




 广告
广告





















































4D毫米波雷达比3D毫米波雷达多了什么?

毫米波雷达是指天线发射的波长在1-10mm,频率在30-200GHz的电磁波。
常见的倒车用的超声波雷达适合近距离固定物体的检测,毫米波雷达更适合远距离移动物体的检测。
汽车ADAS系统中常使用毫米波雷达,比如自适应巡航ACC、前方碰撞预警FCW、后方横穿预警RCTA等。

RCTA后方横穿预警系统
传统的毫米波雷达通过检测雷达信号反射的回波,可以测出汽车与探测目标的相对距离、速度、角度等信息。
比如RCTA系统中在车尾两侧安装的超声波雷达,后方探测距离为4米,左右侧后方探测距离为30米,可以检测此范围内的机动车、自行车和行人等移动物体。
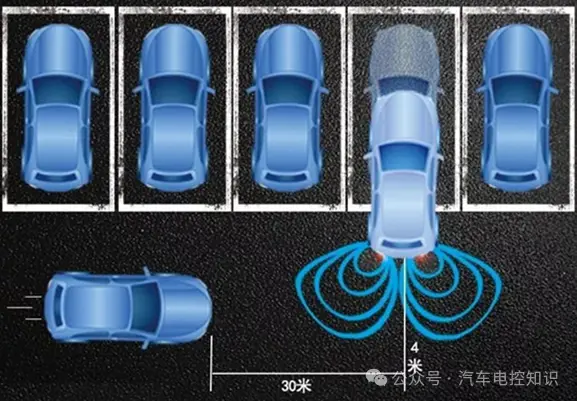
RCTA后方探测距离4米,左右侧后方探测距离30米
系统先根据雷达提供的探测信号计算出目标物体的速度、再根据本车的速度和本车的行驶轨迹,计算出后方物体与本车的碰撞时间,根据碰撞时间进行报警。
传统毫米波雷达因为可以探测到距离、方位和速度三个维度的信息,也称为3D毫米波雷达。
4D毫米波雷达是在3D毫米波雷达的基础上扩展而来,因此我们先了解下3D毫米波雷达的工作原理。
1. 毫米波雷达的理论基础-多普勒效应
毫米波雷达的基本原理来自多普勒效应。多普勒效应是指波源和观察者有相对运动时,观察者接收到的频率和波源发出的频率并不相同,两者之间的差值叫做多普勒频率。
产生这一现象的主要原因是波长会随着波源和观察者的相对运动而产生变化,在运动的波源前,波被压缩,波长变得较短,频率变得较高;在运动的波源后面,波长会变得较长,频率变得较低;波源的速度越高,所产生的效应越大。根据波移的程度,可以计算出波源循着观测方向运动的速度。
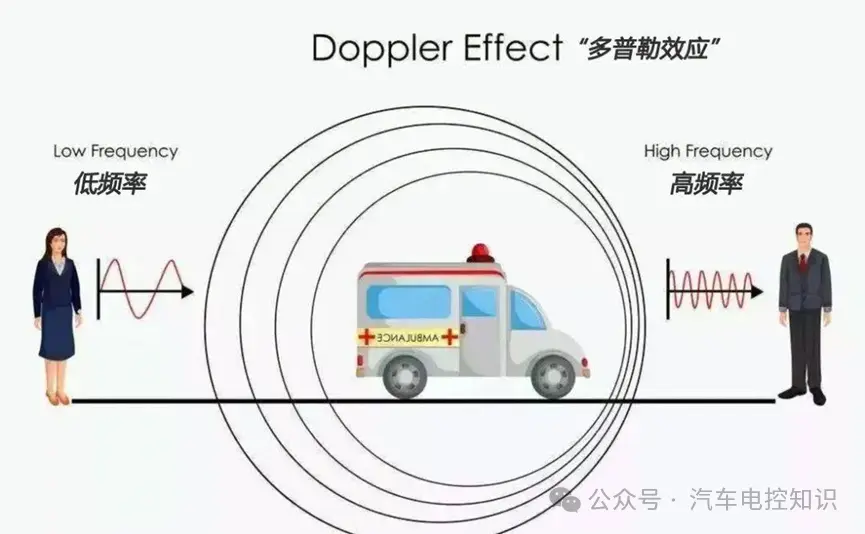
多普勒效应波长变化示意图
多普勒效应可用公式表达如下:
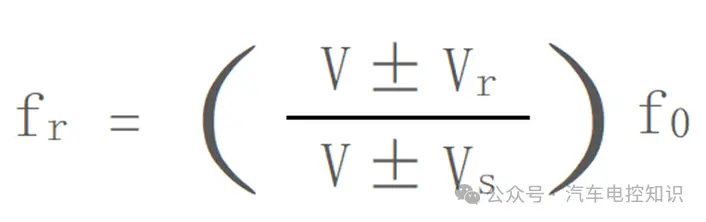
