




 广告
广告





















































自动紧急制动系统升级为强标!各国AEBS法规盘点梳理

去年6月,全国汽车标准化技术委员会智能网联汽车分会启动申报了强制性法规《轻型汽车自动紧急制动系统技术要求及试验方法》,据悉,这项强标已于今年6月正式立项,制定周期为16个月,主要起草单位有中汽中心、中国一汽、华为等。
01 AEBS推标升强标

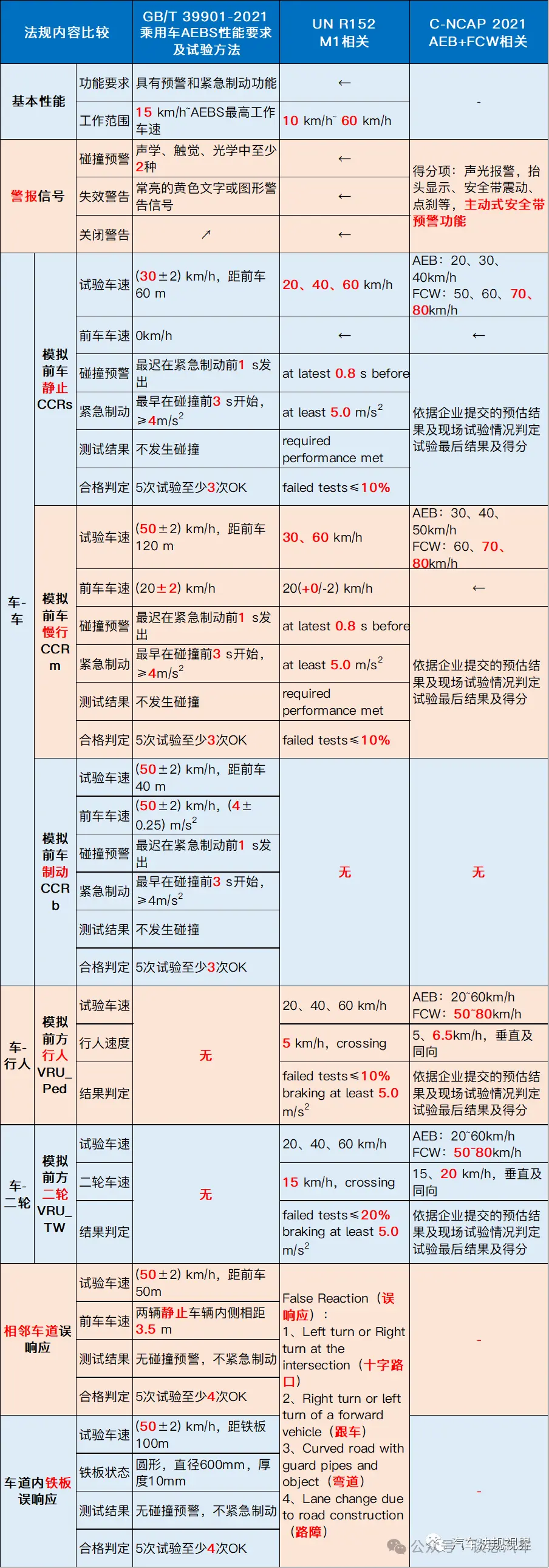
该强标基于推标GB/T39901-2021《乘用车自动紧急制动系统(AEBS)性能要求及试验方法》(推标完整PDF文件,见文末)修订,修订后主要有以下变动。
首先,标准适用范围增加N1类车辆,增加了系统对行人、二轮车等弱势交通参与者识别及响应能力考察;此外,还增加了系统性能鲁棒性的考察和丰富系统误作用的考核。
