




 广告
广告





















































规程解读 | C-NCAP管理规则(2024年版)附录L主动安全ADAS试验规程解读

近年来,随着车载硬件算力和软件算法的飞速提升,越来越多的主动安全功能被搭载在车辆上,自动紧急制动系统(AEB)、车道保持辅助系统(LKA)等辅助驾驶功能,能够在更加多元、复杂和危险的工况下提醒驾驶员或控制车辆,避免交通事故发生,从而保护车内人员和车外交通参与者,对提升道路交通安全具有重要意义。
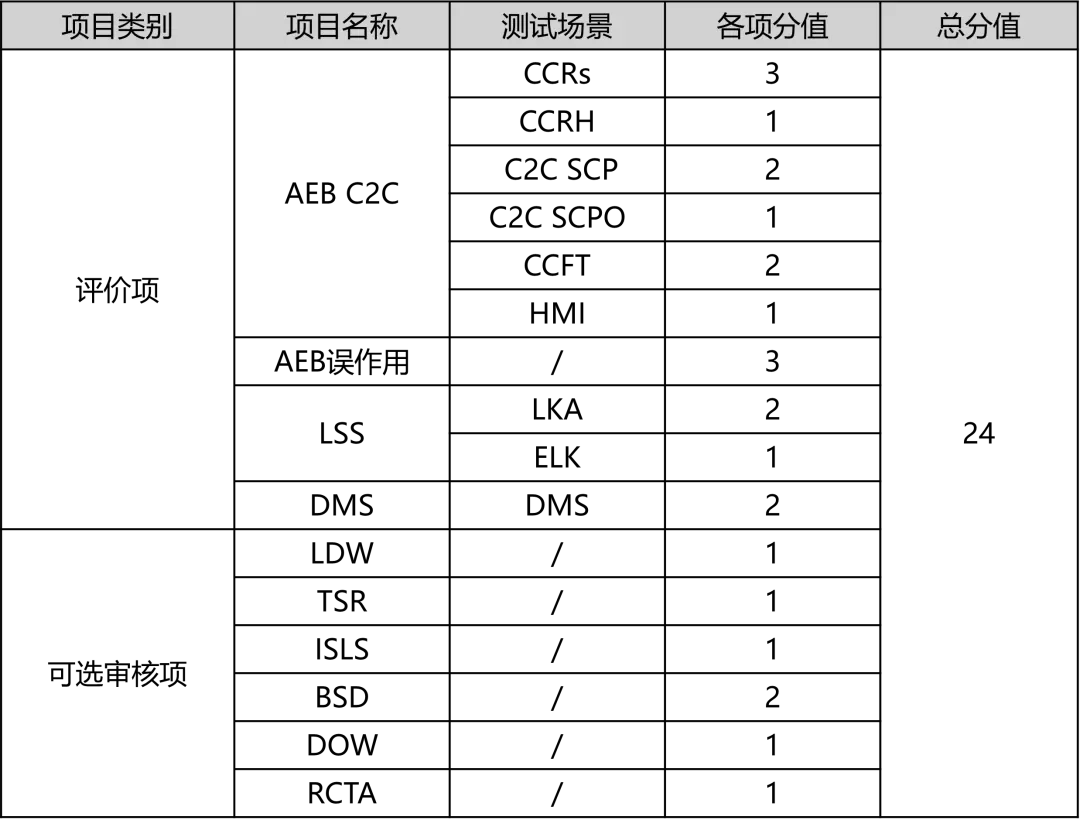
自2024年7月起实施的中国新车评价规程(C-NCAP)2024版,在主动安全性能评估方面进行了全面升级。该版规程的主动安全板块主要分为两部分:一是主动安全先进驾驶辅助系统(ADAS),二是针对弱势交通参与者的自动紧急制动系统(AEB VRU)。在ADAS部分,又细分为评价项和可选审核项两个子板块,以更准确地衡量车辆的主动安全性能。
据中汽研科技有限公司(简称“中汽研科技”)智能网联汽车研究部平台总监周建华介绍,2024版C-NCAP相较于2021版C-NCAP,在场景复杂度和评价全面性方面有了显著提升,对智能网联汽车主动安全性能的考验也更加严峻。