式中,fr为观察者观测到的频率,f0为波源发出的频率,V为波的传播速度,Vr为观察者的速度,Vs为波源的速度。
Vr为观察者移动速度,若接近发射源则前方运算符号为 + 号, 反之则为 - 号;
Vs为发射源移动速度,若接近观察者则前方运算符号为 - 号,反之则为 + 号。
通过公式可以看出,观察者与发射源接近时,分子变大,分母变小,观察者接收到的频率比原始频率变高,波长比原始波长变短。
反之,远离的时候,分子变小,分母变大,计算得到的频率比原始频率变低,波长变长。
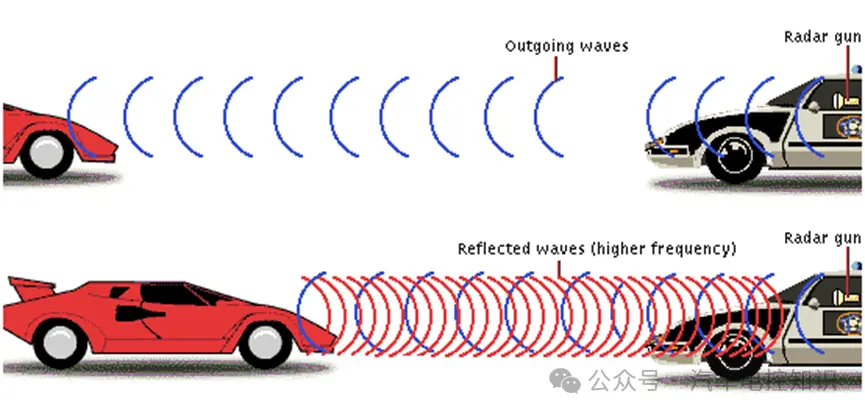
接近时,频率变高;远离时,频率变低
通过检测多普勒频率,就可以测得观察者相对于光源的移动速度。再根据波发出和接收的时间差,便可以计算出观察者相对于光源的距离。
多普勒效应中的波长变化有点像游泳时的水波纹变化,向前游泳时,身体推着水波走,前面的水波纹变密集,身后的水波纹会变稀疏。

多普勒频率变化类似水波纹变化
毫米波雷达运用多普勒频移原理不仅可以实现对目标移动速度和距离的测定,还可以检测目标的方位。
毫米波雷达的发射天线发射出毫米波后,通过毫米波雷达并列的接收天线,通过收到同一监测目标反射回来的毫米波的相位差,就可以计算出被监测目标的方位角。
2. 毫米波雷达组成
毫米波雷达控制器主要由收发天线(TX&RX),射频单元(RF)、模数转换器 (ADC)、数字信号处理器 (DSP)、微控制器 (MCU)等组成。
目前毫米波雷达的芯片已经高度集成,不仅将射频芯片、数字处理芯片和微控制器集成在一起,甚至也可以将天线集成在芯片中。
2.1天线
当天线的长度为电磁波波长的1/4时,天线的发射和接收转换效率最高。而毫米波的波长只有几个毫米,所以天线可以做得很小。通过使用多根天线来构成阵列天线,可以让电磁波的波束变得很窄,而窄波束可以达到更高的方位角分辨率。
目前毫米波雷达天线主要是采用微带阵列的方式,常见的方式是在高频PCB上集成“微带贴片天线”,再将高频PCB集成在雷达主板上。

微带贴片天线
2.2 RF
RF射频部分负责信号调制、发射、接收以及回波信号的解调。