其次在主要技术内容方面,标准规定了轻型汽车自动紧急制动系统的性能要求和试验方法。主要包括自动紧急制动系统的自检、状态提示、预警信号、制动减速量、误响应、功能安全等,并给出相应的试验方法。
最后,对标国际AEBS的强制法规如ECE R152,该强标在技术要求上跟国际标准更加一致,从更多维度考察系统的性能。
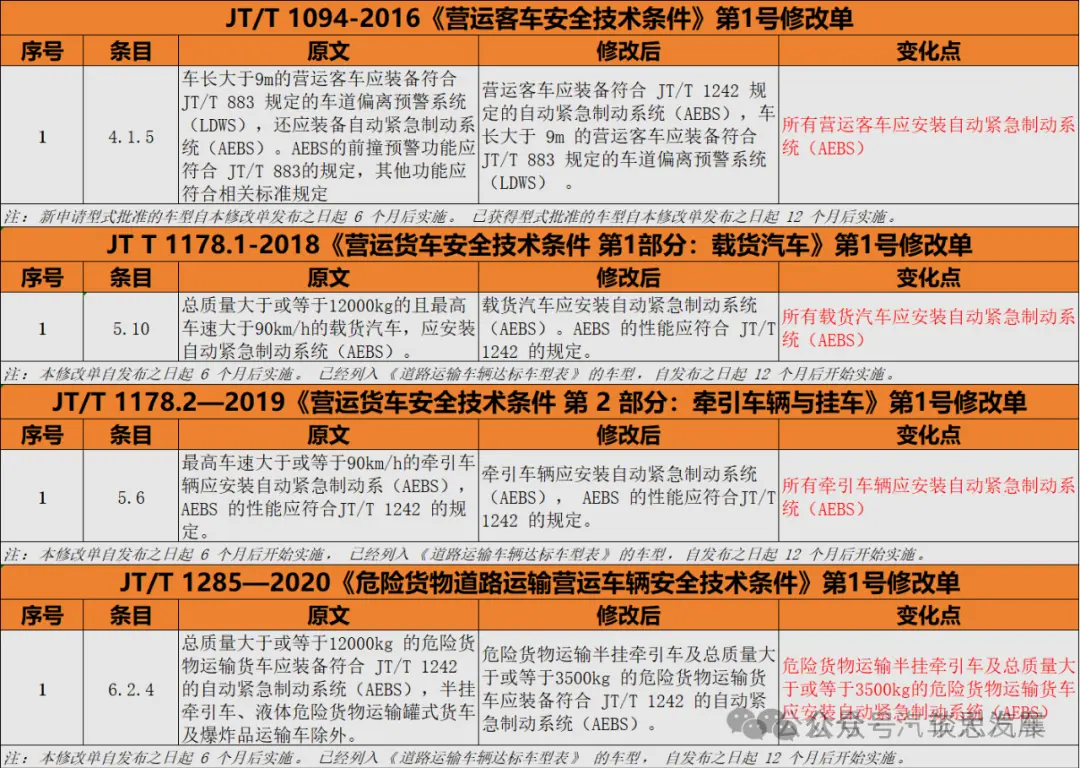
此外,需要关注的是,今年5月,交通部针对营运车辆的管理,连发四个标准1号修改单(征求意见稿)。直接要求营运客车、载货汽车、牵引车辆和危险货物道路运输营运车辆均需装配自动紧急制动系统(AEBS),并满足相关技术要求。
汽车大发展整理
所以,AEBS到底有多重要,会让国家管理部门连续出台标准政策呢?