在评价项方面,2024版C-NCAP新增了目标车辆横穿、被测车辆转弯和AEB误作用等AEB测试项,以及紧急车道保持(ELK)和驾驶员监控系统(DMS)测试项;在可选审核项方面,2024版C-NCAP新增了交通信号识别(TSR)、车辆开门预警(DOW)和后方交通穿行提示系统(RCTA)测试,以进一步提升车辆安全性能的评估标准。
01 车辆自动紧急制动系统(AEB C2C)
AEB C2C占评价项总分的55%,是2024版C-NCAP最关注的车辆功能之一。AEB C2C对车辆在车对车场景下的自动紧急制动能力进行检验,并根据不同场景和测试速度点,依据是否碰撞、碰撞速度和报警时机等进行加权评分,全面地评价测试车辆在各类危险工况下的AEB表现。
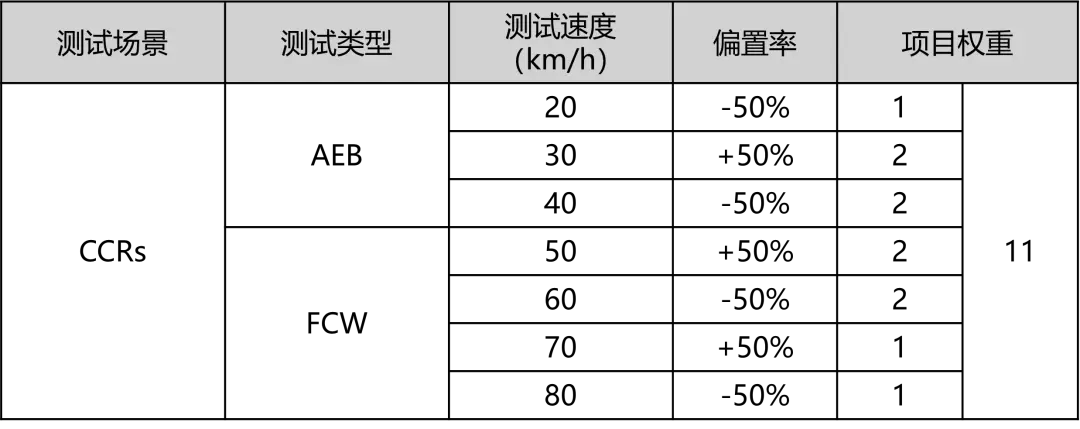
1 车辆直行与前方静止目标车辆测试场景(CCRs)
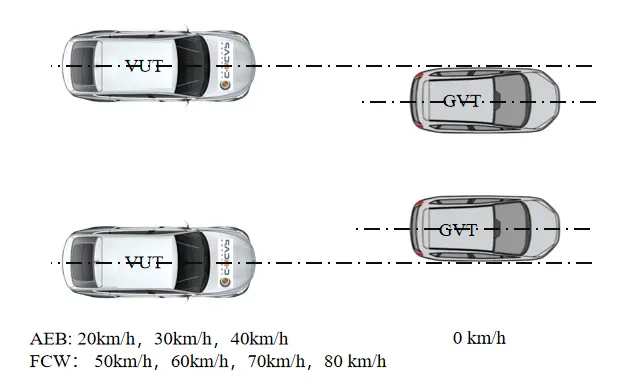
CCRs测试场景示意图
CCRs测试场景下,AEB的测试范围为20kph~40kph,考验车辆在无驾驶员介入情况下的紧急制动能力;FCW的测试范围为50kph~80kph,考验车辆在有驾驶员介入情况下的紧急制动能力。两类场景均为偏置场景,对车辆的感知和执行能力提出了较高要求。
2 车辆高速直行与前方静止目标车辆测试场景(CCRH)