相关功能电路主要包括低噪声放大器、功率放大器、混频器、检波器、调制器、压控振荡器、移相器、开关等部件。
2.3 DSP
DSP通过嵌入不同的信号处理算法,提取从前端采集得到的中频信号,获得特定类型的目标信息,DSP计算数值的高精度可用于保证毫米波雷达稳定性和可靠性。
2.4 MCU
MCU根据DSP输出的目标信息,结合车身动态信息进行数据融合,进行最终的决策处理。
3.FMCW调频连续波
根据发射电磁波方式不同,毫米波雷达主要分为脉冲波和连续波两种类型。
脉冲波由于高成本、高体积、高功耗的缺点,车载毫米波雷达很少使用。
连续波中的FMCW(调频连续波)方式由于具有同时检测多个目标、分辨率较高、成本较低等优点,成为车载雷达首选的类型。
FMCW类型的波形是 Chirp波形,chirp是指一种频率随时间变化的信号,其时域波形图如下所示:
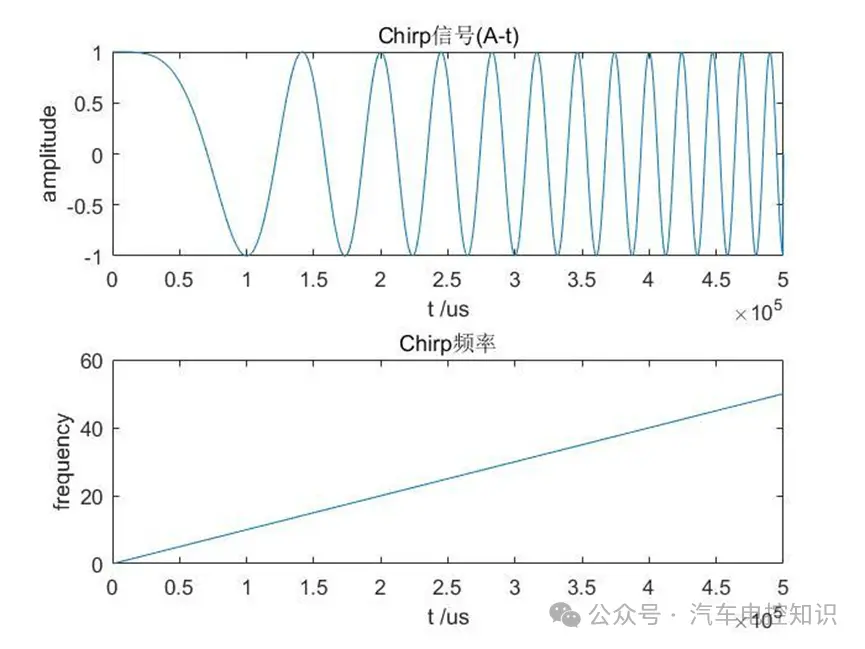
Chirp信号时域波形
FMCW是一种频率随时间线性增加的Chirp波形,增长的斜率,也就是频率线性增长的速度,叫做调频率。
比如77G毫米波雷达,chirp的起始频率为77GHz,以1GHz/us的调频率达到81GHz时,就会发射一个脉冲宽度为40us的线性调频信号。
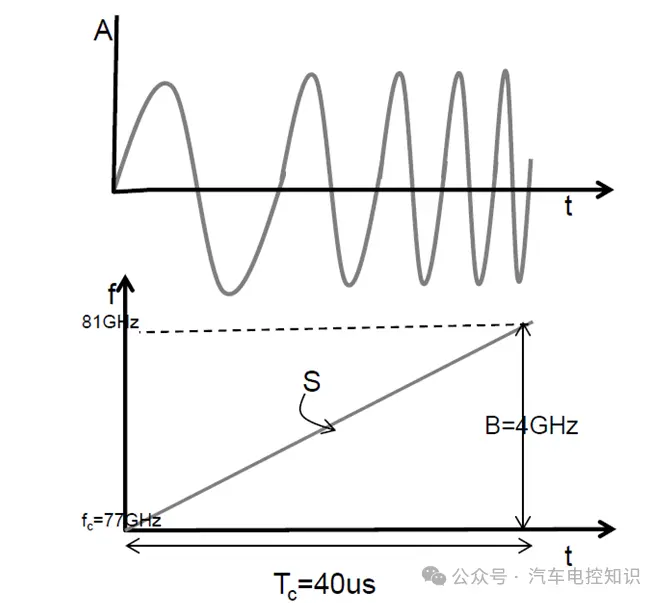
线性调频信号发射示例
FMCW雷达由发送天线(Tx Antenna)、接收天线(Rx Antenna)、混频器(Mixer)、时钟源晶振(Osillator)、ADC和DSP组成。
毫米波雷达内部将信号合成后,会以帧为单位,均匀等时间间隔的通过发射天线发出Chirp信号。
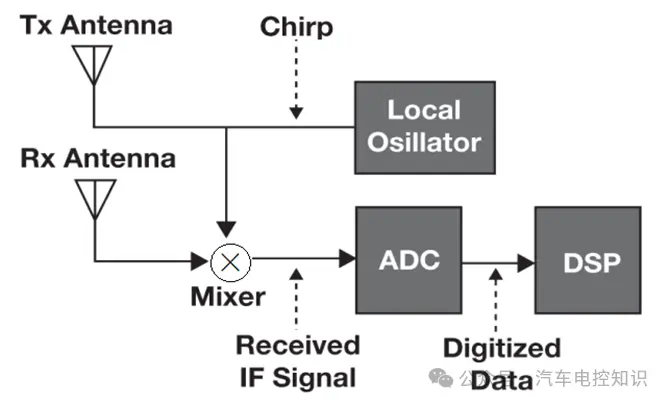
FMCW雷达系统原理框图
在毫米波雷达接收天线收到发射回来的电磁波后,会将回波信号与发射信号一同送入混频器内进行混频。由于发射信号在遇到被测目标并返回的这段时间内,回波信号的频率相较发射信号已经发生了改变。而混频器的目的就是计算出发射信号与回波信号之间频率差,称之为中频信号。
中频信号经过滤波、放大、模数转换和测频等处理后就可以获得被测目标的距离信息。