02 为什么AEBS这么重要
世界卫生组织的数据显示,全球每年约有135万人死于交通事故,数百万人受伤。而造成这些交通事故的原因中,80%以上源于驾驶员的疏忽大意和反应迟缓。
奔驰汽车公司和美国Eaton公司通过对各类交通事故进行研究后表明,如果驾驶员相比发生事故时可以提前1-2 s意识到碰撞危险并采取避撞措施,则可以避免绝大部分交通事故。于是,便有了自动紧急制动系统(Advanced Emergency Braking System,AEBS)。
AEBS是一种通过自动制动来避免或者缓解碰撞的主动安全技术,属于先进驾驶辅助系统(advanced driver assistance system,ADAS)的范畴。在众多ADAS系统中,AEBS因其在提高行车安全性和减少交通事故中的重要作用而备受瞩目。

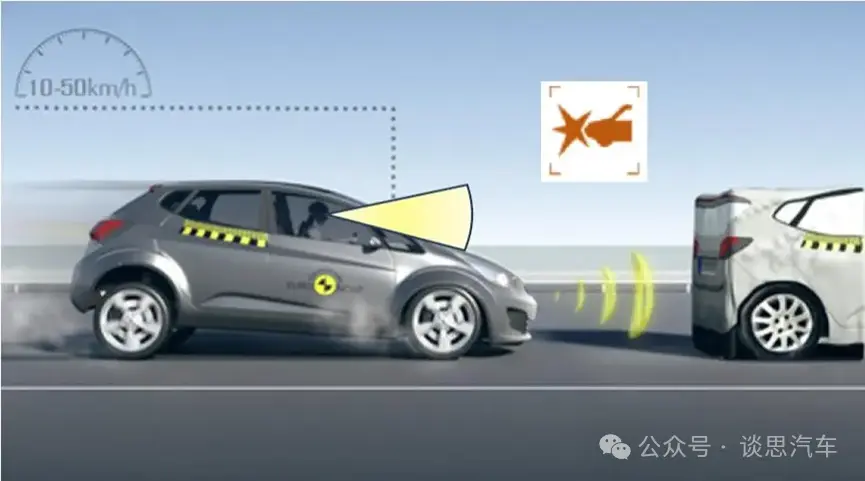
AEBS系统通过摄像头或雷达检测和识别前方车辆,在有碰撞可能的情况下先用声音和警示灯提醒驾驶者进行制动操作回避碰撞。若驾驶者仍无制动操作,系统判断已无法避免追尾碰撞,就会采取自动制动措施来减轻或避免碰撞。
同时,该技术还包括动态制动支持,当驾驶者踩下制动踏板的力量不足以避免即将到来的碰撞时,就会为其补充制动力。
根据路况的差异,AEBS可分为用于城市路况的城市AEBS、用于高速公路路况的城际AEBS以及用于保护行人的行人AEBS。
