




 广告
广告





















































E-NCAP 2024 高速公路和城际辅助系统-测试评估规则介绍

本文总结介绍了E-NCAP关于在高速道路和城际道路的部分ADAS系统的评估方法以及合格参数。
英文术语简称
接受测试的车辆(VUT)
--指根据本规程进行测试的车辆,车上装有碰撞前碰撞缓解或避免系统
全球车辆目标 (GVT)
--指本协议中使用的车辆目标。
辅助其他车辆(SOV)
--指"大型障碍车辆"。
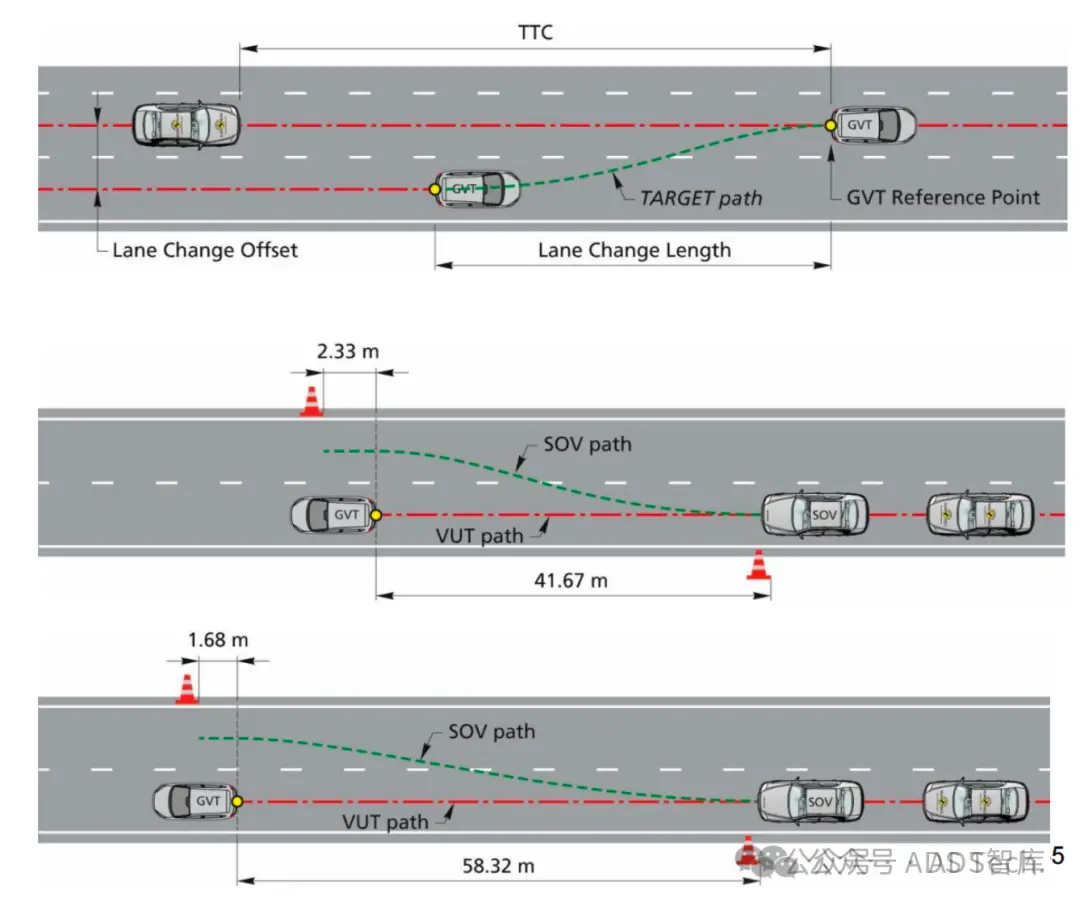
碰撞时间(TTC)
--指VUT撞上GVT之前的剩余时间,假设VUT和GVT继续以当前速度行驶。
车速辅助系统(SAS)
--通知或警告驾驶员和/或控制车速的系统
限速信息功能(SLIF)
—-车辆了解和传达速度限制的功能。
智能自适应巡航控制系统(iACC)
--iACC是一种与SLIF相结合的自动巡航控制系统,车速由SLIF在驾驶员确认或不确认的情况下设定。
限速功能 (SCF)
--一种允许驾驶员设定车速的系统,将车速限制在这个范围内,并希望在超过这个范围时得到警告。
自适应巡航控制系统(ACC)
--在控制车速的同时与前方车辆保持设定距离的系统
自主紧急制动(AEB)
--由系统自动进行制动,在检测到可能发生碰撞时,车辆会降低车速,并有可能避免碰撞。
自主紧急转向 (AES)
--由系统自动进行转向在检测到可能发生碰撞时,将车辆转向前方目标,以避免碰撞。
前撞警告(FCW)
--车辆在检测到可能发生碰撞时自动发出的视听警告,以提醒驾驶员。
车道支持系统 (LSS)
--一套横向控制功能,可修正车辆方向,使车辆保持在行驶车道内,并/或向驾驶员发出警告。
车道居中 (LC)
--通过影响车辆的横向移动,帮助驾驶员将车辆保持在所选车道内的功能。
变道辅助系统(LCA)
--由驾驶员启动/激活的功能,可在驾驶员发出指令后执行单次横向操作(如变道)。
车道保持辅助系统(LKA)
--在检测到车辆即将偏离划定边缘时,由车辆自动进行航向修正当前行车道的直线。
车道偏离警告(LDW)
--当车辆即将偏离当前车道划定的边缘线时,车辆会自动发出警告。