对于速度测量,由于被测目标距离的不同,毫米波雷达接收到的回波信号相位也会不同。通过对一帧中所有单个chirp信号进行等间隔采样,并将采样点的数据进行傅里叶变换,然后利用相位差就可以计算出被测目标的速度。
对于角度测量,利用多个接收天线接收同一个回波信号,并计算回波信号之间的相位差来实现角度测量。
4. 4D毫米波雷达
传统的毫米波雷达只能输出距离、速度和角度三个维度的信息,所以也称为3D毫米波雷达。
从几何坐标系的角度来看,雷达探测信息中的距离D和角度θ是平面坐标系下的数据,如下图所示:
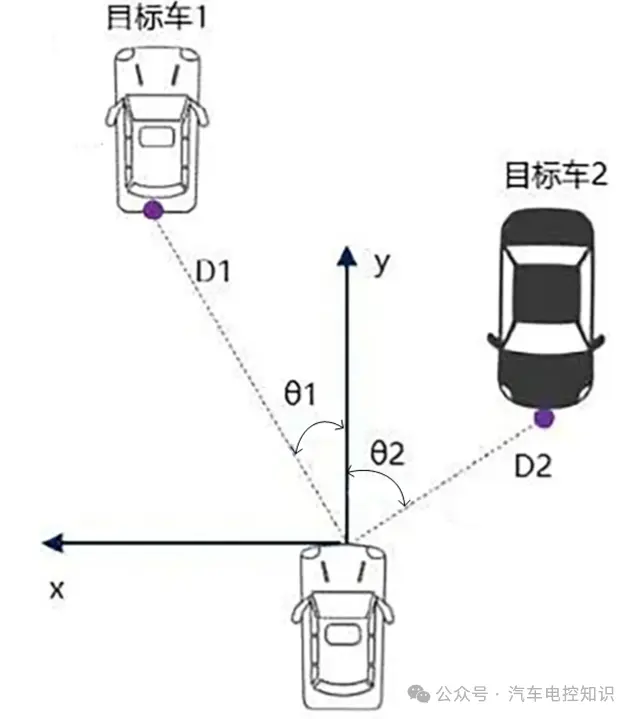
3D毫米波雷达坐标系
通过坐标系,我们可以获得目标车在x轴和y轴两个方向上的信息。但是由于不是立体坐标系,我们无法获得Z轴方向上的信息。
Z轴就是对应目标物体的高度,车辆行驶时,对于移动物体(车辆、行人等)来说,高度信息好像并不重要,也不需要知道。
但是在一些特殊场景,有些物体的高度信息还是需要检测的,比如道路中的石块、井盖、空中飞行的鸟、漂浮的物体,悬在半空中的各种标识牌,限高架等。
由于没有高度信息,通过3D毫米波雷达无法区分高处物体和地面物体,难以判断这些障碍物是否影响通行,容易造成误刹,影响行驶安全性。
此外,传统雷达的理论基础是多普勒效应,多普勒效应适合检测相对移动的物体,
当有静止车辆时,目标信息容易和地杂波等掺杂在一起,识别难度较大。
当有横穿车辆和行人时, 多普勒为零或很低,也很难检测。
4D毫米波雷达就是在原有的距离、方位、速度三个维度基础上增加了高度信息。相比传统毫米波雷达仅能判断出前方有障碍物,4D毫米波雷达增加了纵向天线及处理器,可以接收更多信息返回点,并像激光雷达一样呈点云图,能呈现出更多细节信息,更易于三维建模,弥补了传统雷达难以识别高度这个维度信息的缺点。
4.1 俯仰角测量
角度测量原理中,需要通过多个接收天线接收同一个回波信号来计算相位差从而实现方位角的测量。而受制于成本和体积的限制,当前毫米波雷达使用的多是单片收发器。而要想实现俯仰角的测量,就必须增加虚拟通道的数量,最容易实现方法就是将多个单片收发器级联。
