




 广告
广告





















































紧急车道保持,抑制车辆“出轨”的中西法规大对比

紧急车道保持,抑制车辆“出轨”的中西法规大对比
人类驾驶员在开车过程中,或多或少都会遇到一些场景,导致车辆偏离正常行驶的车道:
(1)驾驶员长时间驾驶产生疲劳或接打电话分心导致车辆偏离行驶车道。
(2)在连续弯道行驶或大曲率半径行驶或过弯速度不合适导致车辆偏离行驶车道。
(3)新手驾驶员对横向距离掌控不好导致车辆偏离车道。
车辆在驾驶员无意下偏离车道带来的危害显而易见,而随着车辆智能化水平的提高,采用先进感知和控制技术对车辆在驾驶员无意下偏离进行纠偏具有了技术可行性。有鉴于此,国内外标准组织陆续制定颁布了一些法规标准。
法规标准走在前列的当属欧盟,其在最新汽车通用安全法规(EU)2019/2044(GSR II)中规定,自2022年7月6日起,所以新M1、N1类车辆在申请型式认证时,必须要安装符合Reg.(EU)2019/2044定义的紧急车道保持系统(Emergency Lane-Keeping System,ELKS)。而在这之前已经拿到型式认证,但没有安装ELKS的车辆,可以继续卖到2024年7月6号,而在这之后,所有要在欧盟上牌照的新车,均必须安装有ELKS。
除了欧盟,国际标准化组织(ISO)也有一份与紧急车道保持相关的标准ISO 19638-2018,在此份标准中该功能被称为道路边界偏离抑制系统(Road boundary Departure Prevention Systems,RBDPS)。而在国内也有两份与之相关的国家推荐标准,一份是适用乘用车车道保持辅助(Lane Departure Assist,LKA)的GBT 39323-2020,一份是适用商用车LKA的GBT 41796-2022。
除了法规标准,一些地区的新车评价规程也引入了对紧急车道保持功能相关的评价,比如欧盟的Euro NCAP及国内的C-NCAP。
本文通过对法规标准,新车评价规程进行简单解读,来科普这个实用的主动安全功能。
01 Reg.(EU)2019/204 ELKS
Reg.(EU)2019/2044对ELKS定义:是一个仅当驾驶员驾驶车辆无意偏离车道时,向其发生警告,并通过控制转向系统或制动系统来修正偏离的驾驶辅助系统。从定义我们能够知道ELKS是一个可以短暂介入横向控制的驾驶辅助功能,介入方式既可以选择控制转向系统,也可以选择ESC控制制动系统。
一个完整的ELKS包含两个子系统,一个是车道偏离预警系统(Lane Departure Warning System,LDWS),一个是方向纠正功能(Corrective Direction Control Function,CDCF)。这也比较符合驾驶辅助逻辑,系统检测到车辆发生偏离后先是对驾驶员进行提醒,提醒之后车辆还在偏离后进行纠正。
ELKS是一个每次车辆上电都会自动开启的功能,开启后支持手动关闭或自动关闭。
为了防止误操作,手动关闭需要驾驶员2个有意的动作,比如按下一个开关超过一定时间,比如通过软开关关闭时弹出一个确认关闭的弹窗……
自动关闭适用一些特殊场景,比如在没有道路标线的泥路上行驶、比如正在被其他车牵引、比如车子后面挂了挂车、比如车辆ESC被关闭或故障等。这些自动关闭的场景制造商可以自己定义,但是需要提供文档详细罗列出这些特殊场景及判断逻辑。当定义的特殊场景消失后,ELKS还能够自动打开。因为自动关闭时,这个时候驾驶员可能并不知道ELKS已经关闭,所以自动关闭后还需要通过一个光学信号来对驾驶员进行提醒,而人工关闭时则没有强制要求。
除了可以自动关闭,ELKS还支持自动抑制。所谓自动抑制是指当系统检测到车道偏离时驾驶员的有意为之或其他转向辅助系统或安全系统正在介入工作,ELKS这个低优先级的晚辈就往后站一站。驾驶员有意的车道偏离行为包括打转向灯变道、偏离时方向盘转矩大于阈值等,其他转向辅助系统介入包括ACSF、ESF、ALKS等,其他安全系统包括AEB、ESC等。针对自动抑制策略,制造商需要提供文档详细说明自动抑制策略。
