




 广告
广告





















































规程解读丨2024版C-ICAP基础行车辅助测评规则解读

2024版C-ICAP于2024年7月起生效,其中基础行车辅助测评规则设置了跟车能力、组合控制能力、紧急避险能力和驾驶员交互4个一级指标。中汽研科技有限公司平台技术总监胡硕认为,该规则综合评价了辅助驾驶功能的安全性、可用性与舒适性,相较于1.1版规程增加了车辆对行人、电动自行车、摩托车等交通参与者识别与响应的考察,同时提升了人机共驾过程中人机交互测试的重要程度,评价维度更为全面、贴近我国道路场景和智能网联汽车发展实际。
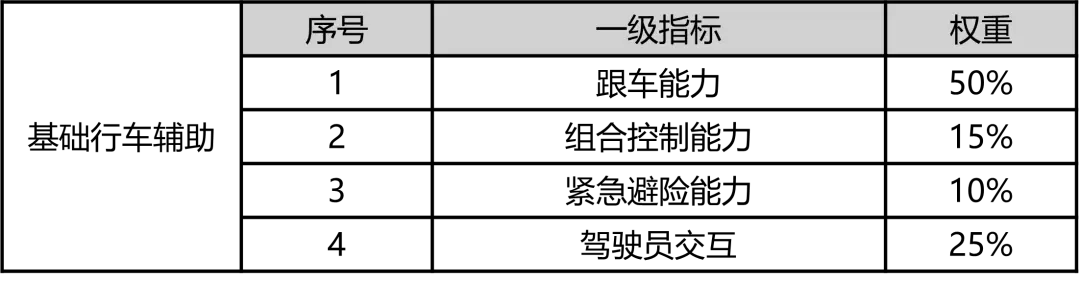
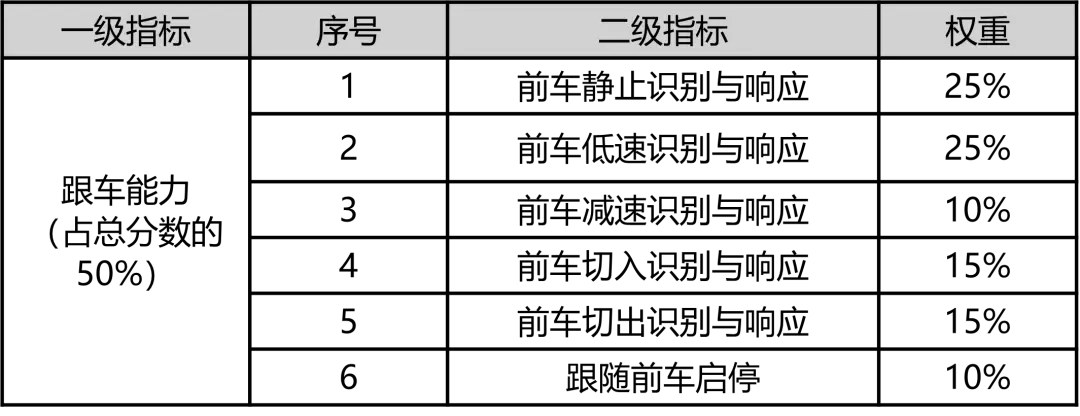
01 跟车能力
跟车能力在基础行车辅助中占比达50%。跟车能力考察目标车辆在前车静止、前车低速行驶、前车减速、前车突然切入、前车切出、跟随前车启停等六种场景的识别能力与响应能力,对智能网联汽车基于感知系统、决策系统、执行系统的主动安全能力进行测试,保障道路安全。各场景下又根据实验车辆速度、目标车辆的速度和位置作出细分,评分细则方面细化了纵向减速度与减速度变化率的评价标准,更为准确地评估驾乘人员舒适性。
1 前车静止识别与响应
前车静止识别与响应测试场景中,测试车辆的速度为60至120km/h,极限速度由80km/h提升至120km/h。前车的摆放位置覆盖了道路中间及左右侧、且测试环境覆盖白天和夜间,对车辆全天候的感知能力提出了较高的要求。
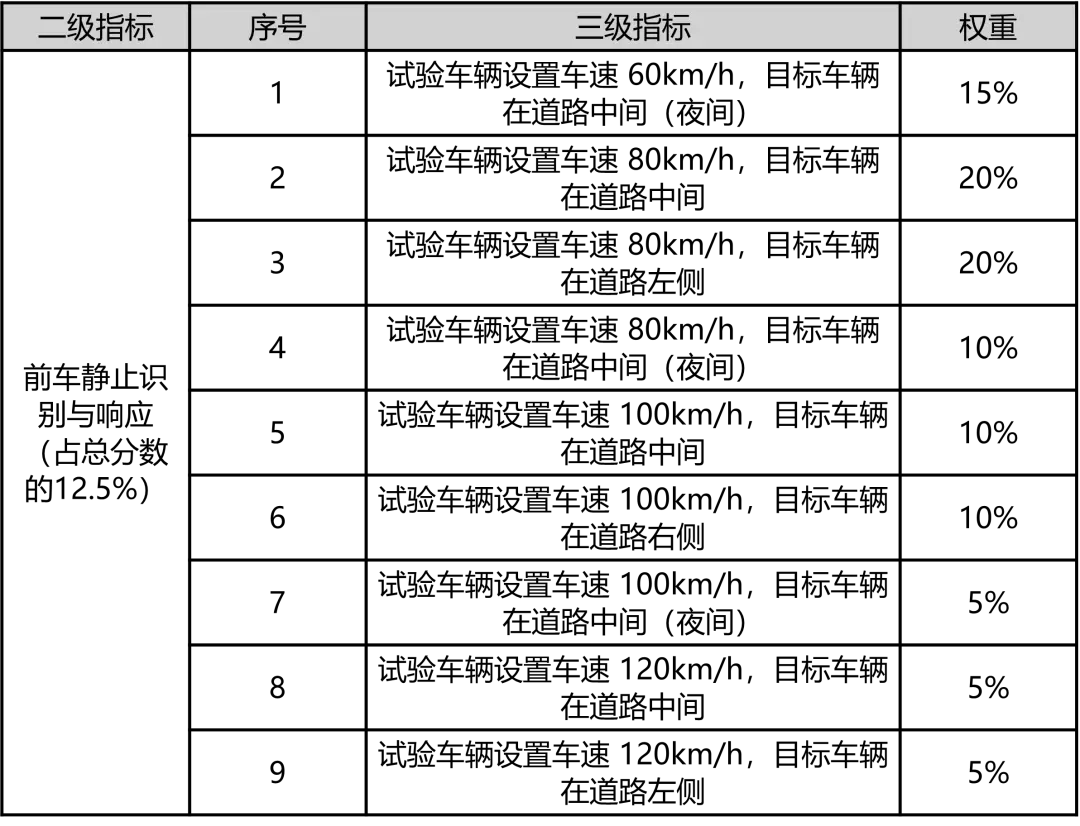