城市AEBS主要利用激光雷达来探测前方10 m内的目标车辆,在车速不超过20 km/h情况下工作;城际AEBS主要利用毫米波雷达等远距离雷达来探测前方100 m内的目标车辆,在车速介于50到80 km/h情况下工作;行人AEBS主要利用摄像头、红外装置等来探测目标行人。
03 常见的AEBS避撞策略
①基于行车间距的安全距离避撞策略
指尽可能避免与前方车辆发生碰撞所要保持的安全距离,从距离尺度将自车与前车的实时车间距作为衡量行车危险状态的指标,并与策略中预警安全距离与紧急制动安全距离进行比较判断,从而指导AEBS系统做出预警和主动制动的避撞操作。
而策略中,预警安全距离与紧急制动安全距离主要由自车车速、与目标车的相对车速、自车最大制动减速度、目标车最大制动减速度、系统延迟时间、驾驶员反应时间、车辆停止后需要保持的车间距等参数实时确定。
早在20世纪末,马自达公司、本田公司、美国高速公路安全管理局为尽早开发出AEBS系统,分别提出了Mazda、Honda、NHTSA等经典安全距离避撞策略。

②基于驾驶员反应特性的碰撞发生时间避撞策略
指在符合驾驶员对行车危险情况下的认知和判断条件下,从时间尺度将自车当前运动状态到与前车发生碰撞所剩余的碰撞发生时间(time to collision,TTC)作为衡量行车危险状态的指标。
策略将前端雷达获取到的实际车间距与相对车速相除得到实时TTC值,并与系统中所设定的碰撞预警的TTC值和紧急制动的TTC值进行比较判断,从而指导AEB系统做出预警和主动制动的避撞操作。国内外汽车厂商及高校针对碰撞发生时间避撞策略展开了大量的理论和实践研究,并应用到AEB系统避撞策略中。
③制动转向协同避撞策略
