




 广告
广告





















































关于“车道偏离预警系统(LDWS)”测试

随着社会发展、科技进步,汽车主动安全系统已不再是过去豪华车才有的配置,越来越多的车辆配备上汽车主动安全系统。车辆配置的汽车主动安全系统,也不再局限于防抱死制动系统(ABS)、电子稳定控制系统(ESC)等,开始逐渐向防碰撞预警类、行车辅助类等智能化方向扩展。
一、什么是LDWS
“车道偏离预警系统(Lane Departure Warning System,LDWS)”指的是当汽车发生意外偏离行驶车道发出警报信号给驾驶员的系统。系统主要是由传感器、数据传输总线、行车电脑组成。当车辆在道路行驶时,如果在没有使用转向灯的情况下偏离行驶车道进行压线或越线操作,车外传感器会通过数据总线把该信息上传至ECU。ECU在收到信号后会向驾驶员进行反馈,提醒驾驶员车辆已偏离车道,大大减少了因车道偏离引发的碰撞事故,此外,使用LDWS还能纠正驾驶员不打转向灯的习惯。车道偏离预警系统只能单纯地起到提示作用,而并不能主动介入转向来修正行驶路线。下面,我们将以UN R130《关于车道偏离预警系统(LDWS)的统一规定》法规为例,开展相关故障检测、车道偏离测试。该法规适用于M2,N2,M3和N3类具备LDWS功能的车辆。
二、UN R130对于LDWS的技术规定
1、不会因外部电磁场的干扰而对系统性能产生不利影响。这一点需满足UN R10.03的要求;
2、在时速60km/h以上时,LDWS应正常激活;在发生意外偏离出直道边线或越过半径大于250m弯道边线时,能发出恒定的警报信号;当司机有意偏离车道时,应能抑制信号;
3、如果LDWS被关闭后,车辆重新点火自检时,能自动恢复正常功能;
4、信号指示方面需要有视觉、触觉、听觉中的两种或以上的警报方式,或能在视觉上指示出车道偏离的方向;视觉警报信号应为黄色警报信号;遇到故障,应能正确地指示故障;
5、应能在LDWS每次车辆点火时,检查自身是否有故障,能否正常使用;
6、车道偏离视觉报警信号、系统故障信号,驾驶员在驾驶位上需要能很轻松进行识别,在白天情况下也能清晰可见。
三、UN R130对于LDWS的测试要求
1、对配备有可调警报阈值的车辆,在测试过程中,应将LDWS阈值调节至最大警报阈值,并且在测试过程中不可修改;
2、视觉警报信号检查,该报警信号必须符合LDWS技术规定中对于报警信号的要求;
3、进行车道偏离测试时,测试车辆以65±3km/h的速度行驶,保持稳定速度,然后以0.1~0.8m/s的偏离速度向左或向右偏离车道,要求LDWS在超出车道线外侧0.3m前发出警报信号。测试中,每个偏离方向需要在不同的偏离速度下进行测试;
4、进行故障检测测试时,需要模拟LDWS的电气故障和功能故障,要求LDWS能正确地发出故障警报信号,且在下次点火自检时,故障警报信号应保留;
5、在对配备LDWS停用功能的车辆进行激活测试时,要求在按下停用按钮后,LDWS功能停止,且在下次点火自检时,LDWS能自动恢复功能。
四、车道偏离预警系统测试
在实际场地测试中,我们使用RT惯导系统、ABD驾驶机器人、DEWETRON(德维创)数字采集系统对测试车辆的LDWS进行测试及数据采集。
RT惯导系统集成了GNSS、IMU数据记录、实时处理功能,通过CAN信号与其他测试设备进行通信。ABD驾驶机器人结合RT惯导系统能实现测试车辆的轨迹、车速、位置的精确控制。DEWETRON(德维创)数字采集系统将RT惯导系统数据、ABD驾驶机器人数据以及车辆内、外、仪表等图像信息进行综合采集,做到测试数据全程记录。
(一)车道偏离测试