(前车静止识别与响应测试场景)
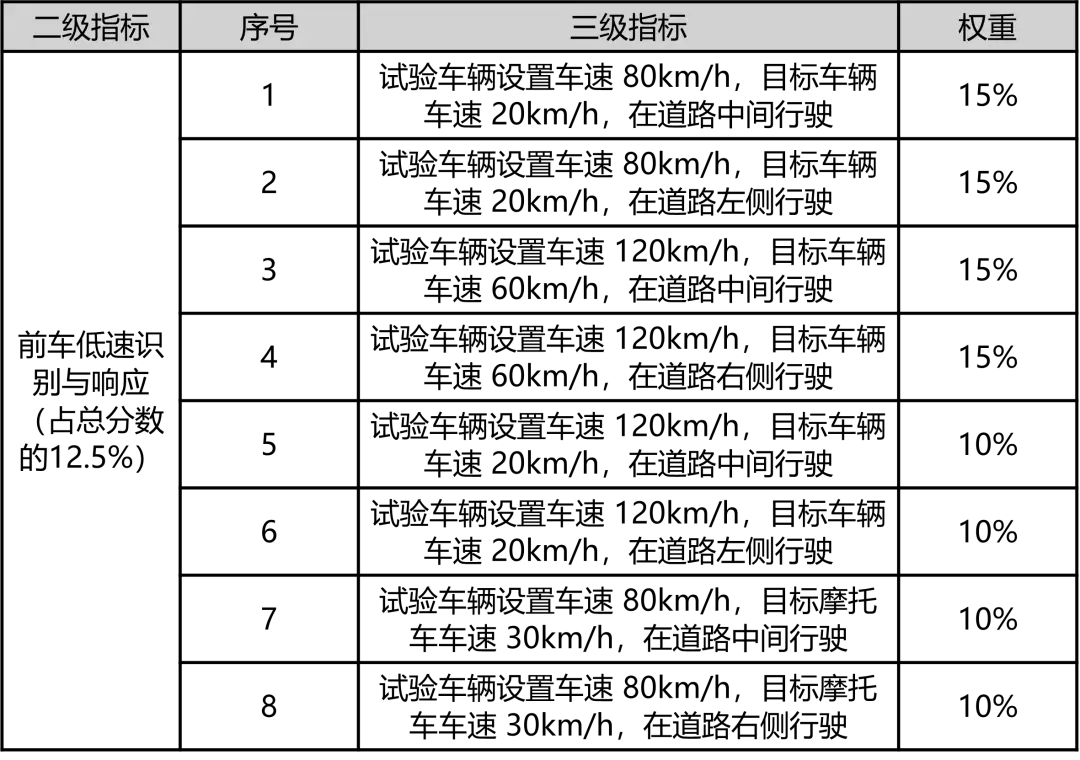
2 前车低速识别与响应
前车静止识别与响应测试场景中,测试车辆的速度为80、120km/h,与目标车辆的速度差最高达100km/h,对测试车辆的减速能力提出了较高的要求。该场景还新增了摩托车作为低速目标物的测试,真实地模拟了我国的城市道路路况。

3 前车减速识别与响应
前车减速识别与响应场景中,扩展了测试车速范围。
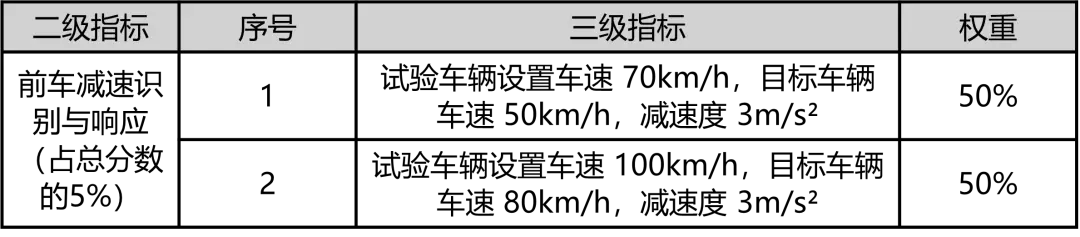
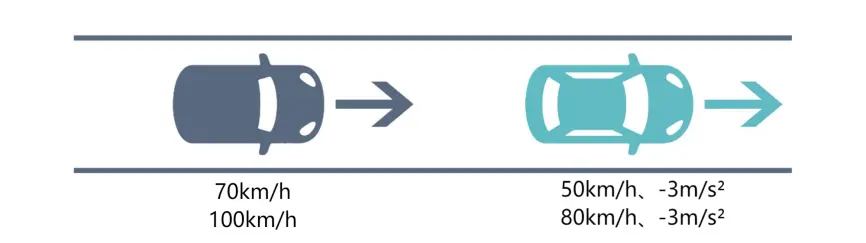
(前车减速识别与响应测试场景)
4 前车切入识别与响应
前车切入识别与响应场景中,新增了摩托车作为目标物切入的场景。
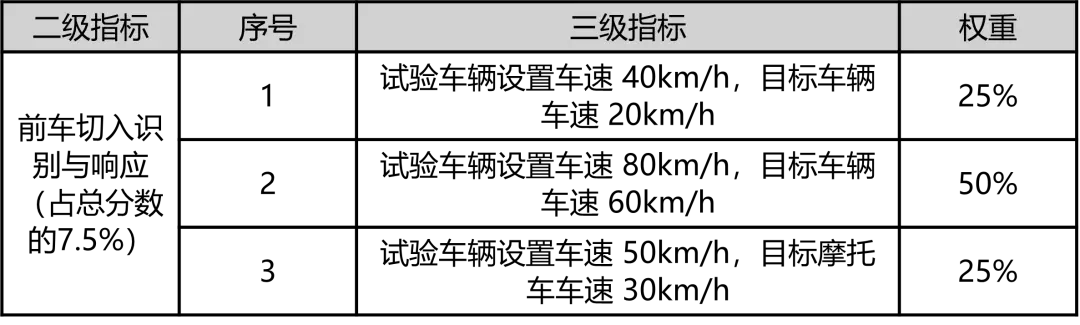


