




 广告
广告





















































基于文献聚类法的线控转向技术研究进展简析

引言
在科技快速发展、研究工具日益智能、信息对称性愈发增强的今天,如何从海量文献、信息和数据中识别出最具兴趣的主题及文献,找到最关键的核心信息和技术发展脉络,梳理技术框架体系、鉴别最活跃的前景技术方向和趋势,显得尤为重要。信息可视化技术作为前沿技术,不断赋能于技术趋势研究和热点技术探测,可显著提升不同知识背景研究人员的水平和效率,为技术方向探索提供有益的线索。
本文以线控转向为例,探讨了可视化知识图谱在热点技术和趋势识别中的应用实践。全解耦线控转向系统(Steering-By-Wire,SBW)是智能底盘的关键执行系统,在提升整车智能化水平、被动安全性、整车布置灵活性等方面发挥着重要的作用,被行业广泛研究。全解耦线控转向的结构可理解为在R/DP-EPS(齿条式/双小齿轮电动助力转向系统)的基础上取消了管柱与转向器之间的机械连接(中间传动轴),转向操作由电信号传输,机械上实现模块化结构设计,提高了转向系统与底盘其它子系统的解耦性,为整车提供更多的布置自由度,增加碰撞缓冲空间和智能座舱空间。控制上完全实现线控化,可以主动介入转向控制,有利于实现底盘纵横垂集成控制,完成不同模式下的自动驾驶任务需求,提升车辆主动安全性,同时由于可变速比,兼顾人驾模式下车辆低速转向轻便性和高速转向稳定性需求。由于取消了方向盘和车轮之间的机械连接,也对线控转向系统提出系统内以及跨系统冗余设计、多模式容错控制的新需求,保证系统失效时安全、可靠性行驶。目前博世、万都、蒂森克虏伯、捷太格特、采埃孚、舍弗勒等头部供应商已完成乘用车全解耦线控转向产品开发和测试,基本具备线控转向的量产能力,国内供应商也处于研发验证阶段,线控转向产品处于量产前夕。本文主要基于部分国内研究文献,总结归纳线控转向目前的研究进展和脉络,为后续技术热点的演变趋势提供参考。
一 文献统计分析