驾驶员状态监控(DSM)
--能够(直接)确定驾驶员状态的驾驶员状态监控系统
公路和城际辅助系统
对于高速公路和城际辅助系统,欧洲NCAP主要关注两个方面:辅助能力(即车辆辅助与驾驶员参与之间的平衡)和安全备份。
辅助能力和安全备份的得分总和被用于分级系统,类似于五星安全评级。
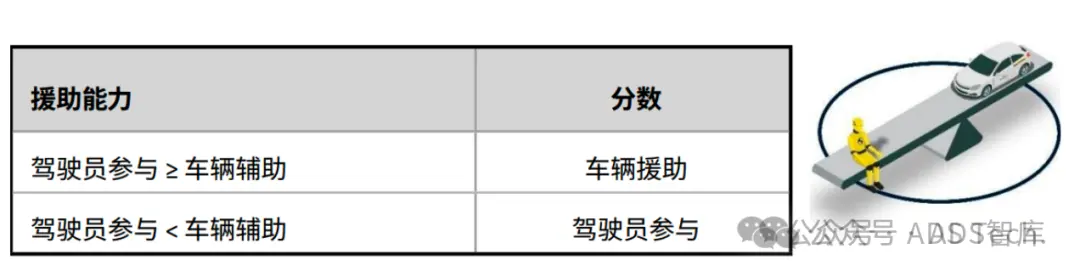
平衡原则
辅助能力得分是车辆辅助和驾驶员参与之间的平衡。辅助水平越高,驾驶员对系统的参与程度就越高。原则上,辅助能力得分等于车辆辅助得分,但前提是驾驶员参与得分(至少)与车辆辅助得分一致。如果车辆辅助得分高于驾驶员参与得分,则辅助能力得分仅限于驾驶员参与得分。
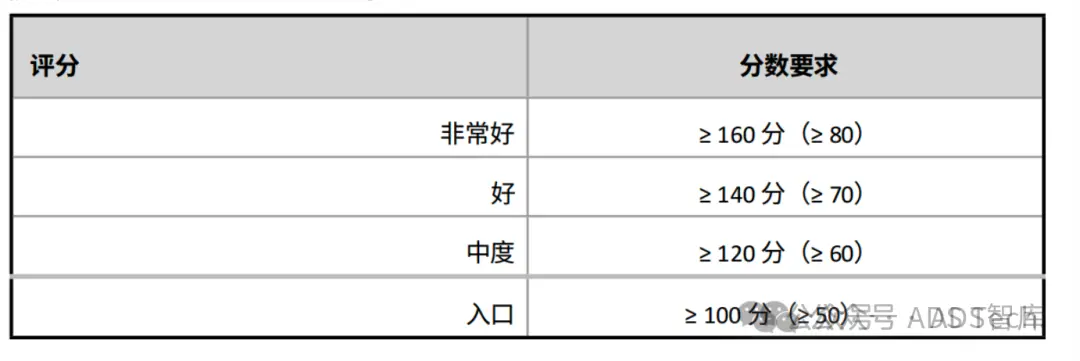
等级
辅助能力和安全冗余的总和决定等级:
辅助能力→→驾驶员参与
驾驶员参与度评估包括四个要素:
消费者信息 (Consumer Information)
系统状态 (System Status)
驾驶员监控(Driving Monitoring)
驾驶员合作(Driving Collaboration)
消费者信息 Consumer Information
驾驶员对系统所提供的ADAS辅助功能预期可能会受到他们在操作该系统之前所获的的信息的影响,应该像任何驾驶员说明该系统只是辅助系统,始终需要驾驶员的监督,评估检查是否向消费者提供有关本辅助系统有关的信息。包括该如何定义系统名称(系统名称应包含 "助手"、"协助"、"辅助"或该词的其他变体),不得包含“自动”、“领航”、“自动驾驶”等暗示自动化程度高的术语。是否有系统说明书,是否有快速入门指南,在车辆出厂销售环节是否有提醒驾驶员仔细阅读系统须知。
系统状态 System Status
要求系统要持续的评估目前辅助系统提供给驾驶员的信息状态及目前的辅助水平,要及时反馈给驾驶员。
仅提供视觉信息(以防辅助等级提高)。
视觉信息和声音或触觉警告(以防辅助等级下降)。
主机厂采用不同的方法向驾驶员显示系统状态,无论是持续显示还是在改变辅助时瞬间显示都要体现在驾驶员信息里。所有系统状态指示器都应该作为辅助系统的一部分安装在车辆上,且其优先级要高于其他系统(即在驾驶员关闭禁用主要指示器时还是可以触发状态警告)