指通过纵向的AEBS以及横向的主动转向系统协同工作,来实现对前方目标的完全避撞,主要用于应对AEBS系统无法通过纯粹纵向制动对前方目标实现高车速和低车距的完全避撞。
例如车辆前方突然出现行人横穿马路而导致实时TTC瞬间变化并小于紧急制动TTC,此时即使AEBS充分发挥作用,车辆仍然会以较高的车速与行人发生碰撞。协同避撞策略中,AEBS系统仍需要为整个避撞阶段的主动制动以及主动转向过程制动控制提供支持,对系统避撞策略提出了更高的要求。
04 现有的AEBS相关法规或标准
为了对AEBS的性能进行系统的测试及评价,使系统适用于多种驾驶环境下,各国及地区相继制定了针对AEBS技术相关的法规或标准,如欧盟实施已久的UN R152、我国现行的推标GB∕T 39323、美国新发布的FMVSS 127法规……
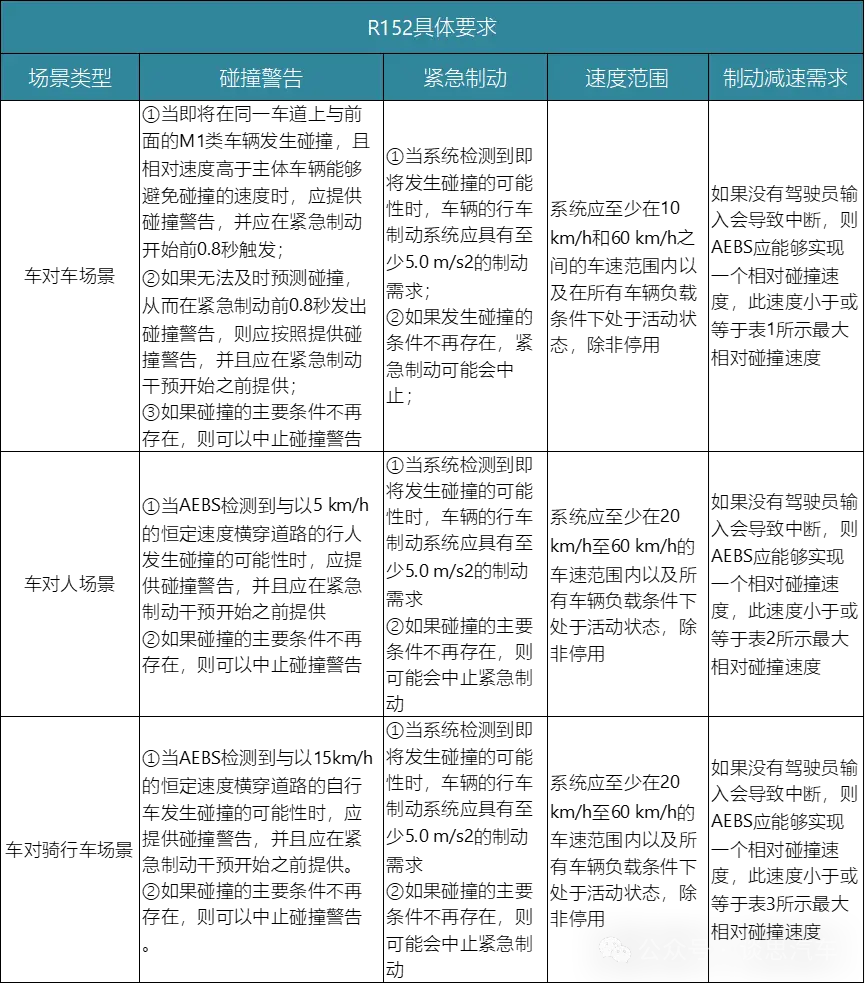
UN R152《关于M1和N1型机动车高级紧急制动系统(AEBS)型式认证的统一规定》是联合国对于M1和N1型车辆AEBS系统认证的要求说明,当满足其要求内容时,才可通过联合国的认证进入欧盟市场。
谈思汽车整理

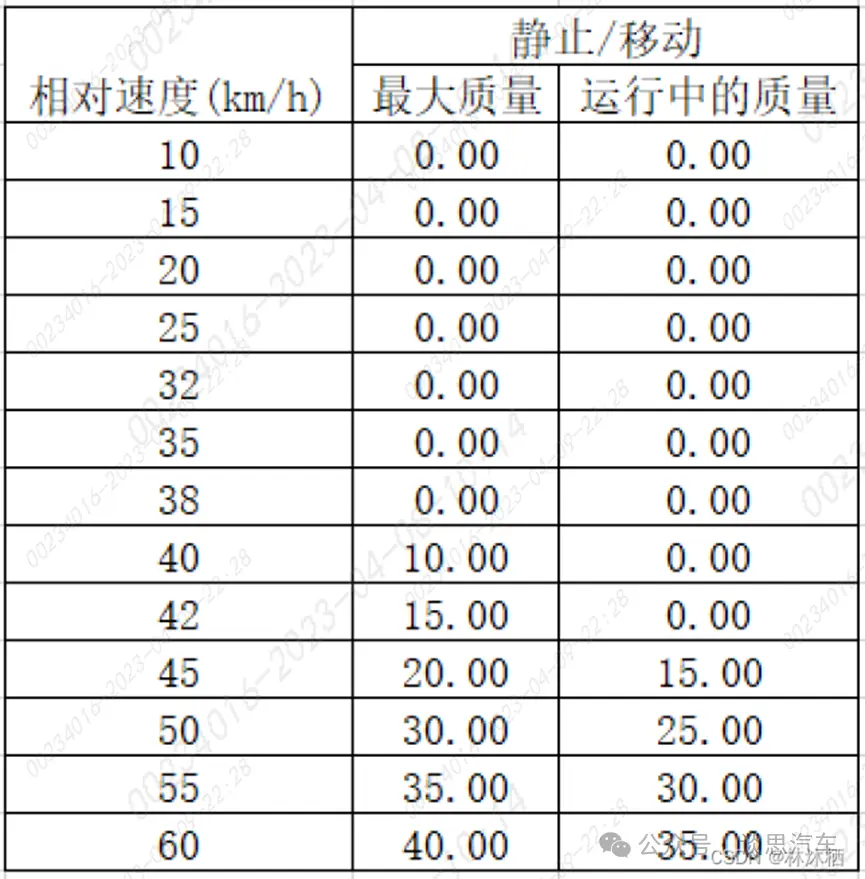
表1:车对车场景
左为M1车辆的最大相对碰撞速度(km/h)
右为 N1车辆的最大相对碰撞速度(km/h)
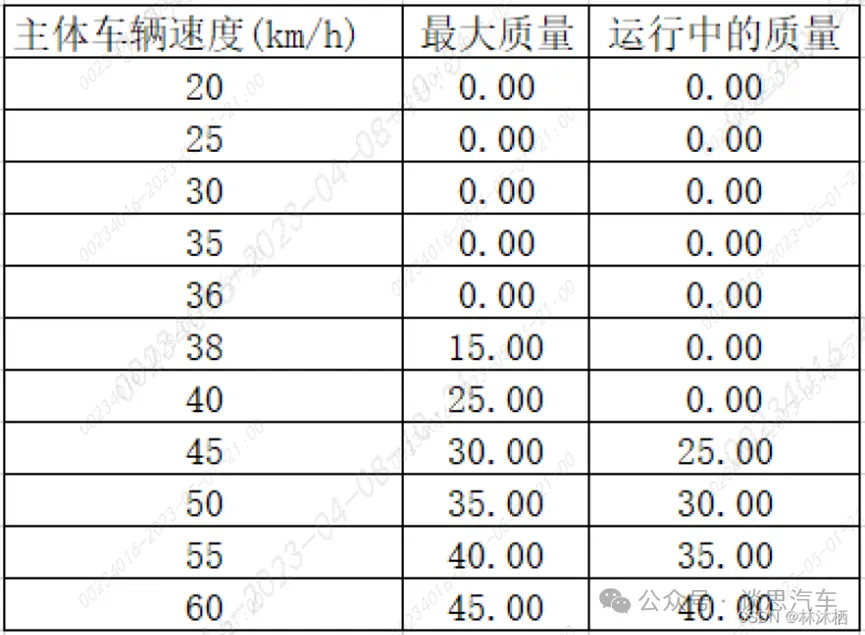
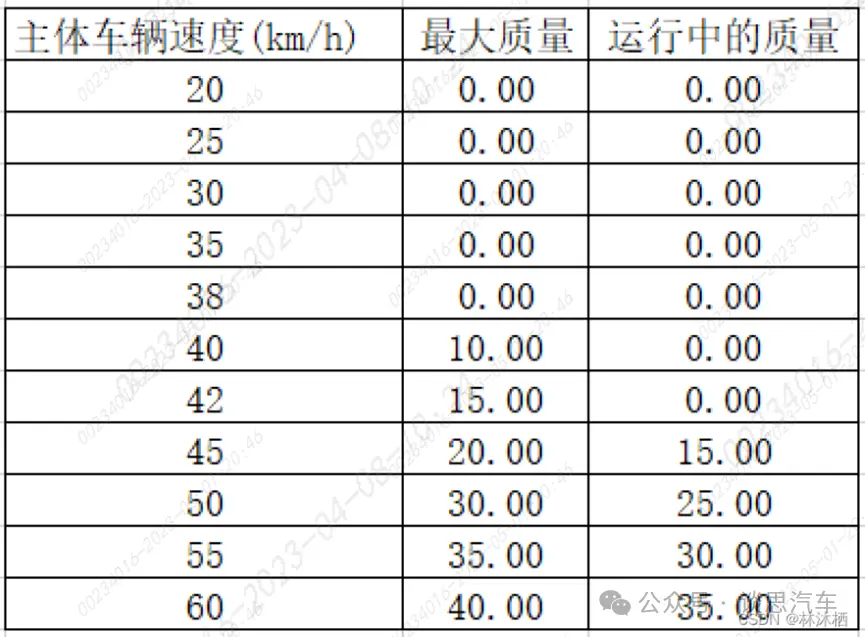
表2:车对人场景
左为M1车辆的最大碰撞速度(km/h)