本文通过对知网文献检索关键词“线控转向”,分别对该技术领域的研究热点、发展脉络及关联技术进行分析。从2001年至2024年,国内文献1552篇左右,基本呈现逐年增长,说明技术领域逐渐发展。根据各个年度发表量进行功能函数y=eα*x+b分析,增长指数ɑ代表论文发表率,国内文献增长系数0.46左右。国外1995年之前Web of Science(WOS)数据库内陆续有文章发表,从1995年之后开始逐步增长,技术研究积累早于国内,1995年以后的增长系数0.48左右。按照全球专利数量分析,增长系数3.1左右,根据上述数据表明国内外产业整体发展阶段基本处于同期,重点解决产品工程化过程的问题。
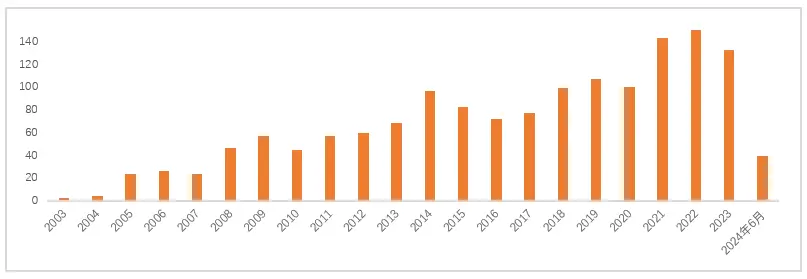
图 1 国内线控转向文献发表量(知网)
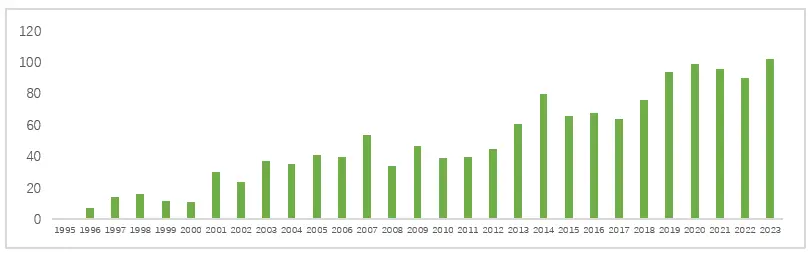
图 2 国外线控转向文献发表量(WOS)
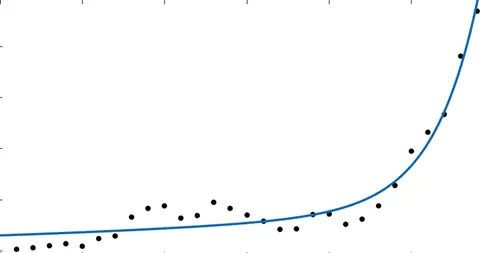
图 3 专利增长系数曲线拟合情况
二 研究热点关键词分析
根据研究领域的关键词共现、共现关系、关键词中心性、聚类及时序脉络情况,可以反映该领域的研究热点、主题结构和演化趋势,提供了直观清晰的分析。
1、关键词共现
线控转向技术为最核心关键词,除了路感模拟、变传动比、传感器、功能安全等核心技术外,同时不断受电动化与智能化深度融合发展下的牵引,呈现出系统先进控制技术、容错技术、轨迹跟踪功能、四轮转向、差动转向、主动转向为主要研究热点。其中除了线控转向本身以外,滑模控制、模糊控制、容错控制、四轮转向中心性较高,且各个节点之间连线较多,研究热点较为密集,驱制动系统、路径规划、仿真等测试验证手段互相交织,不断衍生交叉新的研究内容。
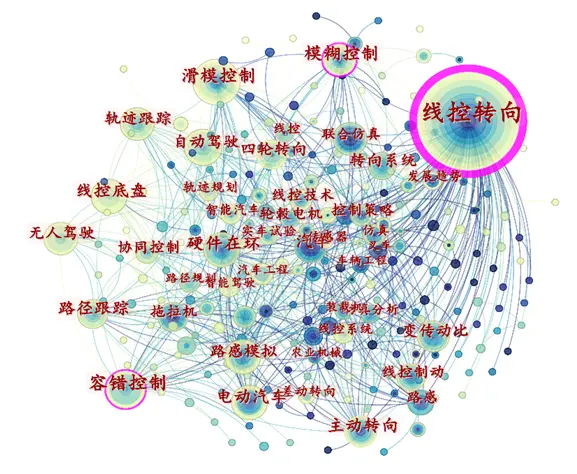
图 4 关键词共现分析(国内文献范围)
以容错控制为例,近几年一直为研究热点,且与协同控制、合作博弈、差动转向、参数估计、故障诊断、μ控制等等关键技术点紧密相关联,互相促进发展。
