




 广告
广告





















































自动驾驶合规宝典9~交通场景与性能指标

1.交通场景识别
2.基于交通规则的性能指标
3.基于安全模型的性能指标
1.交通场景识别
为了确保ADS的行为能力可以通过仿真或物理测试进行评估,必须开发与ODD相关的交通场景。交通场景的创建涉及道路使用者行为的假设,其中包含具体参数。
有两种互补的方法可以推导可能发生在给定ODD中的合理预期场景。分别是基于知识(例如基于目标)、基于数据。
知识驱动的场景生成方法:利用领域(或专家)特定知识系统地识别危险事件并创建交通场景。
数据驱动的场景生成方法:利用可用数据(例如事故数据库、保险记录)来识别和分类事故发生的场景。
下图说明了各种基于数据和知识的场景生成方法:
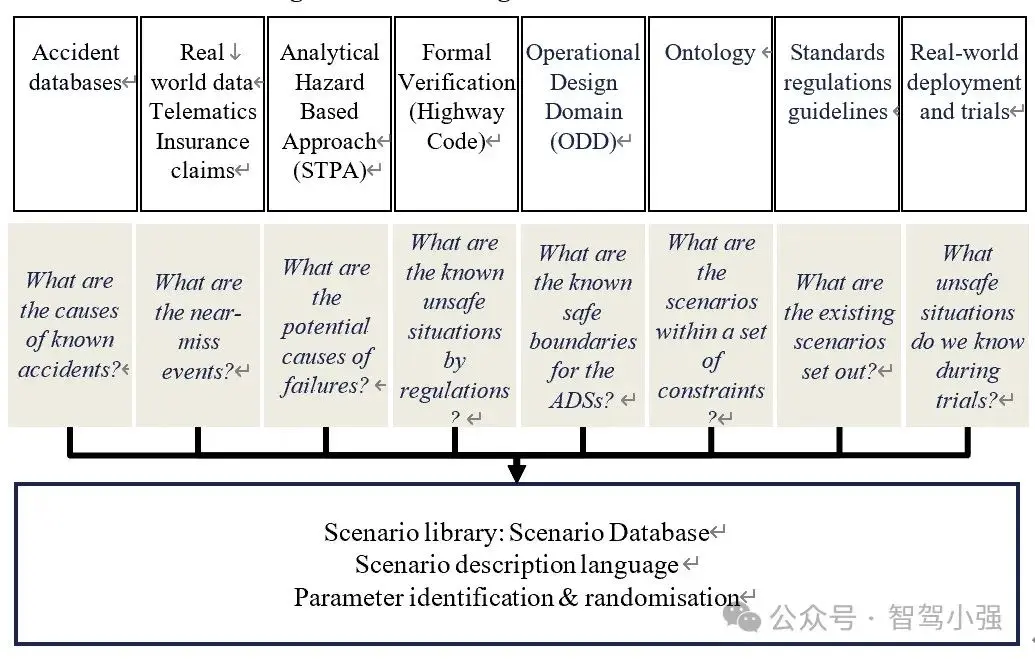
基于事故数据集和现场数据,可以确定事故热点和场景参数,这些参数有助于了解造成严重事故的原因。
基于知识的方法或其他形式的技术可用于分析ADS控制结构和控制行为,并识别ADS系统故障和危险情况(SAE J3187)。然后,分析被转换为一组抽象场景或逻辑场景及其相应的通过/失败标准。
其他基于知识的方法包括:使用ODD和ADS的行为能力进行场景生成的方法;使用高速公路规则进行场景生成的方法等。每个高速公路规则都描述了一个具有相应行为和ODD元素的假设驾驶场景。ODD是ADS制造商制定的规范,它定义了ADS可以安全运行的操作条件。通过模型模板生成正式模型,以创建这些场景的数学表示,收集ODD和行为参数的组合。还可以通过分析违反道路交通安全法的行为参数,并生成代表这些违规集的场景。