持续系统状态指标评估
在评估过程中,车辆应按规定的方式行驶,以达到评估各部分所需的正确辅助水平。这意味着应在以下情况下至少驾驶一次:
手动模式(待机,无辅助)
仅纵向对照(如ACC)
仅横向控制(如有)
纵向和横向控制相结合
系统状态变化指标评估
对驾驶员直观的特定策略进行奖励(比如,在驾驶员对方向盘施加一定扭力时,系统不在提供纵向的支撑)在此系统状态的每一次变化,尽可能不进行与驾驶员大相径庭的操作,其中此系统的评估加分项有:
(1)是否提供声音或触觉警告 + -
(2)是否提供额外的视觉警告 + -
(3)状态信息是否符合人为因素准则 + -
(4)驾驶员拒绝状态信息更改请求时,是否有额外的视觉提醒信息 + -
驾驶员监控 Driving Monitoring
驾驶员不得执行任何超出正常驾驶允许范围的辅助任务,通过方向盘的有效活动来检测驾驶员的有效监控情况。
监测
联合国第79号法规修订版4规定了在转向辅助系统激活的情况下,驾驶员松开转向控制时VUT进行干预的最低要求如下:
- 在松开转向控制后 15 秒内发出光学警告。
- 在松开转向控制后 30 秒内发出声音警告和红色光警告。
- 在发出声音警告后 30 秒内停用系统。需要额外的声音警告(不同于之前的警告)至少 5 秒。
此外,在最多累计 3 次严重脱手警告后,辅助模式应在剩余行程中锁定。严重脱手应视为达到系统停用阶段,或在原始设备制造商认为适当的更早时间(例如,发出声音警告和红色光警告+ 5 秒响应时间)
传感
通过电容或直接或AI视觉识别传感(即非仅基于扭力的传感)对驾驶员的监控进行传感,可以判断驾驶员是否用特殊方法欺骗系统
辅助能力→→车辆辅助
车辆援助评估包括三项内容:
速度辅助
自适应巡航控制系统性能
转向辅助
速度辅助
在自动巡航控制系统中,车辆可以采用当时的限制或者显示速度限制信息,或由驾驶员二次确认采用,可以自我调整或者更改速度的系统可以称为iACC
对速度限制变化的反应
车辆在到达限速标志牌前应调整车速,在一些欧盟国家,允许在行驶一定距离后才会提出起诉。
车辆制造商应提供以下车辆对限速变化的反应信息:
固定速度限制
可变和临时速度限制