CCRH测试场景示意图
CCRH测试场景下,测试车辆的速度分别为80kph和120kph。该场景主要考验车辆在高速状态下的目标识别转换能力。此外,测试车辆和GVT可具备C-V2X的能力,这为V2X技术的实际应用奠定了基础。
3 车辆直行与前方横穿目标车辆测试场景(C2C SCP)

C2C SCP测试场景示意图
C2C SCP测试场景中,AEB的测试速度点为20kph和30kph,FCW的测试速度点为50kph和60kph,考验被测车辆在目标车辆横穿的场景下的感知和执行能力。该场景真实地反映了无红绿灯交叉路口车辆突然横穿的状况,有助于提升道路交通安全。
4 车辆直行与前方被遮挡的横穿目标车辆测试场景(C2C SCPO)
C2C SCPO测试场景测试车辆的FCW功能,测试速度点为50kph和60kph,考验被测车辆在右前方有遮挡时的目标检测能力,难度较大。

C2C SCPO测试场景示意图
5 车辆左转与对向目标车辆测试场景(CCFT)

CCFT测试场景示意图
CCFT测试场景测试车辆的AEB功能,速度范围为10kph~30kph,考验被测车辆在左转时的紧急制动能力,还原了驾驶员转向时视野被部分遮挡的危险场景,提升了测试的全面性。
6 AEB C2C人机交互(HMI)