前车切入识别与响应测试场景
5 前车切出识别与响应
前车切出的场景下,目标车辆需在前车变道后识别到静止的第二目标物并进行减速。相较于1.1版规程,2024版规程新增了摩托车、电动自行车作为静止目标物。该测试场景还新增了将可具备C-V2X功能的汽车作为静止的第二目标物的附加项,对V2X功能在交通安全中发挥的作用进行前沿探索。
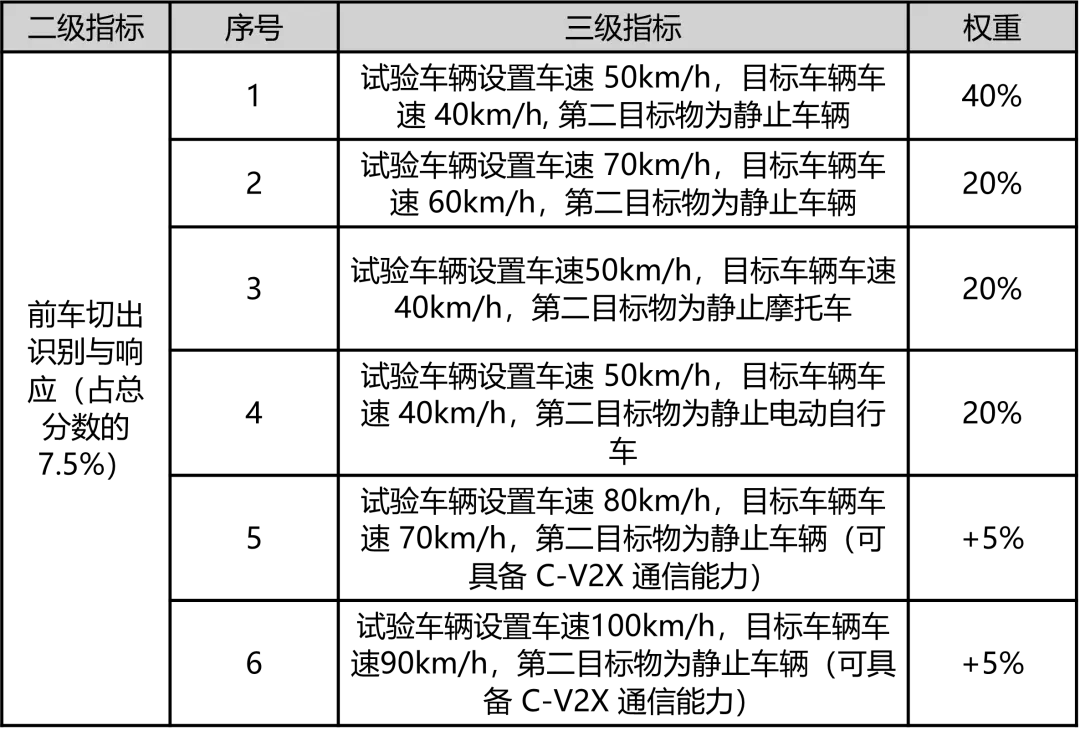
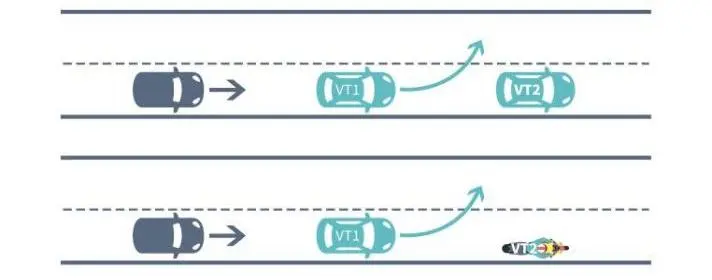
前车切出识别与响应测试场景
6 跟随前车启停
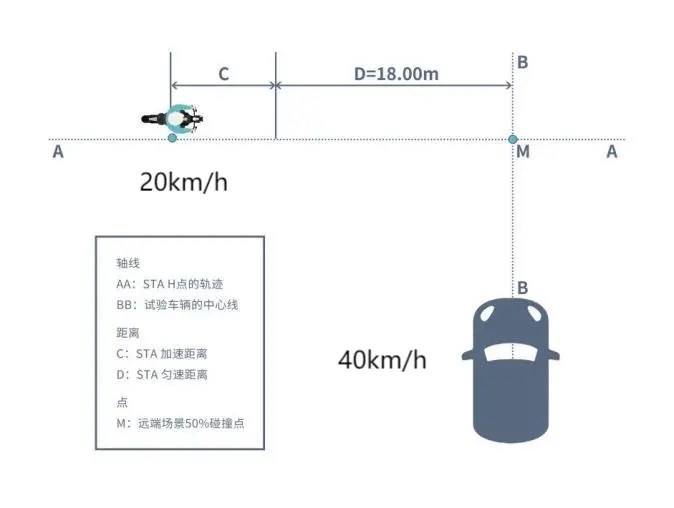
2024版跟随前车启停场景中新增了行人横穿情景,即目标车辆停止后,行人以5km/h的速度横穿至试验车辆中心线处,随即目标车辆起步加速恢复至初始速度,考察测试车辆是否会因为选择跟随前车起步而与行人发生碰撞,对车辆跟随前车的安全策略提出了更高的要求。