自动将车速调整到所需限速的系统,如果在车辆前轴通过标志前,车速已降至较低限速 +2km/h,则视为已及时采用限速。
提供新速度限制调整但需要驾驶员手动操作的系统,如果在提供较低速度限制后1.5 秒,驾驶员做出确认动作,车辆前轴通过标志前,车速已降至较低速度限制+2km/h,则视为已及时采用速度限制。
只提供即将到来的和当前速度限制信息的系统,如果向驾驶员显示速度限制较短信息的时间允许驾驶员手动将自动控制设置为速度限制较短的时间,并且在车辆前轴 通过标志前将车速降至速度限制较短的时间+2km/h,则应视为及时提供了信息,此时驾驶员在信息发出后1.5秒开始这一过程。
对道路特征的反应
除了根据道路限速来改变ACC系统的速度限制外,在系统识别接近以下道路特征时,附加降低车速点。
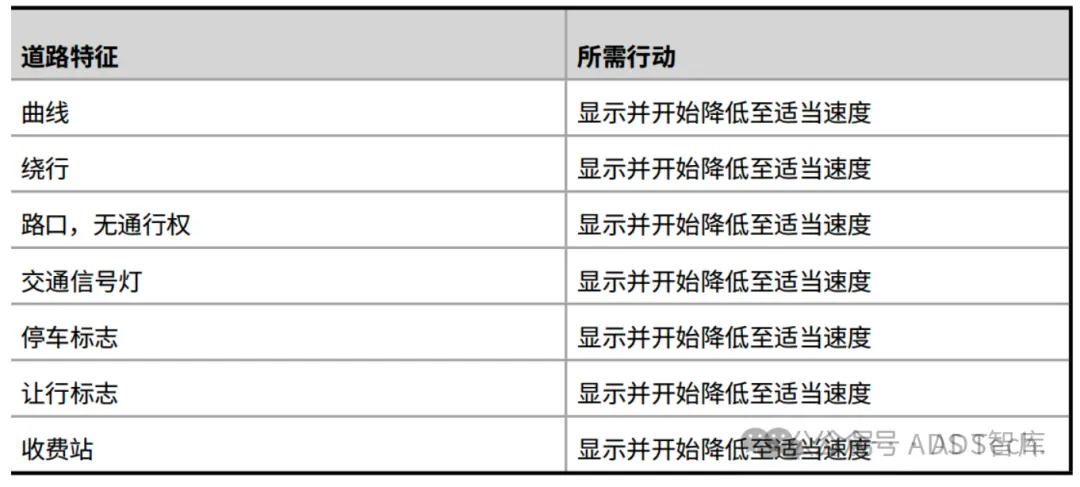
除了根据道路限速来改变ACC系统的速度限制外,在系统识别接近以下道路特征时,附加降低车速点。
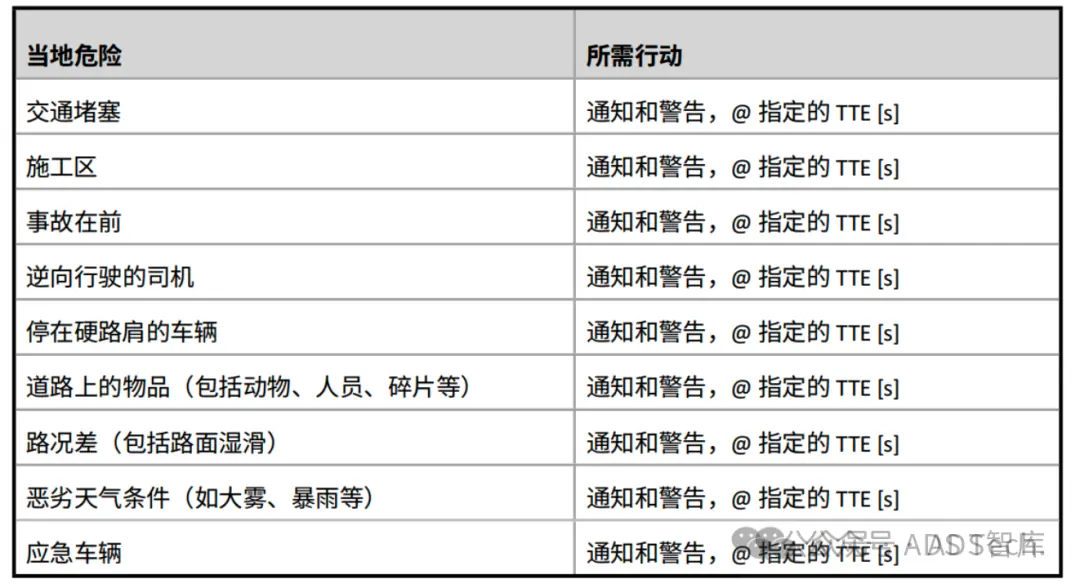
危险信息
对下表所列危险事件及时向驾驶员发出通知和警告,这使驾驶员有足够的时间预见危险事件,TTE(事件发生时间)应由车辆制造商指定。规定的TTE可能因事件和环境而异,预计在5至20秒的范围
内。
自适应巡航控制系统性能
自适应巡航控制系统性能评估考察车辆安装的纵向辅助系统在运行过程中对其他车辆的反应。对于高速公路和城际辅助系统,则评估车对车和车对摩托车的性能。主机厂需要向NCAP提供彩色数据(不要求提供预期撞击速度),详细说明车辆在所有速度组合的CCRs、CCRm、CMRs和CMRm情况下的自动协调性能。
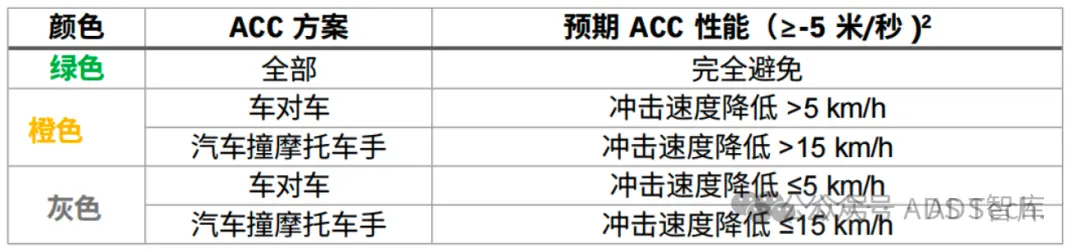
- 1.CCRs(Car-to-Car Rear stationary):车辆对前方静止车辆的情况。这种情况下评估自动巡航控制系统在前方有静止车辆时的性能。
- 2.CMRs(Car-to-Motorcycle Rear stationary):车辆对前方静止摩托车的情况。这种情况下评估自动巡航控制系统在前方有静止摩托车时的性能。