HMI主要对AEB和FCW功能的关闭和报警方式以及安全带是否具有预紧功能进行考察,旨在更好地保护车内人员的安全。
02 自动紧急制动系统误触发(AEB False Reaction)
AEB误触发汇总了实际道路上经常出现的可能导致AEB误作用的10类场景,测试目标物包括行人、二轮车、车辆以及护栏。周建华认为,该场景有助于企业更加精确地设置AEB的触发条件,减少其误触发的概率,提升驾乘体验和道路安全。
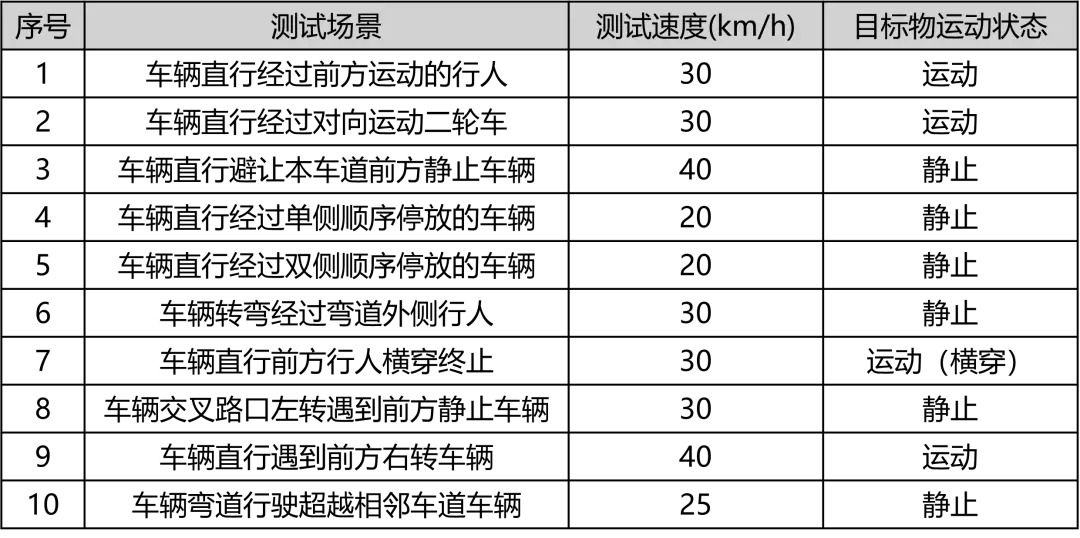
1 车辆直行经过前方运动的行人
该场景模拟了在公开道路或内部道路中,车辆缓速经过右侧行人的场景,重点考察车辆对右侧目标行人的横向距离测量能力。
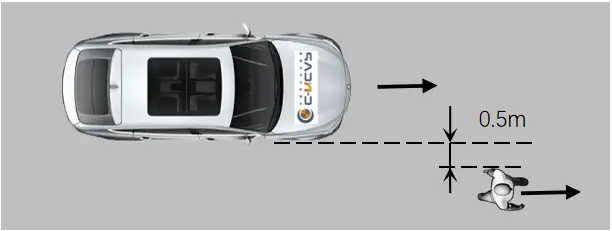
车辆直行经过前方运动的行人测试场景示意图
2 车辆直行经过对向运动的二轮车
该场景模拟了车辆缓速经过左侧对向行驶的二轮车的场景,重点考察车辆对左侧目标二轮车的横向距离测量能力。
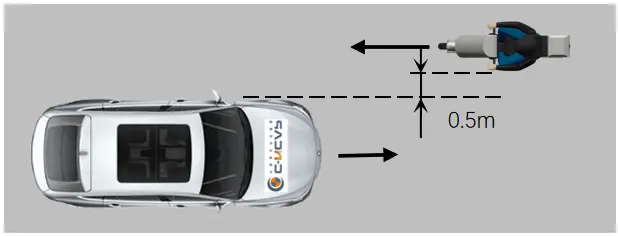
车辆直行经过对向运动的二轮车测试场景示意图
3 车辆直行避让本车道前方静止车辆
该场景模拟了驾驶员在遇到前方静止车辆后向左避让的场景,重点考察车辆对自车车身姿态和对目标车辆的横纵向距离探测能力。
车辆直行避让本车道前方静止车辆测试场景示意图