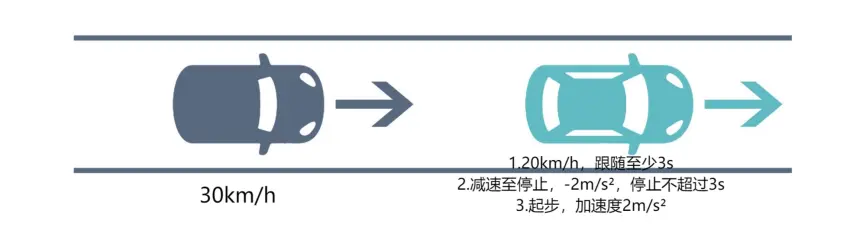
跟随前车启停测试场景—无行人横穿

02 组合控制能力
组合控制能力重点考察车辆在弯道中行驶的控制能力和拨杆换道能力。

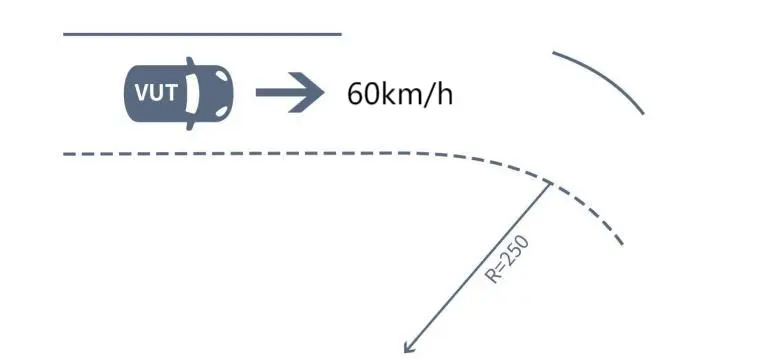
1 弯道通行
弯道通行项目根据是否有其他交通参与者分为两个测试场景组成,均基于长直道和弯道的组合。无其他交通参与者的情形下,测试速度达90km/h、120km/h,重点考察车辆在高速弯道情况下的车道保持能力。有其他交通参与者的场景中,在弯道尽头设置了静止的目标车辆,目标车辆摆放位置较为“刁钻”,容易处于测试车辆在直道上行驶时的识别盲区,是对测试车辆的识别角度、反应与决策时间、减速能力的综合考察。

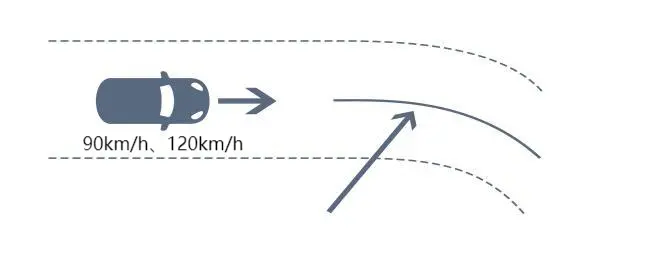
弯道通行-无其他交通参与者测试场景
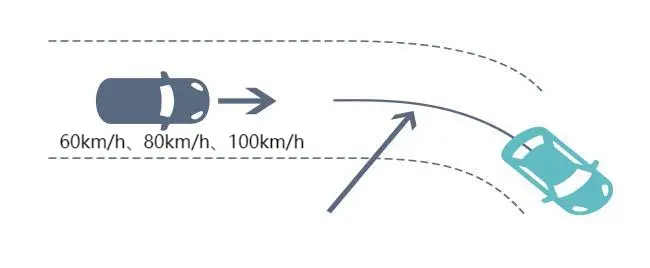
弯道通行-有其他交通参与者测试场景
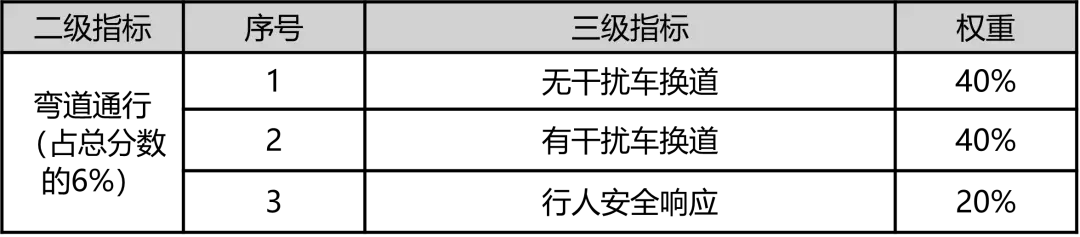
2 拨杆换道
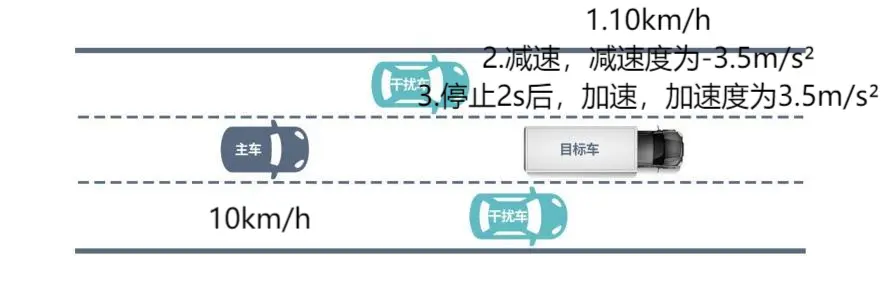
2024版规程中,拨杆换道能力由加分项纳入了正式测试项目,考察车辆在无干扰车、有干扰车、相邻车道有行人三种场景下是否作出正确的决策。无干扰车时,目标车辆需在换道过程触发后3s至5s内完成换道准备,并在越过车道线后的5s内完成换道执行。有干扰车、行人安全响应两个场景主要考察在相邻车道中有快速靠近的车辆或相邻车道前方有行人时测试车辆是否会出于安全取消变道的决策,是对车辆换道功能安全性的重要考察。
无干扰车换道测试场景

