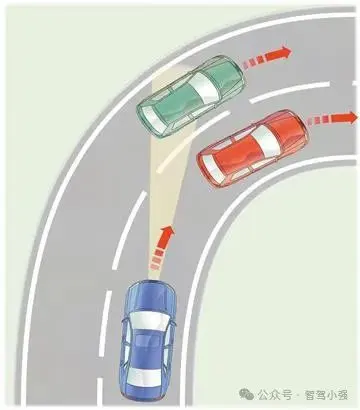
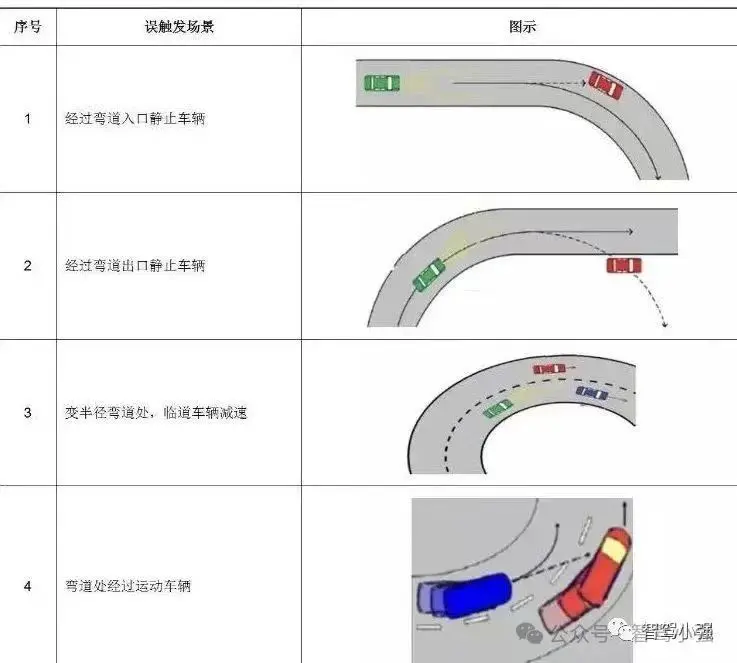
2.1 弯道行驶
在弯道、环岛行驶时,由于车辆的行驶轨迹和前方视线的变化,AEB系统可能会误判前方无危险的弯道内侧物体或路边的障碍物,从而触发紧急制动。这种情况在山区道路、高速公路弯道等场景中尤为常见。
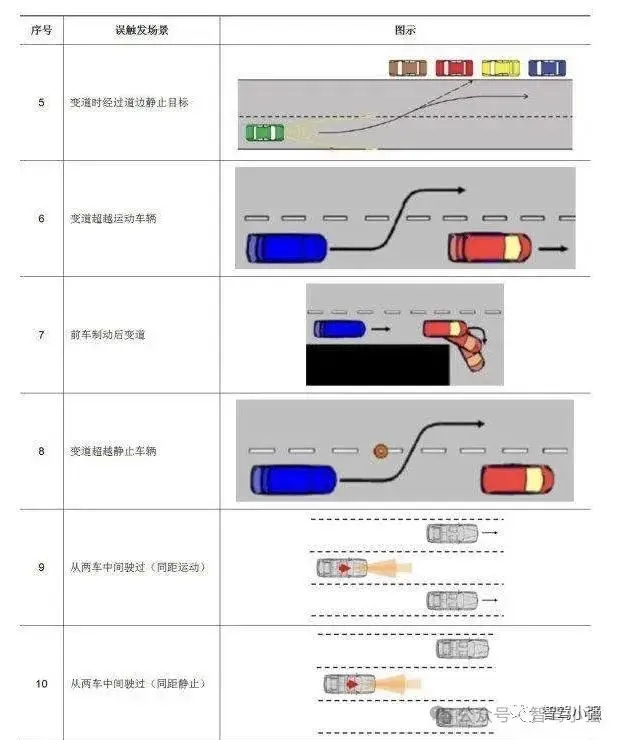
2.2 直线行驶
即使在直线行驶中,AEB系统也可能因为各种原因误触发。例如,前方车辆突然变道或后方车辆超车时,如果AEB系统的传感器未能准确识别这些动态变化,就可能会误判为碰撞风险并触发制动。
前车减速后变道:在前车减速过程中,因为对前车的减速度判断不准,会导致TTC跳变,突然减小,导致误报警或误制动。
2.3 特殊交通环境
除了弯道和直道行驶外,AEB系统还容易在以下特殊交通环境中误触发:
车库:由于车库内光线较暗、空间有限且存在大量静止物体和动态车辆,AEB系统可能误判为碰撞风险。
减速带:车辆通过减速带时,由于车身的震动和颠簸,AEB系统的传感器可能受到干扰并误触发制动。
桁架桥:在通过桁架桥等结构复杂的道路时,AEB系统可能将桥梁结构误判为障碍物。
2.4 其他常见场景
交通信号灯:在交通信号灯前等待时,如果前方车辆突然启动或后车跟车过近,AEB系统可能误判为碰撞风险。
洒水车水柱或水花:当洒水车作业时,其喷出的水柱或水花可能被AEB系统误判为障碍物。
路面铁柱或空中钢管:这些静止的物体在特定角度和光线下可能被AEB系统误识别为障碍物。
漂浮塑料袋或滚动易拉罐:这些轻质物体在风力作用下可能移动并触发AEB系统。
高速公路收费站:在通过收费站时,由于车辆需要减速、停车和缴费等操作,对前车的减速度判断不准,AEB系统可能误判为碰撞风险。
窨井盖:在某些情况下,井盖可能因为松动或破损而突出路面,AEB系统可能将其误判为障碍物。