此外,各个国家\地区\组织等发布的标准、法规或指南中已经定义的现有场景也可用于ADS的测试,例如ISO 22737《智能交通系统——用于预定义路线的低速自动驾驶(LSAD)系统——性能要求、系统要求和性能测试程序》和新车评估体系NCAP(New Car Assessment Program)中列出的场景。
ISO 22737由ISO/TC 204智能运输系统技术委员会归口,并于2021年7月6日发布。该标准适用于在预定路线上运行的低速自动驾驶(LSAD)系统的安全操作。LSAD系统设计为在特定运行设计域(ODD)内以L4级自动驾驶方式运行,适用于自动驾驶系统专用车辆(ADS-DVs),也可用于双模车辆。
ISO 22737为低速自动驾驶系统的开发、测试和验证提供了全面的指导,通过规定系统的性能要求和测试程序,确保低速自动驾驶系统在实际应用中具备较高的安全性和可靠性。
NCAP是一个国际性的汽车安全性能测试和评级系统。它的主要目的是通过模拟真实交通事故的碰撞测试来评估新车在碰撞中的主被动安全性能,并向公众提供这些信息,以帮助消费者做出更明智的购车决策。
还应收集全球各个地区在实际测试试验和ADS运营中发生的场景。ADS车辆要运营的区域可能不会遇到这些场景,但它们是重要的学习资料。
关于其他道路使用者行为的假设需要考虑到不同地理位置驾驶风格的文化差异,因此在不同地区协调这些假设是不切实际的,制造商应提供证据来支持场景搭建中所做的假设。现有标准,例如IEEE 2846-2022《安全相关自动车辆行为模型假设》提供了一组假设,供ADS安全相关模型参考。
此外,还有其他几种工具,包括开发阶段执行的数据采集活动、现实世界的事故分析和现实驾驶行为评估、约束随机化、贝叶斯优化等可为此类假设的值提供信息。
正常交通场景下ADS的性能指标之一是遵守道路交通规则。此外,ADS安全要求也规定“ADS应根据运营区域内相关法律的要求遵守交通规则” 但是,并不是所有的交通场景都有对应的交通规则文本(明确要求),根据交通规则进行测试是具有挑战的。
前文提供了一个方法:用于ADS的道路交通规则编码。这种方法可用于定义什么是ADS的“良好行为”(严格遵守交通规则),为正常交通场景的测试和验证过程提供了信息。
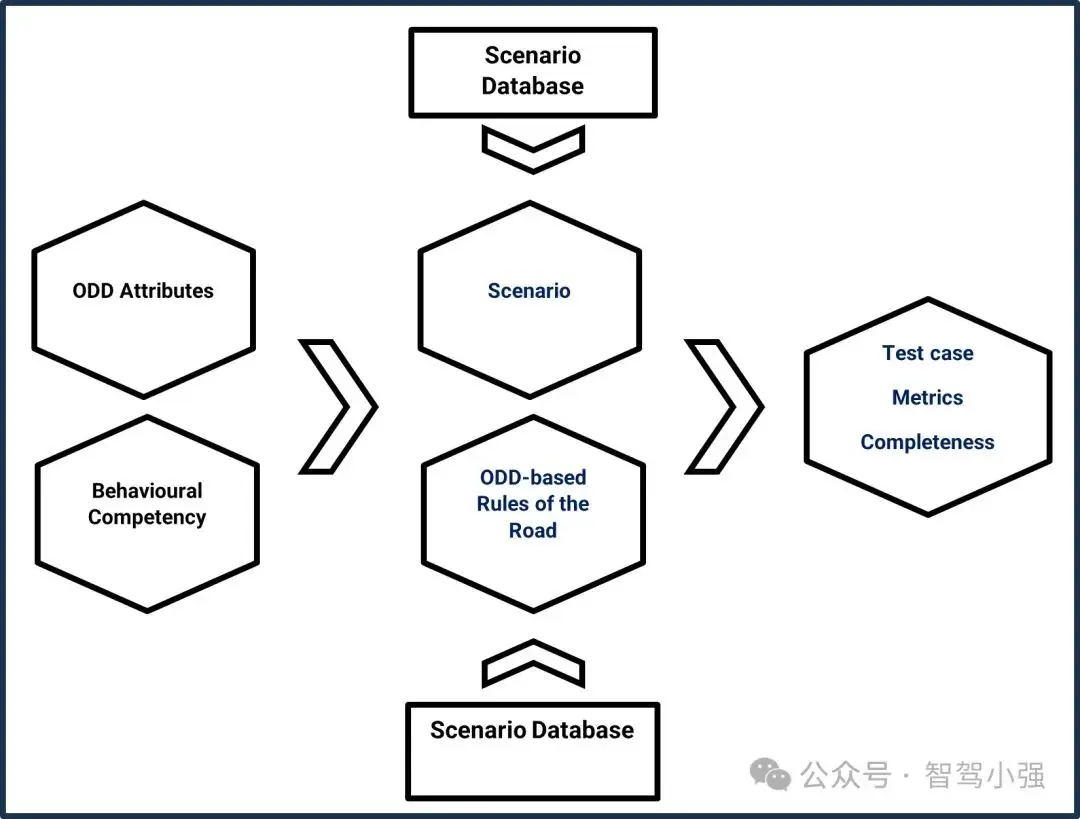
下图展示了使用代码化的交通规则作为基于场景的测试活动的通过标准。每个测试场景定义都需定义ODD和行为能力属性,每个交通规则也需有ODD和行为能力属性作为其定义的一部分。因此,可以使用ODD和场景目录中的行为标签将每个场景映射到相应的道路规则。
交通规则作为通过/失败标准。
3. 基于安全模型的性能指标
一个重要的问题是:在多大程度上,以及在什么情况下可以避免碰撞?在为自动驾驶系统制定具体的新法规(UN法规和/或全球技术法规)时,必须回答这个问题。
为此,需要引入简单的逻辑模型,即所谓的安全模型。安全模型提供了如何处理其他交通参与者的交通规则违规和不当行为的假设,并使用物理特性和基本驾驶动力学来进一步详细说明事故避免条件。

本章节的目的是:确定如何制定ADS法规要求的具体性能标准的过程。
本章节中描述的安全模型集应被视为一组工具,而选择正确的工具(正确的安全模型)取决于边界条件,这应该是致力于编写具体法规要求的人员的任务。因此,在本章节中,不存在对任何安全模型的偏好。
需要考虑的两个要点:安全模型是推导阈值向量的方法论,用于区分必须避免的碰撞和只需要缓解的碰撞。目标不是规定ADS在任何给定的紧急情况下的特定行为,这只是关于预期结果。然而,选择的安全模型需要适应真实测试用例,例如,不能为没有第二条车道的场景选择绕路模型。
在数学和逻辑意义上,对于任何给定的场景,都会有一个函数提供布尔值“真”或“假”来判断是否需要避免碰撞(这取决于部分描述场景的变量);反之亦然,都会有一个函数提供布尔值“真”或“假”来判断缓解是否可接受。







最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