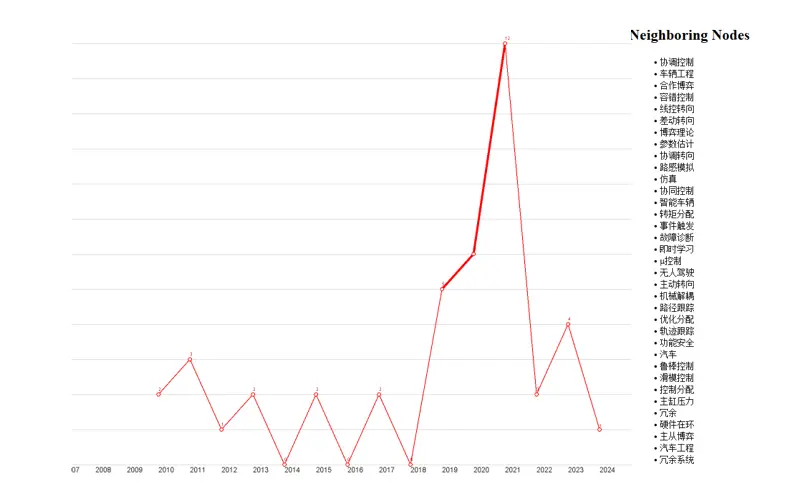
图 5 容错控制主题近期研究热度及临近节点关联
2、主题聚类
根据关键词共现基础进行聚类分析,本文共尝试两种不同聚类偏好,第一种常规聚类,聚类结果主要为:模块Q值0.55大于0.3,聚类平均轮廓S值0.84大于0.5,聚类结构显著。在Cluster #0线控转向中路感、回正力矩、双向控制、人机交互、主动安全等为重要的关键词。排名第一的爆发关键词是Cluster #8中的“线控底盘”,爆发值为11.00,第二位是Cluster #4中的“自动驾驶”,爆发值为7.98,第三位是Cluster #10中的“滑模控制”,爆发值为7.94,第四位是Cluster #4中的“轨迹跟踪”,爆发值为7.29,第六位是Cluster #2中的“容错控制”,爆发值为7.09。第十位是Cluster #4中的“路径跟踪”,爆发值为4.98。无人驾驶、自动驾驶认为可以进行合并。
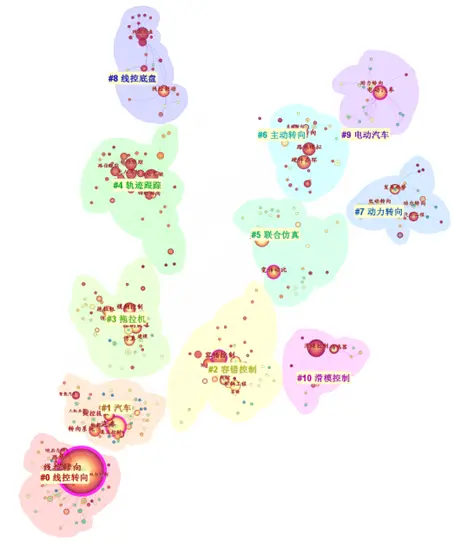
图 6 线控转向研究聚类情况一(国内文献范围)
采用第二组聚类参数设置重新进行分析,聚类结结构显著性仍然健壮,但是聚类类别发生改变,增加了模型预测控制、操纵稳定性、前馈控制、混杂系统、智能网联汽车的类别,原有的部分聚类类别消失。Cluster#0线控转向主要包含:功能安全、直流电机、flexray总线、广义内模控制、 相平面图、稳定性集成控制、二自由度鲁棒控制、主动转向、稳态增益控制、路感模拟、动态校正控制;Cluster#1模型预测控制主要包含:轨迹跟踪、模型预测控制、自动驾驶、 高斯过程回归、自适应控制 、轮胎力分配、个性拟人化驾驶员换道模型、自动换道系统;Cluster#2线控转向系统(可以与簇0合并)主要包含:路感模拟、无模型自适应控制、 回正控制、参数估计、 变传动比设计、双向控制、 位置跟随控制;Cluster#4容错控制主要包含:制动失效、稳定性控制、滑模控制、径向基神经网络、pi观测器、直接横摆力矩控制、主动后轮控制、主动前轮控制、同步转向角控制;Cluster#5操纵稳定性主要包含: 