2.5 AEBS误触发应对方案
为了降低AEB误触发的风险,汽车制造商可以采取以下措施:
提升传感器性能:采用更先进的传感器技术(如太赫兹波雷达、高分辨率摄像头等),提高系统对道路环境的感知能力。增加传感器配置(如毫米波雷达、视觉、激光雷达等多传感器融合感知),增强对目标的探测能力。
优化目标识别算法:对目标识别算法进行持续优化,考虑更多复杂场景和特殊情况,提高算法在各种道路条件下的稳定性和可靠性。
引入深度学习等先进技术,提高算法的识别精度和鲁棒性。

完善系统控制逻辑:合理设置AEB触发条件,系统能够根据驾驶员驾驶习惯自动调节灵敏度,避免过于严格或宽松的设置导致误触发或漏触发。
引入分级制动机制,根据前方目标的类型和距离采用不同的制动策略,降低误触发的可能性。
加强测试与验证:在车辆研发阶段进行严格的仿真测试、驾驶试验测试和多场景道路测试,确保AEB系统的性能符合行业标准。
定期对已售车型进行OTA升级,以修复已知问题并优化系统性能。

此外,用户在使用AEB系统时也应注意观察路况和车辆状态,避免过度依赖自动驾驶辅助系统而忽视主动安全驾驶的重要性。
3.各国法规对AEB误触发的要求
3.1 联合国R152、R131法规要求
R152/R131中定义了四大误触发场景,分别为:
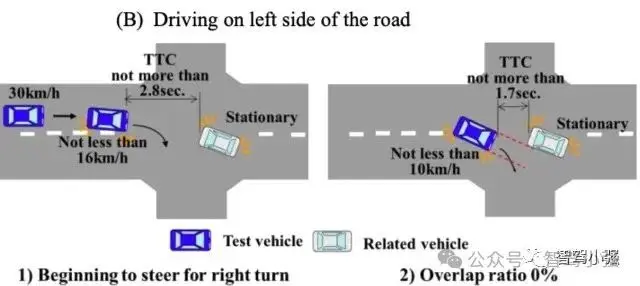
1. 目标车路口静止,被测车辆右侧车道左转,左侧车道右转。