右为N1车辆的最大碰撞速度(km/h)
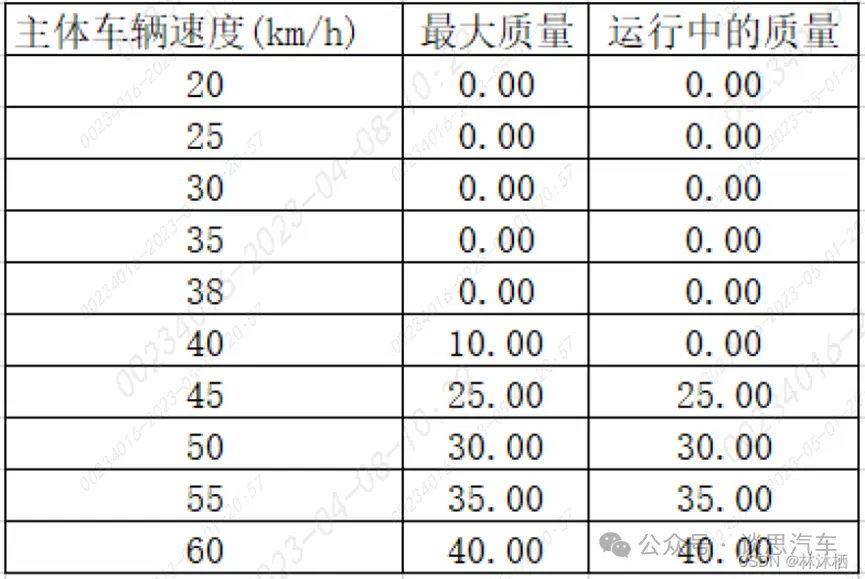
表3:车对骑行车场景
左为M1车辆的最大碰撞速度(km/h)
右为N1车辆的最大碰撞速度(km/h)
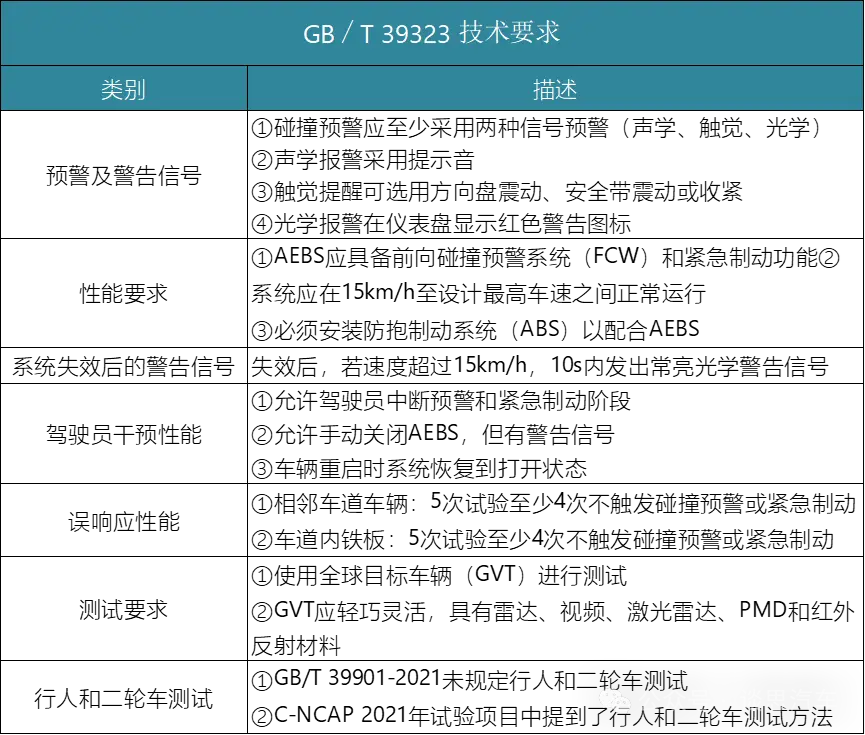
GB∕T 39323 《乘用车车道保持辅助(LKA)系统性能要求及试验方法》是于2021年10月开始实施的一项推标,标准从预警及警告信号、性能要求、系统失效后的警告信号、驾驶员干预性能、误响应性能等几个方面做了规定。
谈思汽车整理
FMVSS 127 Automatic emergency braking systems for light vehicles:今年5月9日,由美国国家公路交通安全管理局(NHTSA)正式发布,并规定自2029年9月1日起,新生产的轻型车应满足FMVSS 127的要求。
相较于实施多年的R152,该法规在人机交互(HMI)方面迈出了全新一步,要求AEBS系统在靠近危急情况的方位上发出FCW警示信号,这将使驾驶员在观察视觉警示信号的同时也能兼顾到对当前情况的了解。
法规还进一步规范了警示信号的表现形式,对于视觉信号,法规要求使用SAE J2400中的标准符号,保证驾驶员能够快速的理解警示信号所传递的信息。
除了上述法规,下面这些标准办法中也对AEBS提出了相应的技术要求:
-
C-NCAP 2021版 《中国新车评价规程》引入AEBS车对车和AEBS车对行人两项评价,系统提出了对AEBS行人系统的测试方案和评价标准;