4 车辆直行经过单侧顺序停放的车辆
该场景模拟了在狭窄道路中车辆连续经过右侧静止车辆和行人的场景,重点考察车辆对右侧目标行人和车辆的横向距离测量能力。
车辆直行经过单侧顺序停放的车辆测试场景示意图
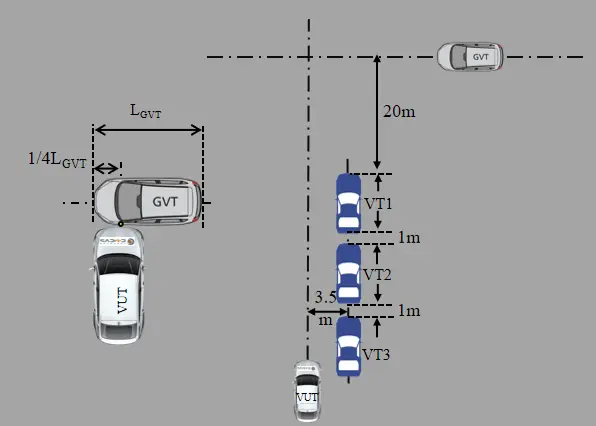
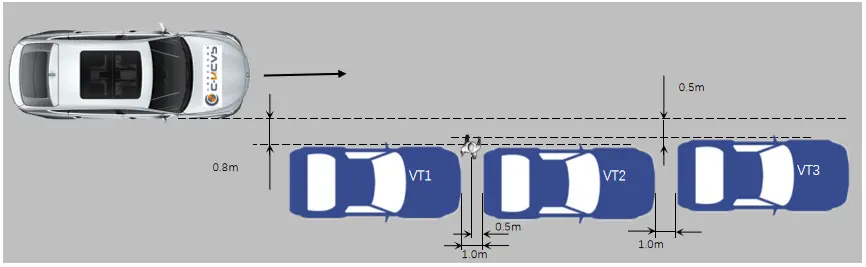
5 车辆直行经过双侧顺序停放的车辆
该场景模拟了在乡村道路或内部道路中车辆连续经过左右两侧静止车辆的场景,重点考察车辆对两侧目标车辆的横向距离测量能力。
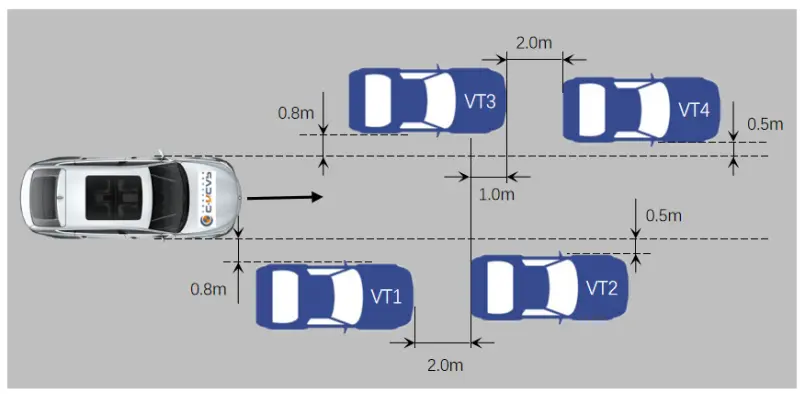
车辆直行经过双侧顺序停放的车辆测试场景示意图
6 车辆转弯经过弯道外侧行人
该场景模拟了车辆在转弯时遇到右侧静止行人的场景,该场景不仅考察车辆对行人的识别能力,也考察车辆对护栏的识别能力。
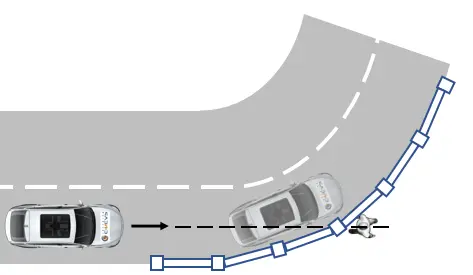
车辆转弯经过弯道外侧行人测试场景示意图
7 车辆直行前方行人横穿终止
该场景模拟了车辆在直行时遇到行人从右前方横穿并最终停止在护栏后方的场景,不仅考察车辆对右前方横穿行人的轨迹预测能力,也考察车辆对护栏的识别能力。

车辆直行前方行人横穿终止测试场景示意图