侧向加速度、横摆角速度、变传动比、协调控制、最优控制、车辆稳定性模糊控制、扩展卡尔曼滤波;Cluster #7线控技术(重点交叉领域)主要包含:轮毂电机、线控四轮转向、四轮独立驱动;Cluster#8前馈控制主要包含:前馈控制、回正力矩、主动回正、驾驶员偏好力矩;Cluster#9线控制动(重点交叉领域)主要包含:线控制动、驻车制动、汽车电子控制、线控转向、自动驾驶矿卡、sent通信协议、 伺服电机、智能TAS传感器;Cluster#10主要包含(重点交叉领域):智能网联汽车、线控底盘、一主多从博弈。
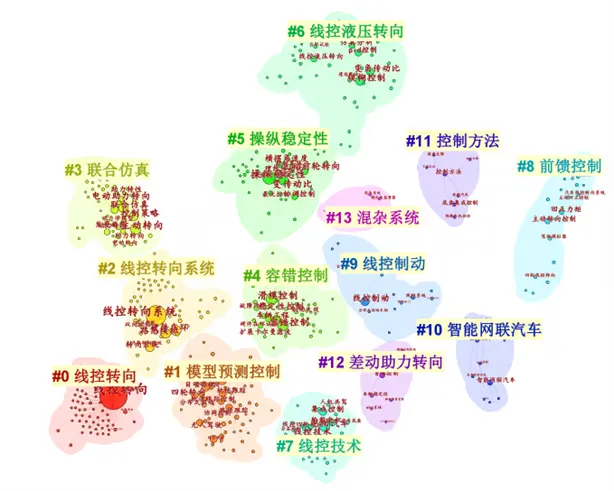
图 7 线控转向研究聚类情况二(国内文献范围)
以新增的混杂系统簇为例,从2006年出现一直都有相关研究,并且与变传动比、横向稳定性控制、协同控制、四轮转向等临近节点相关。因此在进行聚类分析研究时需要根据研究问题特点、颗粒度,对聚类算法参数进行学科、技术、知识特征调整,才能得到更有指导意义的探测。
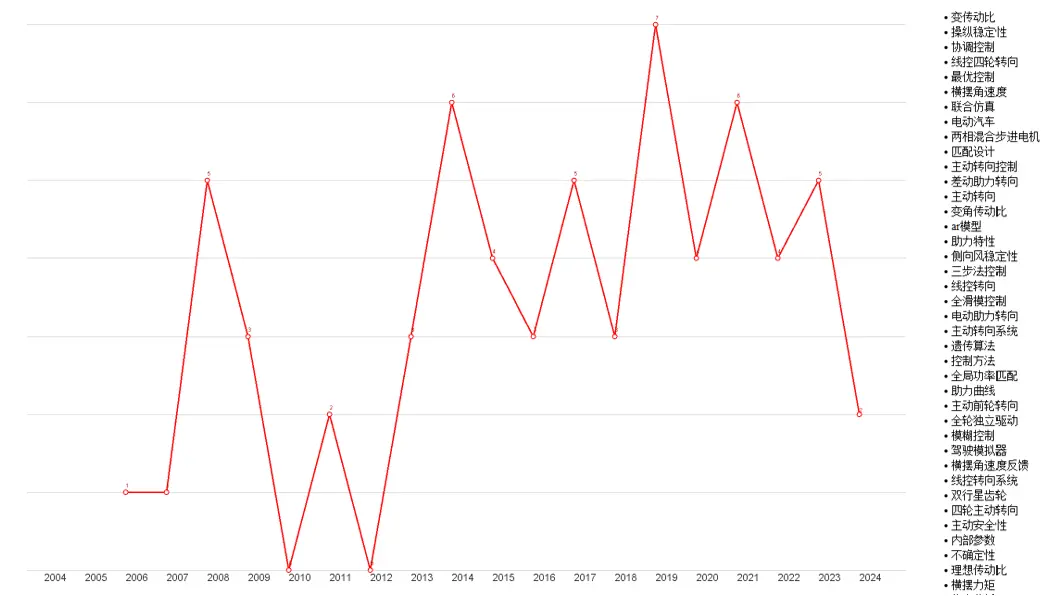
图 8 混杂系统主题论文时间趋势及关联节点
3、研究路径、热点与趋势分析
将线控转向技术研究中涉及的关键词进行时间序列分析如图所示,从而梳理该研究领域内技术发展脉络和过程。横向观察变化趋势,根据聚类结果,2007年左右,伴随无人驾驶技术萌芽,线控转向结合线控制动、集成控制技术被提出,后经历长期低谷期;2010年液压线控转向、容错控制聚类出现;2015年滑膜控制近年来在主动容错、多智能体、主从模式进行技术迁移演化;2018年自动驾驶再次强势发展,人机共驾、功能安全、路径跟踪、轨迹跟踪、混杂系统车道保持技术聚类及突变出现,容错控制发展到主动容错;2020年电动轮、后轮转向聚类出现。纵向了解聚类主题的时序变化,可以看出相关主题的主要活跃时间跨度。
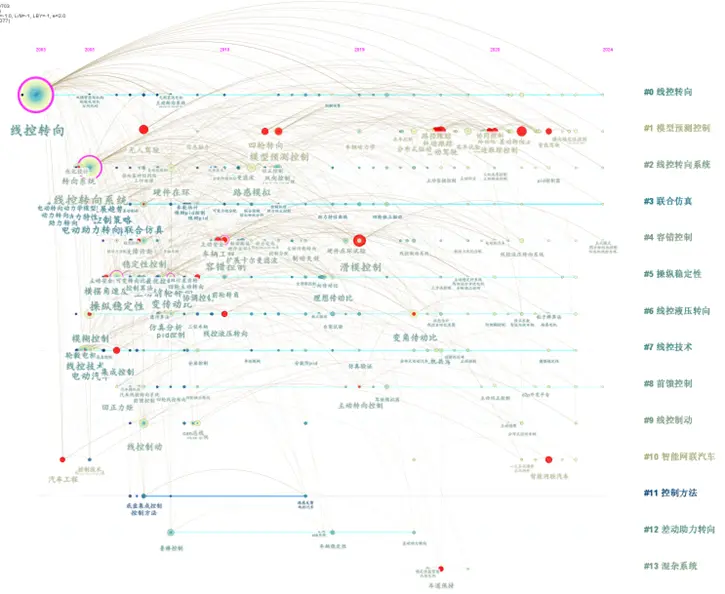
图 9 关键词时序图
