




 广告
广告





















































自动驾驶认证之联合国制动法规UN R13-H

在联合国WP29的第193次会议上,表决通过了一项对联合国制动法规UN R13-H的增补文件。
虽然法规修订的本意是为了使UN R13-H的规定能够适应当前自动驾驶车辆和技术的发展状态,但是研究之后发现,这次可能意外地解决了“单踏板模式”所带来争议。
简单地说,新的对UN R13-H的01系列修订的增补5将会澄清“单踏板模式”和A类电力再生制动系统的关系。

简单地回顾一下本号对“单踏板模式”的相关讨论。
首先,在对乘用车制动系统的新国标草案(GB 21670征求意见稿)的分析中,笔者认为国标草案中的规定并没有真正的禁止“单踏板模式”,且新规定难以有效地解决《编制说明》中所提到的问题。
之后,笔者分享了欧盟各成员国的车辆认证管理机构做出的一个与“单踏板模式”有关的决定,认为该决定一方面考虑欠周,另一方面很可能影响到“单踏板模式”车辆的市场准入。
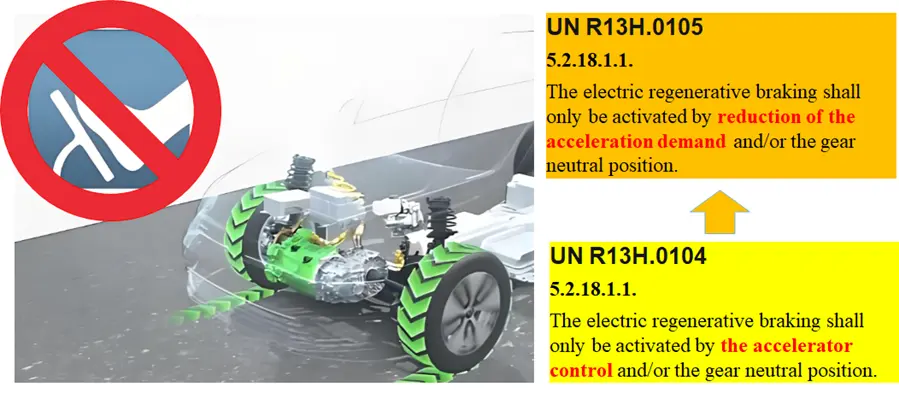
WP29刚刚通过的对联合国制动法规UN R13-H的增补文件(01系列修订的增补5),原本是考虑到自动驾驶系统ADS在对车辆进行控制时,可能不会实际操纵加速踏板(“accelerator control”),因此法规希望对A类电力再生制动系统的操控要求调整为与加速命令(“acceleration demand”)有关的表述方式。
现行UN R13-H法规的规定如下:

修订后,相应的要求变为:

这一变更虽然是基于ADS的特性而提出的,但是包括该条款在内的要求也同样适用于非自动驾驶车辆。
因此,在考虑A类电力再生制动系统的符合性时,其依据将从“acceleratorcontrol”的状态转变为“acceleration demand”的状态。
按照新的要求,加速命令(“acceleration demand”)的减少允许产生一个制动命令来使用A类电力再生系统,但减少后终究还是“accelerationdemand”。因此,可理解如下:
在加速命令减少到零之前,车辆应能保持运动或者应持续提供驱动力,类似传统汽车松油门的情况。
对于A类电力再生系统,“加速命令的状态”将成为它的一种开关操控(“Control”)方式。
在任何位置和情况下增加加速命令,均应关闭A类电力再生制动。
基于正常的逻辑,加速命令应不会减少成为负值。
因此,可以说,新法规生效后,单踏板模式将会面临真正的考验。
理论上,真正的“单踏板模式”设计将无法按照UNR13-H的01系列修订获得车辆认证。
值得一提的是,目前申请欧盟整车型式认证(WVTA)并不需要满足UN R13-H的01系列修订的技术要求,正在进行中的对通用安全法规Reg.(EU) 2019/2144的修订也没有考虑在欧盟强制实施01系列修订。
不过,如之前文章中提到的欧盟法规更新计划,2025年欧盟或将更新对UN R13-H的要求。
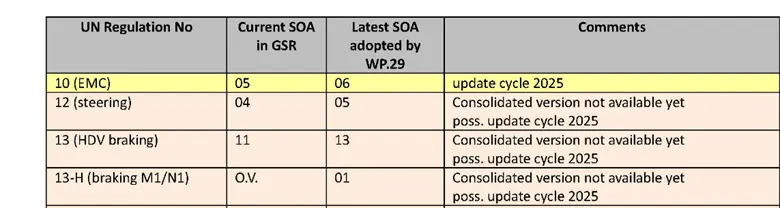
然而,对于按照UN R13申请认证的M2、M3、N1、N2、N3等类别的车辆来说,同样的修订内容,不仅包含在对UN R13的13系列修订的增补中,还包含在对11系列修订和12系列修订的增补中。因此当新增补生效后,新的按照UN R13申请认证的车型就需要慎重考虑A类电力再生制动系统的设计了。



编辑推荐



最新资讯
-
全球首次!IVISTA 2023版修订版引入带灯光
2025-04-28 09:59
-
我国首批5G毫米波行业标准送审稿审查通过
2025-04-28 08:56
-
5/16 厦门- 新能源汽车电驱测试技术的创新
2025-04-28 08:53
-
国内首个汽车电磁防护技术验证体系EMTA正式
2025-04-28 08:49
-
一文带你了解滤波器
2025-04-28 08:35