-
GB∕T 39265 《道路车辆 盲区监测(BSD)系统性能要求及试验方法》适用于安装有盲区监测系统的M和N类车辆。;
-
《i-VISTA中国智能汽车指数管理办法(2020版)》及测评规程,增加了行人和骑行者AEB测试内容,包含了能反映中国交通特点的试验场景;
-
E-NCAP 2020版《欧洲新车评价规程》在2014年将AEBS纳入新车主动安全的评价规程,将测试场景分为车追尾静止车、车追尾运动车、车追尾制动车三大类。
中欧AEBS法规比较
汽车法规视界整理
05 总结
AEBS虽然可以大幅提升行车安全性,但并不代表车辆配备了该功能就能100%避免碰撞事故的发生,其本质上只是一种辅助驾驶系统,且受到目前硬件和软件的限制,识别尚存在一定局限,如传感器存在明显的速度上限和下限、对行人的探测需要较长时间、对突然出现的静止物体无法及时识别以及受天气环境影响等。
此外,人为操作的错误、软件漏洞和系统集成问题也可能对AEBS的性能产生负面影响。因此,AEBS仍需要技术上的提升和更加优化的解决方案。
- 下一篇:汽车底盘件:车辆性能与安全的基础
- 上一篇:采埃孚新型安全防御措施



编辑推荐



最新资讯
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
-
迄今为止最先进的版本:imc发布全新imc STU
2025-04-23 17:06
-
艾德克斯上海慕尼黑电子展圆满收官,展示测
2025-04-23 17:03
-
本田下一代燃料电池首次亮相北美
2025-04-23 16:49