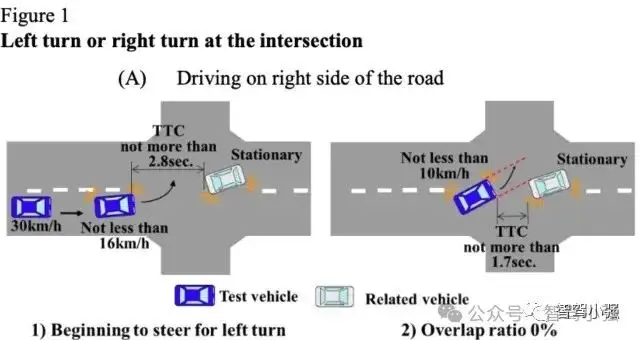
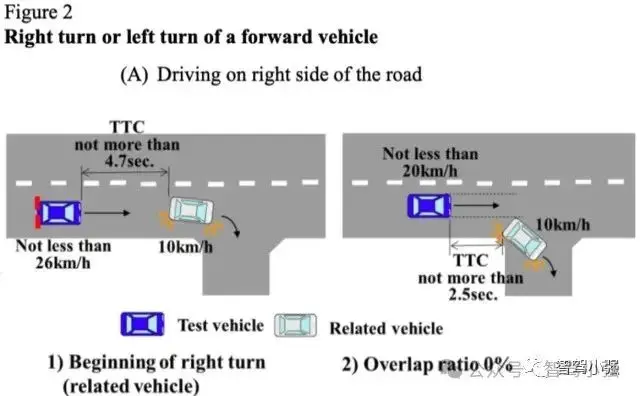
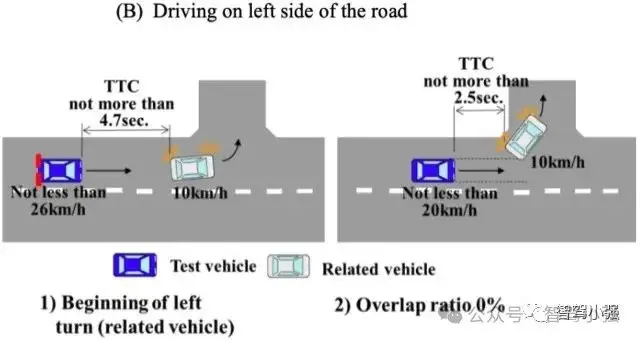
2. 被测车辆直行,目标车路口左转、右转。
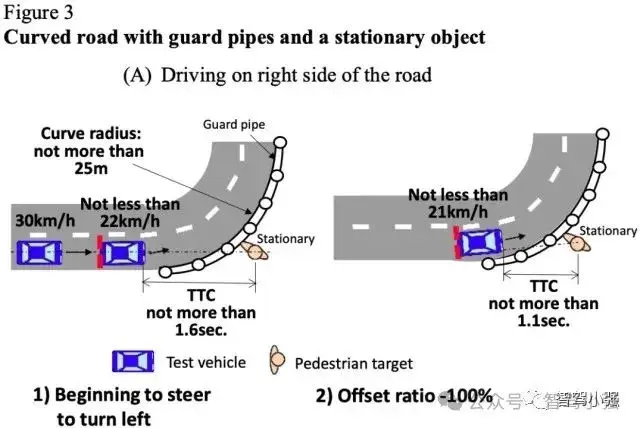
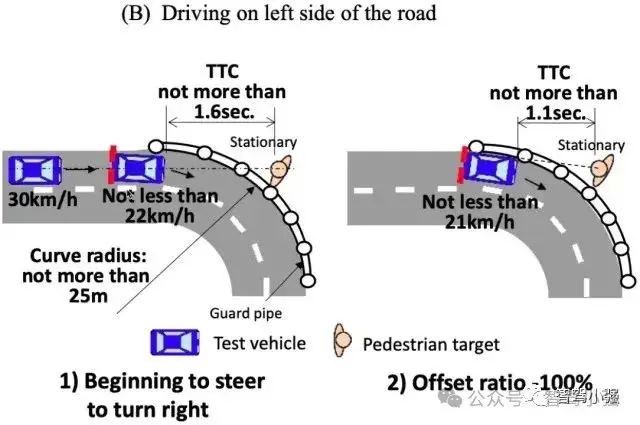
3. 被测车辆左/右转弯通过护栏及护栏外静止行人。
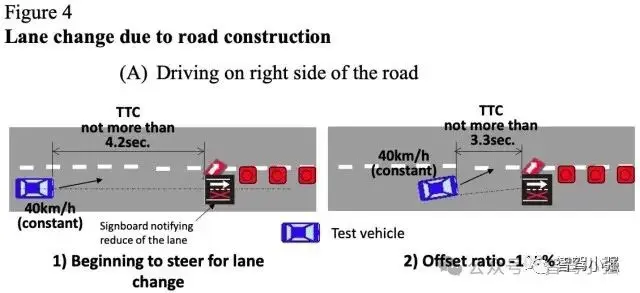
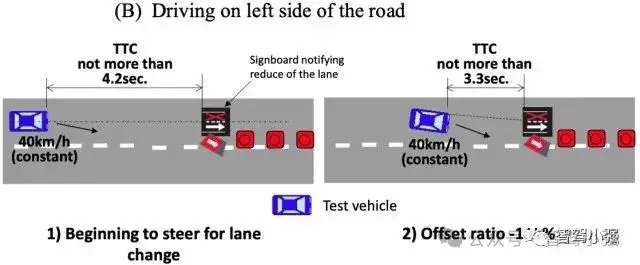
4.被测车辆向左/右换道避开路障。
上述四个场景分别左右各做一次,无误触发(无报警、无制动)则认证通过。
除了需满足上述四个典型误触发场景外,还需尽可能的避免误触发,这需要在开发过程中大量的仿真测试和实际道路测试来证明。
若被终端客户投诉车辆存在设计缺陷导致的误触发,主机厂会面临吊销R152/R131证书,车辆召回整改的处罚。
3.2 美国FMVSS127法规要求
美国轻型车AEBS法规FMVSS127中定义了两个AEBS误触发测试场景,分别是:
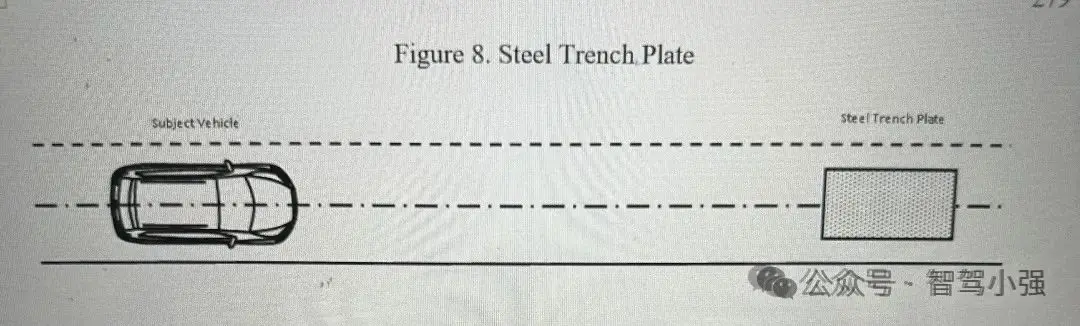