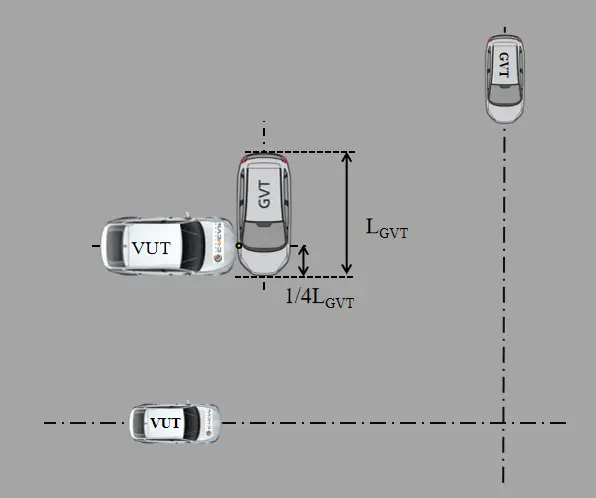
8 车辆交叉路口左转遇到前方静止车辆
该场景模拟了车辆在左转时遇到对向等待左转的车辆的场景,重点考察车辆对自车车身姿态和目标车辆的横纵向距离探测能力。
车辆交叉路口左转遇到前方静止车辆测试场景示意图
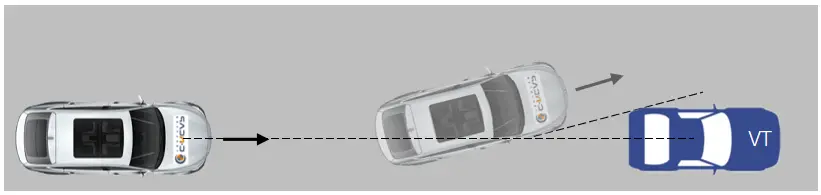
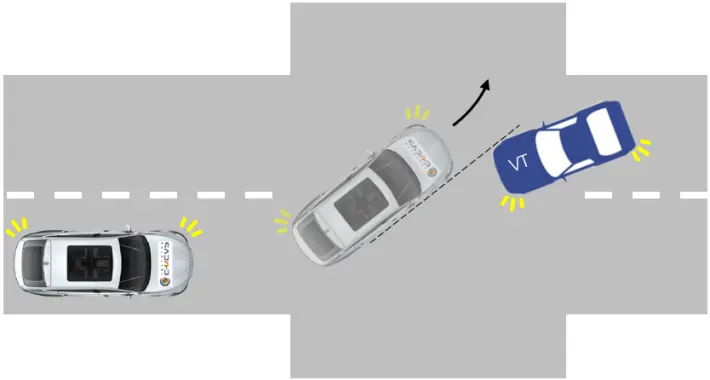
9 车辆直行遇到前方右转车辆
该场景模拟了车辆在直行过程中遇到右转减速车辆的场景,重点考察车辆对前方车辆的纵向距离测量能力和轨迹预测能力。
车辆直行遇到前方右转车辆测试场景示意图
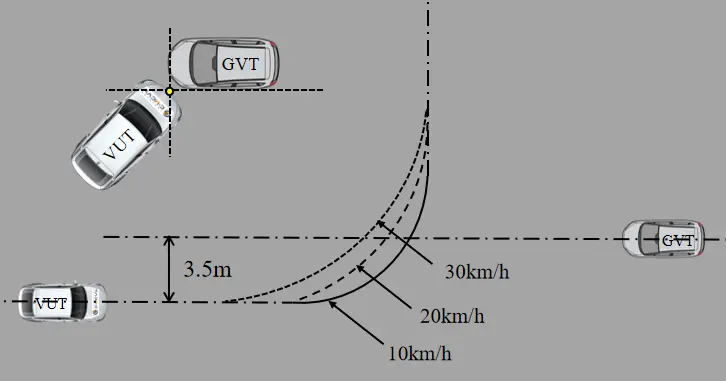
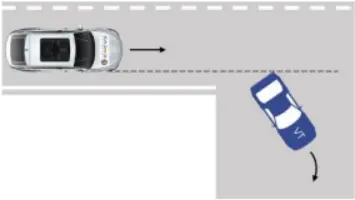
10 车辆弯道行驶超越相邻车道车辆
该场景模拟了车辆在左转过程中遇到右前方存在静止车辆的场景,重点考察车辆对前方车辆的横向和纵向距离测量能力。
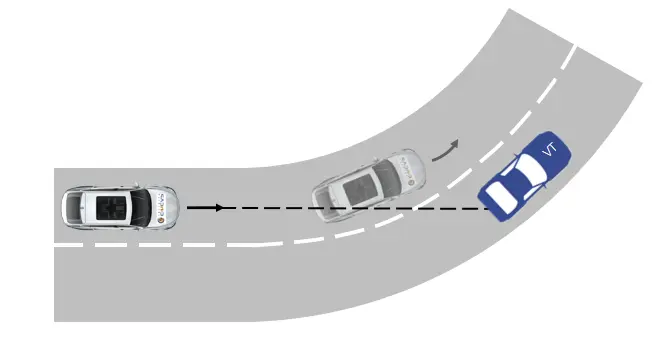
车辆直行遇到前方右转车辆测试场景示意图
03 车道辅助系统(LSS)测试
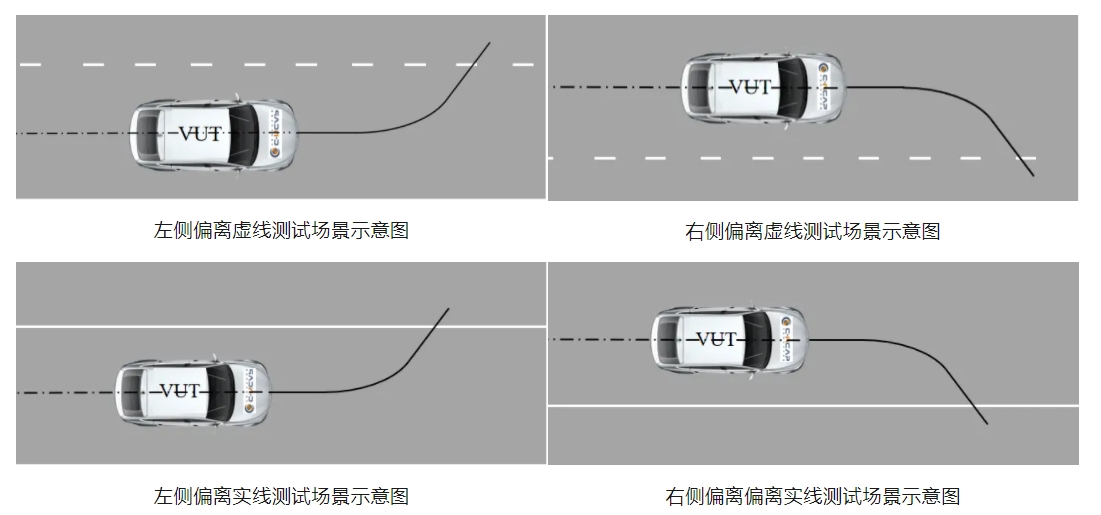