- 3.CCRm(Car-to-Car Rear moving):车辆对前方移动车辆的情况。这种情况下评估自动巡航控制系统在前方有移动车辆时的性能。
- 4.CMRm(Car-to-Motorcycle Rear moving):车辆对前方移动摩托车的情况。这种情况下评估自动巡航控制系统在前方有移动摩托车时的性能。
如果ACC完全避免了碰撞,则可获得分数。如果在自动紧急制动系统(AEB)干预之前,ACC将碰撞速度降低了5km/h以上,则可获得0.5分。如果自动紧急制动控制系统未将撞击速度降低5km/h以上,则不得分。
转向辅助
转向辅助功能应帮助驾驶员保持车辆在车道内行驶,而不仅仅是在笔直的道路上。如果车辆偏离车道,则会增加碰撞风险。欧洲NCAP并不要求车辆在所有弯道上都保持在车道中央,而是希望系统始终通过引导车辆正确行驶来为驾驶员提供支持。
安全冗余
安全备份评估包括三项内容:
系统故障
反应迟钝的司机干预
避免碰撞
系统故障
在实际驾驶过程中,预计驾驶员辅助系统的相关传感器(雷达、激光雷达或摄像头)可能会因老化或损坏而退化,或在不利的环境条件下堵塞。传感器堵塞或老化可能会降低系统的能力。
重要的是,系统不能在能力降低的情况下运行,而且驾驶员要知道系统不可用的原因。当一个传感器出现故障时,所有现有系统的能力都可能会有所下降,但系统中可能会内置冗余或使用多功能传感器,以减轻单个传感器出现故障时对系统性能的影响。
反应迟钝的司机干预
测试车辆对一连串警告后仍无反应的驾驶员的最终反应,并尝试重新启动驾驶员(包括声音,视觉提醒,以及采取必要的减速甚至停车行为)该测试可与驾驶员监控评估同时进行。
避免碰撞
评估车辆上安装的纵向辅助系统在运行过程中对其他道路使用者的反应,但在无法通过制动避免碰撞的危急情况下,也允许通过车道内转向操作来避免碰撞。考察车辆利用辅助驾驶系统和应急系统避免汽车与汽车、汽车与摩托车、汽车与自行车和汽车与行人碰撞的能力。
以上是对 E-NCAP 高速公路以及城际道路评估及测试规范部分的简单总结,其中未列出详细测试方法,对车辆辅助功能的要求以及奖励行为进行小结。ADH&IAST&API 24V2.1







最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