1. 路面钢板测试,试验车以80km/h的车速冲向路面钢板。当测试车辆在越过钢质沟槽板的前缘之前停下来或当试验车辆越过钢质沟槽板的前缘时,试验结束。
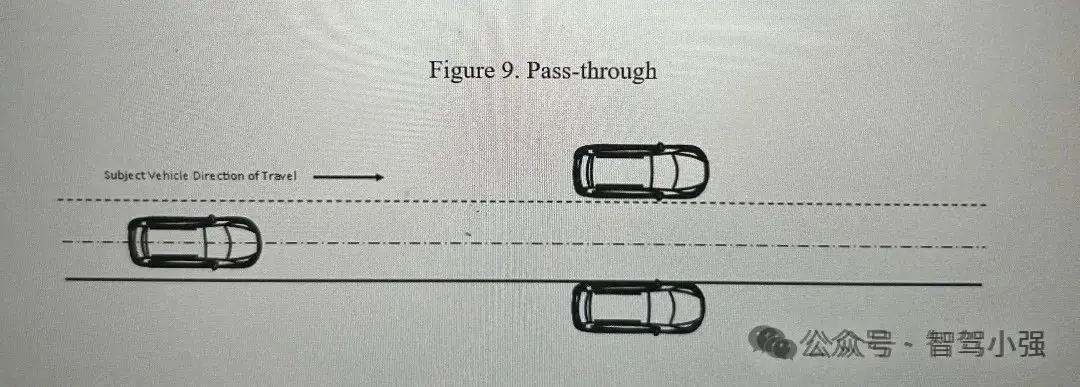
2. 穿行误触发场景,试验车以80km/h的车速穿过两辆并行放置的静止车辆。当测试车辆在其最后一点通过连接车辆测试装置最前面点的垂直平面之前停止时,或当测试车辆的最后一点通过连接车辆测试装置最前面点的垂直平面时,测试结束。
3.3 中国JT/T1242法规要求
中国《营运车辆自动紧急制动系统性能要求和测试规程》JT/T1242-2019中定义了两个AEBS误触发测试场景,要求一次通过,分别是:
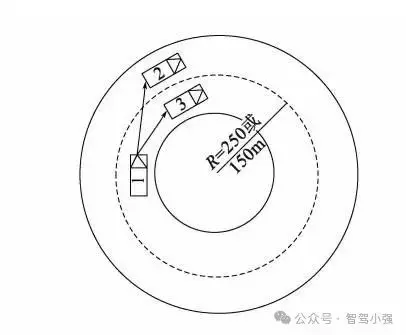
1. 弯道横向目标识别测试:在曲率半径为250m(测试速度不低于50km/h)或150m(测试速度不低于40km/h)的弯道上进行测试,测试要求:自车超过临车道前车的过程中,AEBS不应报警且不执行制动。自车应在与本车道目标车辆发生碰撞前发出预警。
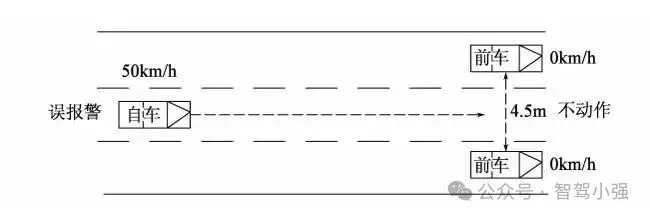
2. 场景二与FMVSS127中的场景二基本一致,自车以50km/h匀速行驶至少60m后穿过两辆静止的前车,驾驶员保持加速踏板位置,保持车速。两辆静止前车的车头方向应与自车一致,车身间距4.5m,车尾在同一平面。