研究论文的突现关键词如图示,红色表示在相应年度范围内,该关键词相对有较明显的“突现”变化。由此可以从一定角度反映当时的研究热度变化,知识流动和转移的动态过程,其中智能驾驶、自动驾驶以及无人驾驶可进行合并,由于受到执行自动驾驶任务的需求,线控底盘、轨迹跟踪一直从2020至今有较高出现频率,表明该领域在该时间段内有相对较强的研究热度。

图 10 突变词情况
三 总结
本文基于国内部分文献,运用可视化知识图谱法、成熟度曲线法对线控转向技术脉络进行研究实践。文献聚类分析的结果展示了线控转向技术主题下的研究热点、时序迁移特征和技术突变,其中与自动驾驶运动规划、安全容错、先进控制、全线控底盘等交叉领域备受科研关注。从文献数量、专利数量、技术成熟曲线看,其中所涉及的科学问题及底层机理较少,与产业实际进程互相印证,可以得出全解耦线控转向主要处于产业化前夕,其创新发展更多来自于交叉领域互相带动效应。需要注意的是本次研究过程中,数据采集有限,数据清洗也不够全面,主要反映国内该技术的研究现状及趋势,可结合国际论文数据库做进一步深层次分析,以掌握更全面和精准的线控转向技术相关动态。
运用海量信息聚类、热点词共现和发展脉络的研究分析,可为其他热点技术识别和创新趋势开展适应性研究,也应该注重研究人员对背景知识的理解和跟踪,结合数据库范围、技术发展特征进行具体应用场景的聚类调参。同时,也关注到,以固态电池为代表的化学学科创新基因特色的领域,且技术、产品、产业仍然存在大量科学问题、机理探究工作,此类特征场景采用文献类进行科学脉络发现具有数据基础广泛,适应性较强;而底盘在汽车工业发展过程中是比较成熟的领域,偏重技术和产品测试验证和集成创新,其研究瞭望的方法手段更应该采用专家、质量功能法等展开,结合科技文献、热点技术可重点发现跨学科和领域交叉的创新方向。
作者| 曲婧瑶 ——电动化研究中心产业技术研究部部长



编辑推荐




最新资讯
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
-
天检新能力VOL.95 | 乘员晕车仿生测试能力
2025-04-25 10:14