有干扰车换道测试场景
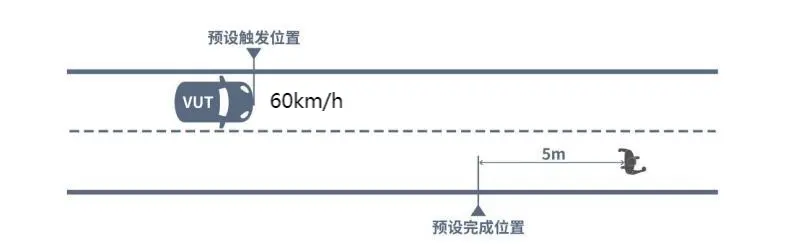
行人安全响应测试场景
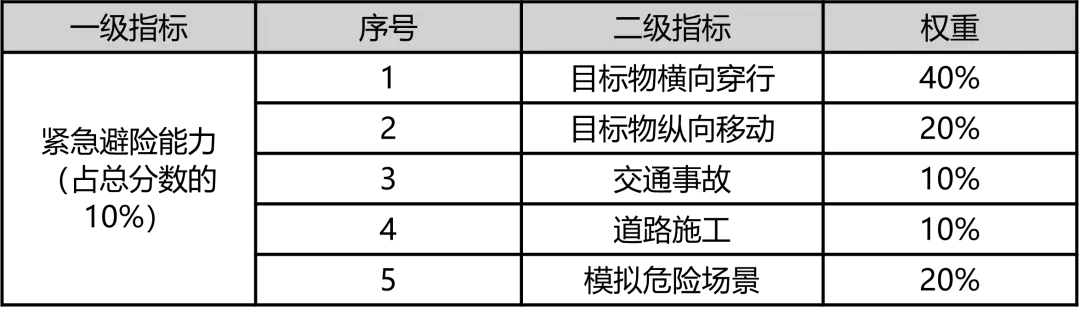
03 紧急避险能力
紧急避险能力着重考察车辆在突发情况下的主动安全能力,共设置了目标物横向穿行、目标物纵向移动、交通事故、道路施工、模拟危险场景五个场景。2024版新增了目标物纵向移动的场景,同时模拟危险场景由附加项调整为必测项,在紧急避险能力中的权重由10%上升至20%,且测试内容更加丰富。
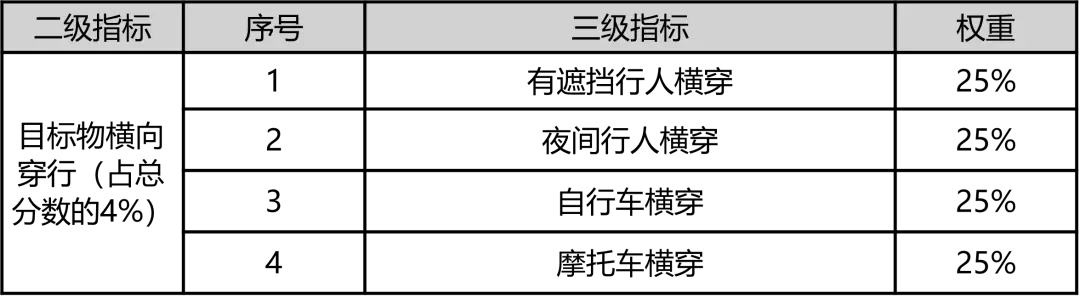
1 目标物横向穿行
在目标物横向穿行方面,共设置了四个场景。一是有遮挡行人横穿,模拟了城市道路中行人横穿道路且路侧有停泊车辆遮挡的典型危险场景。二是夜间行人横穿,该场景下模拟了夜间低光照下行人横穿的典型危险场景。三是二轮车以15km/h的速度横穿。四是电动二轮车以20km/h的速度横穿,模拟电动自行车从路口突然窜出来的危险场景,更为贴近中国交通实际环境。
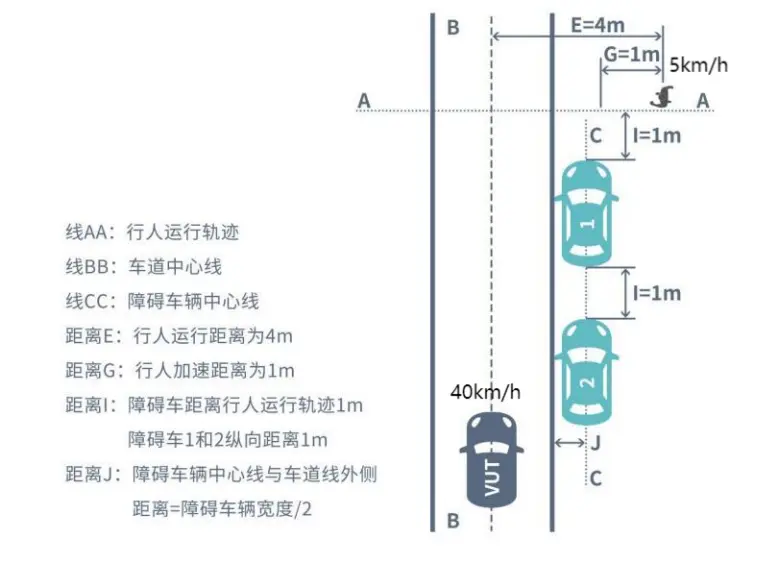
有遮挡行人横穿测试场景
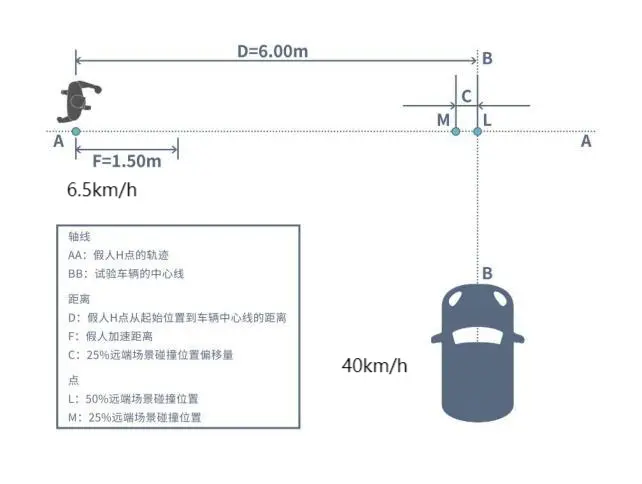
夜间行人横穿测试场景
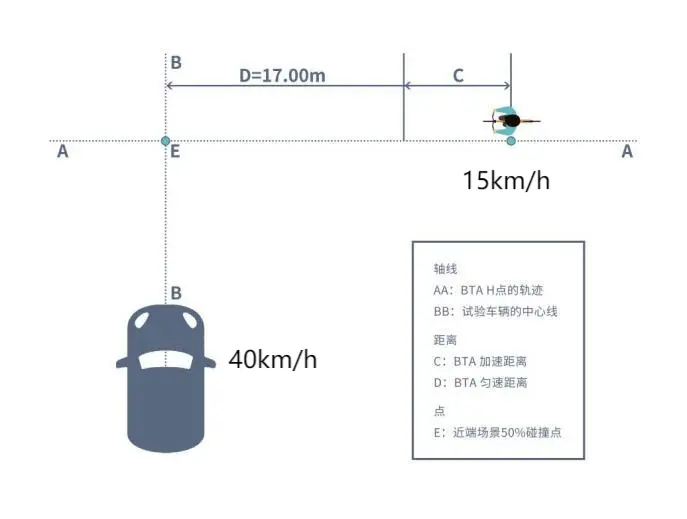
自行车横穿测试场景
摩托车横穿测试场景
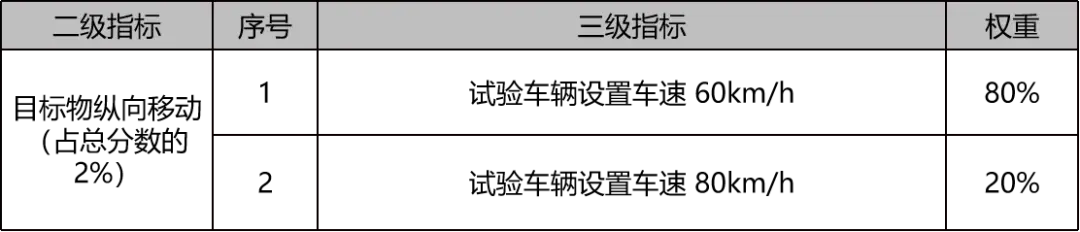
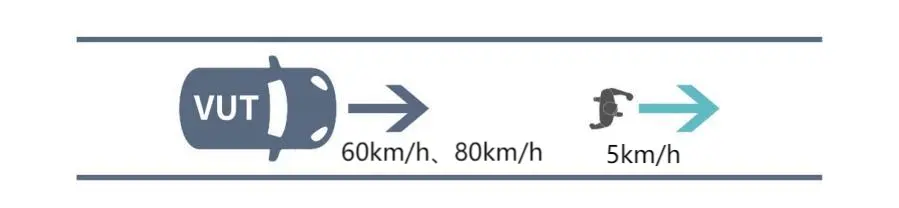
2 目标物纵向移动
目标物纵向移动测试模拟了行人在机动车道行走的危险情况,测试车辆以60km/h、80km/h的速度快速行驶,对车辆行车辅助功能的安全性进行较高难度的测试。
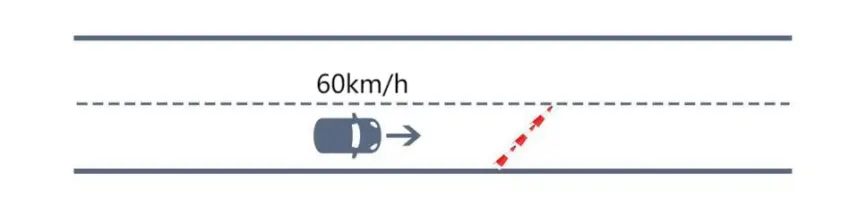
目标物纵向移动测试场景
3 交通事故
交通事故项目设置了一个测试场景,占总分数的1%,模拟了交通事故发生后事故车辆横置于道路的情形,此时测试车辆以60km/h的速度行驶,考察测试车辆对非正常停泊状态的目标车辆的识别与响应能力。