一、LDWS
LDWS在判断车辆发生偏离且以下条件满足时发出偏离报警,偏离报警最迟要在DTLM<-0.3m前发出(DTLM,Distance to Lane Marking,车轮最外侧边沿距道路边界内侧边之间的距离,车轮未超过道路边界内侧为正,超过为负):
(1)自车车速:65~130km/h,当车辆最高设计车速低于130km/h时,以车辆最高设计车速为准。
(2)车辆横向偏离速度:0.1~0.5m/s。
(3)车道线类型:实线或虚线。
(4)车道线质量:清晰可见。
(5)道路要求:平坦干燥的直道。
(6)光照要求:不会导致传感器致盲的任意光照条件,允许开近光灯。
(7)天气要求:不影响车道线识别的天气。
LDWS触发后可以采用两种报警方式,第一种是用视觉、听觉、触觉方式中的两种;第二种是用听觉或触觉中的一种,但需要配合专门的指示表明车辆偏离的方向。LDWS触发报警后,如果驾驶员感觉厌烦或没有必要,可以通过有意的动作解除,但下次发生偏离时,报警还是会继续发出。如果LDWS触发时,下文要介绍的CDCF功能正在介入,则LDWS报警方式应考虑采用触觉的方式。
二、CDCF
CDCF判断以下条件满足时,要能够在车辆发生偏离时介入车辆的横向控制,从而保证DTLM<-0.3m:
(1)自车车速:70~130km/h,CDCF因车速原因退出时需要加一个回滞5km/h,这意味着一旦CDCF激活,只有车速低于65km/h时,才允许退出。
(2)车辆横向偏离速度:车速<100km/h时0.2~0.5m/s,车速>100km/h时0.2~0.3m/s。
(3)车道线类型:实线,注意虚线不会触发CDCF。
(4)车道线质量:清晰可见。
(5)道路要求:平坦干燥的直道。
(6)光照要求:不会导致传感器致盲的任意光照条件,允许开近光灯。
(7)天气要求:不影响车道线识别以及车辆动力学性能的天气。
CDCF激活后,如果具有最高优先级的驾驶员反应过来,想要进行接管,也是允许的,CDCF允许驾驶员接管转向力矩不能超过50Nm。驾驶员开始接管后,CDCF退出时也不能有明显的阻力下降,否则会给驾驶员一种转向不平顺的感觉。如果CDCF激活不是控制转向系统,而是通过类似ESC制动单侧车轮来实现纠偏,那么CDCF允许驾驶员接管的转向角不能超过25°。
CDCF激活后,应通过视觉信号对驾驶员进行报警,持续到退出。若激活时间不足1s,视觉报警也要持续至少1s。如果CDCF介入超过10s,应同步开始提供声音报警,直到CDCF退出。如果180s内CDCF多次激活,且驾驶员始终没有对方向盘进行控制,从第二次CDCF激活开始,每次都要同时提供声音报警,从第三次激活开始,每一次都比前一次多10s。
02 ISO 19368-2018 RBDPS
ISO 关于车道保持辅助功能相关的标准有三份:一份是ISO 17361-2007,与车道偏离预警系统LDWS相关;一份是ISO-19638-2018,与道路边界偏离抑制系统RBDPS相关;一份是11270-2014,与车道保持辅助系统(Lane Keeping Assistance System,LKAS)相关。下面我们仅介绍与紧急车道保持关联最密切的ISO-19638-2018 RBDPS。
RBDPS本质上和上面章节介绍CDCF一样,都是在车辆已经发生车道偏离或即将发生车道偏离时,通过一些控制策略来纠正车辆。不同的是,CDCF的控制策略是通过介入转向系统或/和制动系统来产生纠正的横摆力矩。而RBDPS除了上述控制策略,还要求能够通过制动系统或发动机制动(或新能源的能量回收)来降低车辆速度。此处我的理解是:降低车辆速度可以降低偏离速度,一边转向,一边减速,有助于更快速地纠正车辆。
RBDPS判断以下条件满足时,要能够在车辆已经发生偏离或即将发生偏离时介入车辆的横向控制,从而保证车轮外侧边沿距道路边界内侧边之间的距离不超过要求值,为了方便比较,我们将RBDPS激活时偏离车道的阈值转换成DTLM要求,见表1。
表1 RBDPS激活DTLM要求