自车不应发出碰撞预警,不应进行紧急制动。
3.4 中国GB/T38186法规要求
中国国标GB/T 38186-2019《商用车辆自动紧急制动系统(AEBS)性能要求及试验方法》中定义了一个误触发测试场景,内容与JT/T 1242中的场景2一致,要求一次通过。
3.5 中国CNCAP-2024测评要求
中国新车测评体系CNCAP-2024中定义了10大AEBS误触发场景。满分3分,通过不少于8个场景可得满分,每组重复开展三次试验,三次试验均要求无报警、无制动,才算通过。
1. 车辆直行经过前方运动行人,自车车速30km/h,行人速度5km/h。

2. 车辆直行经过对向运动的两轮车,自车车速30km/h,两轮车车速10km/h。

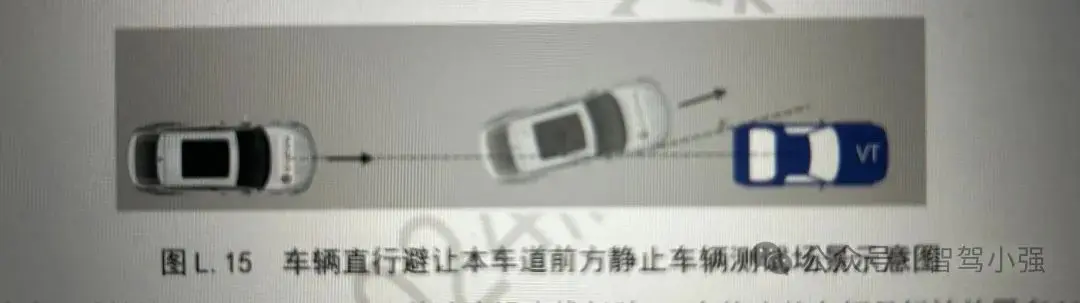
3. 车辆直行避让本车道前方静止车辆,自车车速40km/h,TTC≤4.2s时开始转向,转向完成时(重叠率为0%),TTC≤3.3s。过程中保持车速40km/h不变。
4. 车辆直行经过单侧顺序停放的车辆,自车车速为40km/h,横向距离为0.8-0.5m。

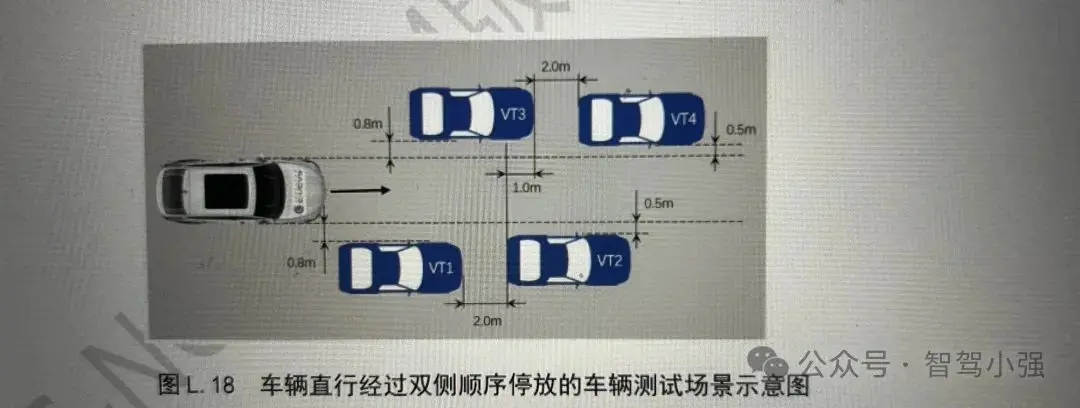
5. 车辆直行经过双侧顺序停放的车辆,自车车速20km/h,横向距离为0.8-0.5m。
6. 车辆转弯经过弯道外侧行人,自车车速为30km/h,弯道半径为30m,参数与R152中的场景3一致。

7. 车辆直行前方行人横穿终止,自车车速为30km/h,车辆右侧放置护栏,行人加速1m、5km/h的速度匀速3m,减速1m,最终停在护栏处。行人停止时,车辆对行人的TTC≤1.4s。

8. 车辆交叉路口左转遇到前方静止车辆,自车车速30km/h,具体参数与R152场景1一致。

9. 车辆直行遇到前方右转车辆,自车车速为40km/h,具体参数与R152场景2一致。

10.车辆弯道行驶超越相邻车道车辆,自车车速为25km/h,弯道外边缘半径为30m,目标车静止摆放在外侧车道中央,自车开启转弯时,对目标车的TTC≤1.9s。




编辑推荐




最新资讯
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