交通事故测试场景
4 道路施工
道路施工项目占总分数的1%,设置了一个测试场景。模拟了道路摆放锥形交通路标的情形,考察车辆对锥桶等异形目标物的识别与响应能力。
道路施工测试场景
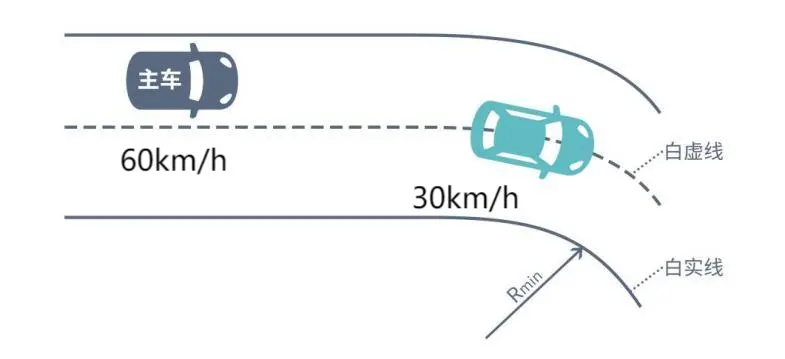
5 模拟危险场景
模拟危险场景由附加项转为正式测试项目。流程合规性审核主要考察实际的测试环境是否满足仿真的基本要求,认定是否能够实现仿真场景的构建以及整体的闭环测试。此外还设置了高速前车紧急避障、低速重卡走走停停、隧道入口前车紧急避障、弯道前车并线行驶等仿真场景。
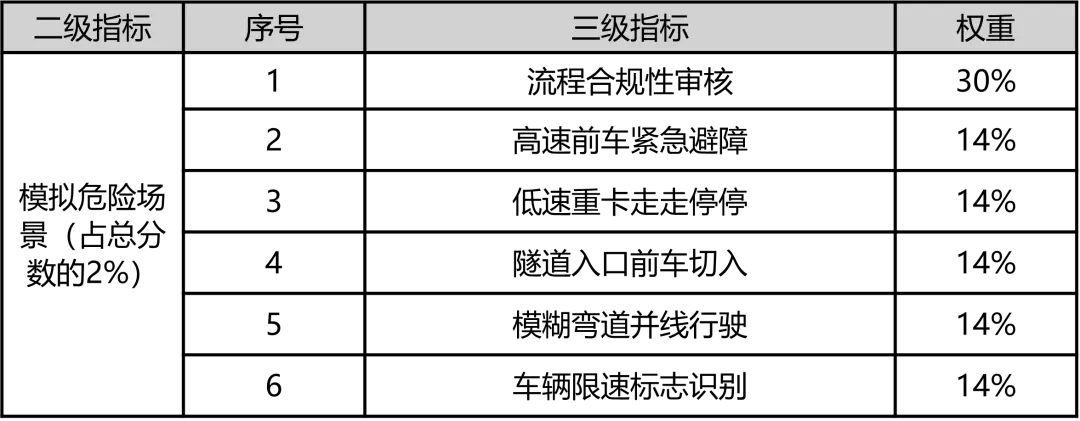
高速前车紧急避障场景(仿真)
低速重卡走走停停场景(仿真)
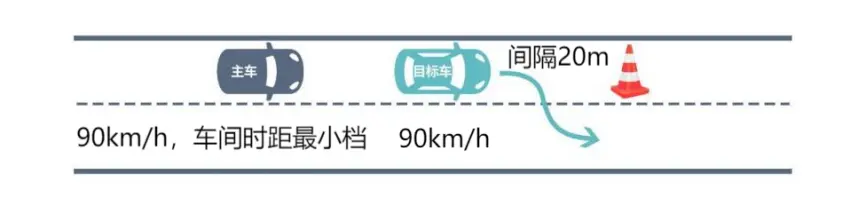
隧道入口前车切入场景(仿真)
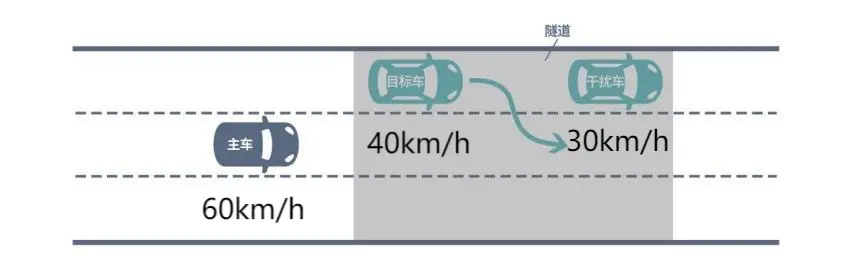
弯道前车并线行驶场景(仿真)
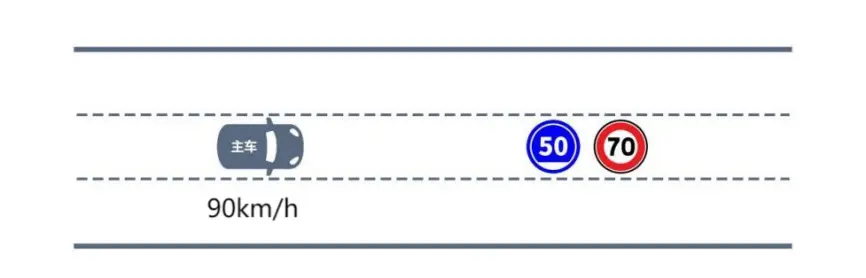
车辆限速标志场景(仿真)
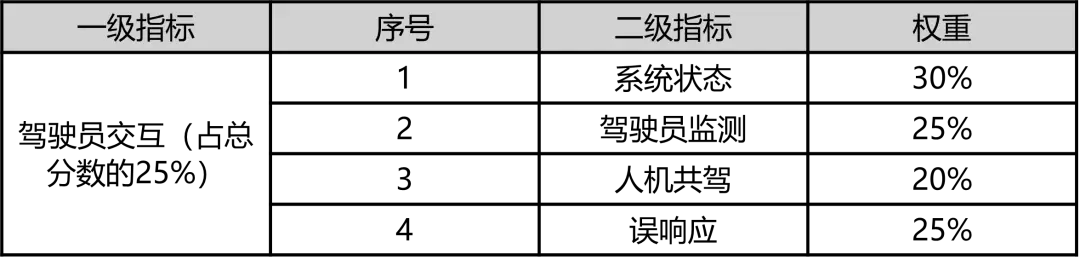
04 驾驶员交互
相较于1.1版规程,驾驶员交互的分数比重由20%提升至25%,同时还新增了人机共驾、误响应两个二级指标。
1 系统状态
系统状态项目要求车辆在启动后能向驾驶者表明系统的关闭、开启、激活等状态。此外,规程要求车辆在车道线部分缺失的情况下仍能激活基础行车辅助功能。