LSS测试包含车道保持辅助(LKA)和紧急车道保持(ELK)两类系统测试,其中LKA包含左右两侧、虚线实线共计4种工况,主要考察在高速场景下,车辆的LKA系统是否能及时将车辆纠回当前车道。
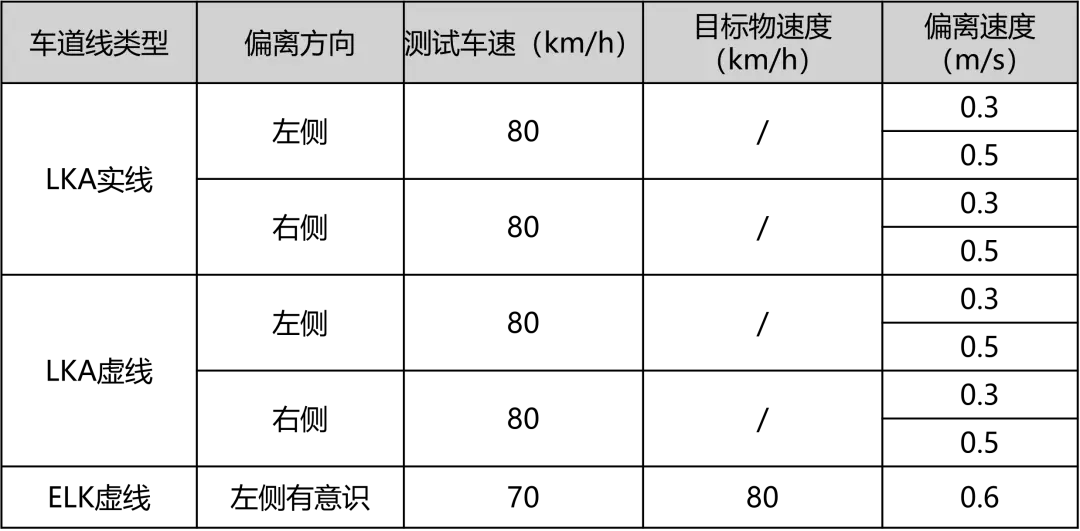
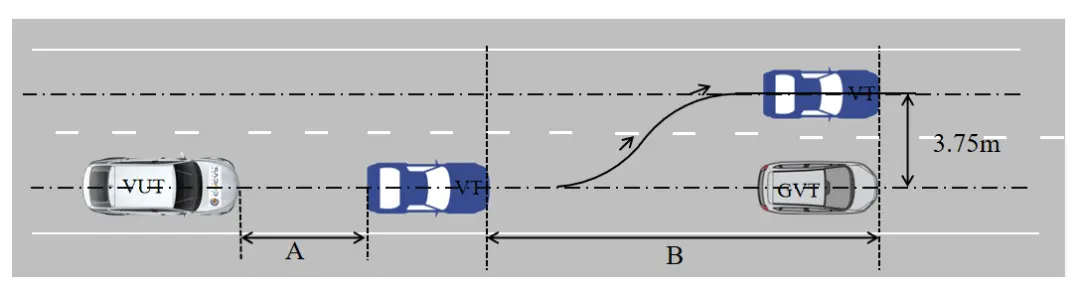
ELK主要考察在高速场景下,当驾驶员有意识向左变道且左后方存在正在超车的车辆时,ELK是否能及时将车辆纠回当前车道,从而避免碰撞。
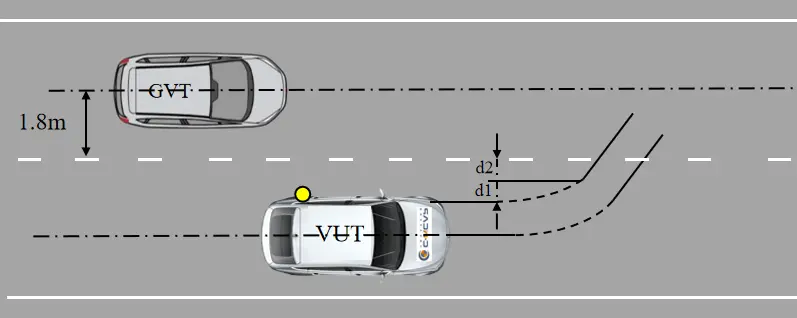
ELK车辆超车测试场景示意图
两类系统的测试速度较高,模拟了车辆在高速公路或快速路行驶的状态,符合真实的应用场景。
04 驾驶员监控系统(DMS)测试
DMS测试包括驾驶员疲劳监测(DFM)和驾驶员注意力监测(DAM)两大类测试,旨在检测当驾驶员因疲惫而闭眼或因分心而转移视线时,系统能否及时提示驾驶员,以减少交通事故发生的可能性。此外,每一项测试需要两位受试者参与,且他们的身高和眼睑缝隙需要分布在不同的区间内,这就保证了测试能够覆盖更广的范围。

驾驶员疲劳监测(DFM)测试场景
驾驶员注意力监测(DAM)测试场景
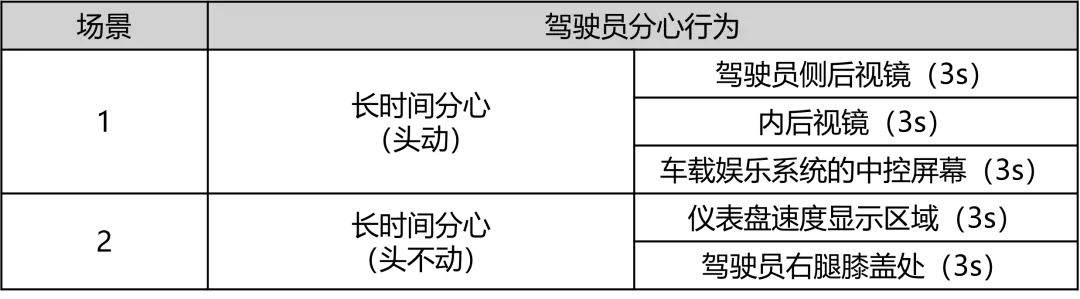