比如将4片MMIC级联,实现12发16收,总计达192个虚拟通道。这比经典常见的3D毫米波雷达的3发6收18个虚拟通道方案,虚拟通道总数上多10倍。分辨率是直接和虚拟通道的数量成正比的。
4D毫米波雷达通过精确探测俯仰角度,获取被测目标真实的高度数据,也就是目标物体在坐标系下z轴方向上的距离。
4D毫米波雷达不仅更容易识别静止物体和高度信息,在分辨率上也获得极大提高。其水平和垂直分辨率分别可以达到1°和2°左右,水平分辨率比普通3D毫米波雷达提升5~10倍。垂直方向上分辨率的提高,也让4D毫米波雷达在扫描同一物体时可获扫描的点的数量极大增加,物体形状的辨识度可大大提高。
当然,硬件级联的方式也有缺点,成本、尺寸、功耗会大幅增加,工艺更复杂、大量天线之间的干扰也会增加。
除了硬件级联的方案,也在开发依靠AI算法增加虚拟通道数的方案,希望通过软件算法来解决硬件方案的不足。
4.2 优势与特点
4D毫米波雷达系统水平角度分辨率较高,通常可以达到1°的角度分辨率,可以区分 300m 处的两辆近车,可探测的距离更远。
4D毫米波雷达系统可以测量俯仰角度,可达到2°的角度分辨率,可在 150m 处区分地面物体和立交桥等高空物体。
当有横穿车辆和行人, 多普勒为零或很低时通过高精度的水平角和高精度的俯仰角可以有效识别目标。
4D毫米波雷达的目标点云更密集,信息更丰富,更适合与深度学习框架结合。
当然,4D毫米波雷达也有一些不足之处,比如由于天线阵列设计复杂,需要提升阵列使用效率。雷达与雷达之间的干扰加重,提高了抗干扰设计的难度。此外,传统毫米波雷达用CAN或CAN-FD连接,4D毫米波雷达信息量大,需要使用10OMbps的以太网接口。
5. 小结
毫米波雷达在探测能力、穿透能力、抗干扰能力等方面比较均衡,很适合车载领域的全天时、全天候的要求。4D毫米波雷达技术突破了传统3D雷达的局限性,除了可以以很高的分辨率探测动态目标的距离、速度、方位信息,还可以通过测量俯仰角来探测飞鸟、限高牌、立交桥等高度信息。此外,4D毫米波雷达探测静态物体、横穿车辆和行人的能力更好!



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