单车道线部分缺失测试场景
双车道线部分缺失测试场景
弯道外侧车道线部分缺失测试场景
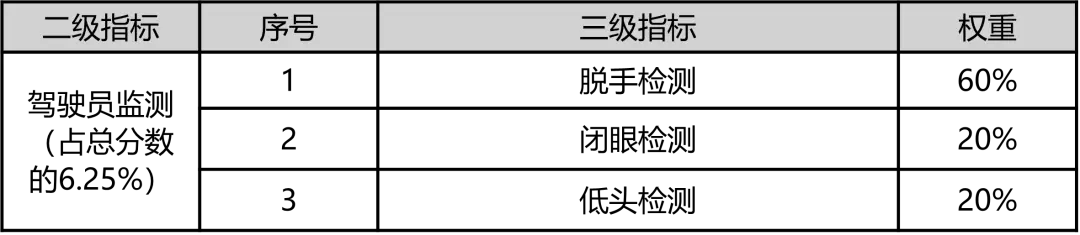
2 驾驶员状态
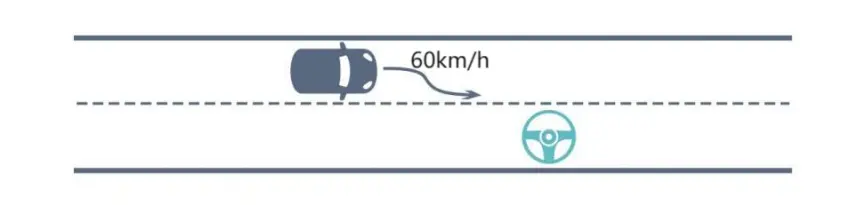
该项目重点考察车辆对驾驶员状态的识别与响应,要求车辆在驾驶员出现双手脱离方向盘、低头及闭眼等影响驾驶安全的行为时,系统需及时进行语音、声觉报警及进入最小风险策略。
3 人机共驾
人机共驾测试中,驾驶员向左或向右转动方向盘,使功能取消激活,试验车辆进入相邻车道保持居中行驶。该测试要求驾驶员实现接管所需施加的力矩不小于2牛米且不大于5牛米,且车辆变道成功后系统可以及时激活。