值得一提的是,DAM包含了驾驶员头动和头不动2种工况,头动的情况下,驾驶员应分别看向驾驶员侧后视镜、内后视镜和中控屏幕;头不动的情况下,驾驶员应分别看向仪表盘和右膝。上述场景真实地反映了驾驶员在驾驶过程中容易产生的分心行为,能够很好地检测DMS的性能。
周建华表示,C-NCAP 2024版实施后,将对车辆主动安全功能的研发、验证和测试等方面带来积极影响。
首先,车辆将具备更先进、更稳定和适用范围更广的主动安全功能。当危险场景出现时,主动安全系统能够先于驾驶员感知到目标物,并采取对应的动作,避免事故发生,对保护车内外人员安全具有重要意义。
其次,C-NCAP 2024相较于C-NCAP 2021,场景复杂度更高,评价维度更丰富,能够更加全面地评价车辆在各类危险场景下的性能表现,对消费者选车、购车具有更大的指导意义。
最后,C-NCAP 2024前瞻性地引入了C-V2X功能,为该功能日后的实际道路应用奠定了基础。
下一步,中汽研科技将持续开展对C-NCAP等关键测评规程的深入研究,为企业提供全面、专业、高效、可靠的测试服务,助力智能网联汽车产业高质量发展。
- 下一篇:运动摩托车的阻力优化
- 上一篇:【C-NCAP成绩发布】极越01







最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