▲图1 测试设备
1、测试环境条件要求:
(1)测试应在平坦、干燥的沥青或混凝土表面上进行;
(2)环境温度应在0℃~45℃之间;
(3)测试应在良好能见度条件下进行,以确保在要求的测试速度下安全驾驶;
(4)测试道路车道线标记应清晰可见。
2、测试准备工作:
对RT惯导系统和ABD驾驶机器人所需的车辆参数进行设置,并进行设备初始化操作,然后进行测试场景式设置,将车辆一侧前后轮对齐测试道路的车道标线外侧,设置RT惯导系统、ABD驾驶机器人坐标系,确认该点为坐标系“原点”,后续车道偏离测试将在该“原点”的基础上进行。
我们本次以测试车辆速度65km/h,偏离速度0.3m/s为例开展测试。
▲图2 测试准备工作
3、测试过程:
车辆在路径程序引导区外进行启动加速,当到达路径程序引导区时,按下ABD驾驶机器人控制按钮,ABD驾驶机器人接管车辆,对车辆车速、行驶方向进行控制,此时车辆将按照预先设定的路径行驶,全程记录车辆行驶的相关数据。
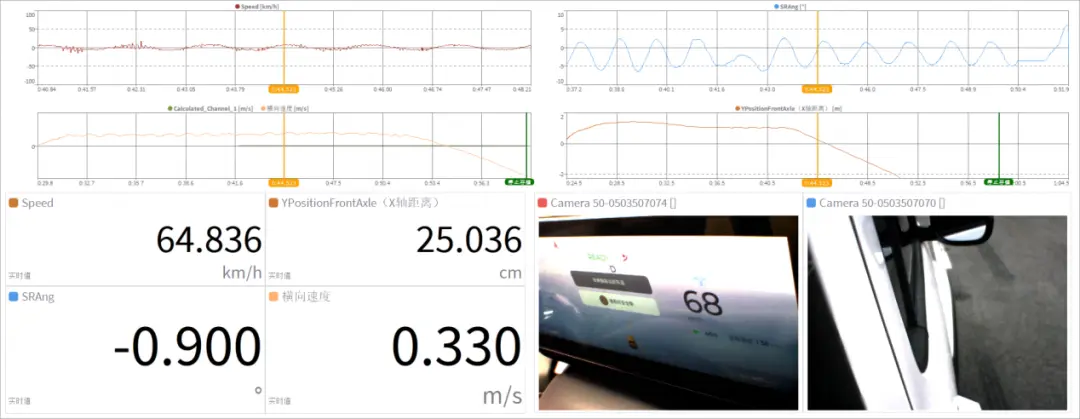
▲图3 数据示意图
测试完毕后,对测试数据进行分析。车辆速度、前轮外缘到车道线外侧距离等数据,被数字采集系统可靠记录,在数据界面上能直观显示。其中,Speed为车辆纵向行驶速度,YPositionFrontAxle为车辆前轮外缘到车道线外侧距离。从数据示意图中可以看出,在车辆在行驶速度64.836km/h、偏离速度0.330m/s的工况下,车辆前轮在距离车道线外缘25.036cm时发出了车道偏离预警信号。
(二)故障检测测试及视觉信号报警检查

▲图4 故障检测测试(遮挡前摄像头)
在进行故障检测测试时,通过使用黑色胶带遮挡车辆前摄像头及两侧摄像头、断开车辆摄像头连接线、断开车辆轮速传感器等方式模拟系统故障,验证车辆是否能正确发出系统故障警告信号。将车辆熄火,再次点火车辆自检时,该信号能保持。
(三)激活测试及视觉信号报警检查
在对配备LDWS停用功能的车辆进行激活测试时,手动将车辆的车道偏离预警系统停用,查看车辆是否能正确发出系统停用信号。将车辆熄火,再次点火启动车辆,查看车辆自检时是否能重新启用LDWS系统。
- 下一篇:理想自动驾驶技术中的双系统是什么?
- 上一篇:车规级 MCU 知识梳理







最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