人机共驾测试场景
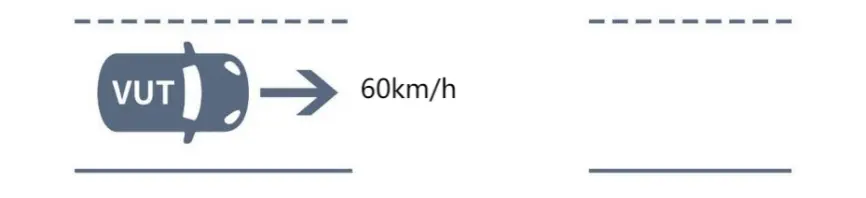
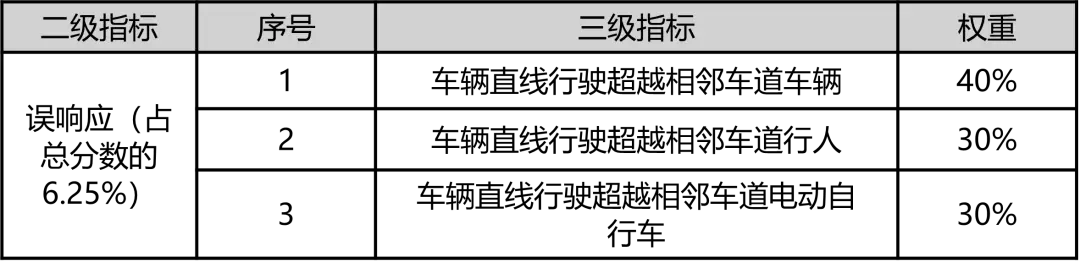
4 误响应
该场景要求车辆在直线行驶超越车辆、行人、电动自行车时,不得出现超过5m/s²的减速度,即系统不可出现错误响应,对驾驶舒适性和稳定性造成负面影响。
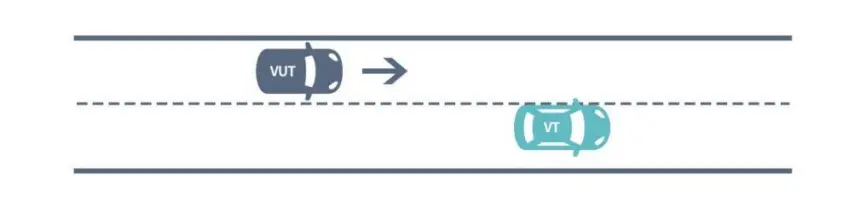
车辆直线行驶超越车辆/行人/电动自行车测试场景
- 下一篇:2024 年7月及以后实施的强制性国家标准
- 上一篇:英国汽车准入认证概述







最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