(1)自车车速:不同车辆类型的激活速度要求见表23。
表2 不同车辆类型RBDPS激活速度要求

(2)车道线类型:实线。
(3)车道线质量:清晰可见。
(4)道路要求:国道及高速公路。
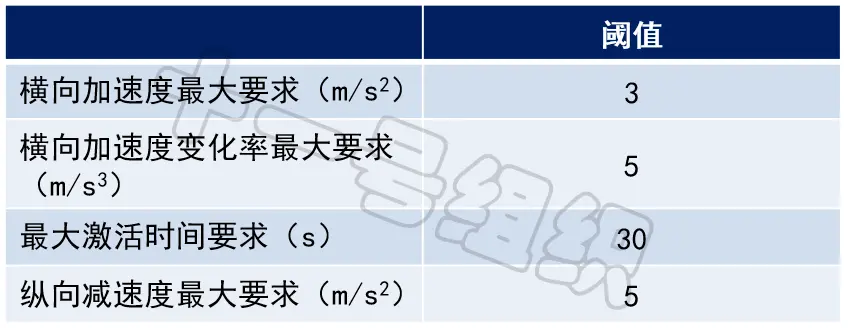
RBDPS激活后,对产生的横向加速度和纵向减速度都提出了最小要求,见表3。同时为了保证安全性,RBDPS对激活后产生的横向加速度最大值、0.5s内的横向加速度变化率最大值、最长激活时间、横向最大加速度都作了要求,见表4。
表3 不同车辆类型RBDPS激活横向加速度和纵向减速度最小要求

表4 部分性能最大要求
RBDPS激活后也支持自动抑制,标准里给出的抑制参考方式包括:转动方向盘、踩制动踏板、踩油门踏板,具体阈值由厂家决定。
标准最后,给出了三份标准的核心差异,见表5。
表5 LDWS、LKAS和RBDPS核心差异

03 GBT 41796-2020和GBT 41796-2022 LKA
GBT 39323-2020是2021年6月实施的一份针对乘用车(M1)车道保持辅助(Lane Departure Assist,LKA)功能的推荐性国家标准。该标准定义LKA应至少包含车道偏离抑制(Lane Departure Prevention,LDP)或车道居中控制(Lane Centering Control,LCC)LCC功能之一。
LDP和前文介绍的CDCF作用相似,都是在必要情况下控制车辆横向运动,使车辆保持在车道内行驶。LCC则不然,是一种持续控制车辆横向运动,使车辆保持在车道中心行驶的功能。
GBT 39323-2020对LKA的要求比较简单,充满了大量模糊性要求,好多表述也不够严谨,感觉很像是为了凑数的一份标准,我们捡干的唠唠。
LKA激活车速范围70~120km/h,系统激活时引起的车辆横向加速度应不大于3m/s2,变化率不大于5m/s3。
对于LDP,应确保车辆前轮外沿不超过车道线外侧0.4m。因为LDP激活可以通过控制制动系统来进行纠偏,因此激活时要求引起的车辆纵向减速度应不大于3m/s2,车速减速量应不大于5m/s。
GBT 41796-2022是2023年5月实施的一份针对商用车(M2、M3、N1、N2、N3)LKA功能的推荐性国家标准。该标准定义LKA应至少包含LDP功能,LDW功能可选。这一份标准晚了2年出来,明显比乘用车那份丰富及合理多了。
标准里对不同车辆类型的LKA激活速度作了不同要求,如表6。
表6 不同车辆类型LKA激活速度要求
一、LDP
对于N1类车辆,LDP应确保车辆前轮外沿不超过车道线外侧0.4m,对于M2、M3、N2、N3类车辆,LDP应确保车辆前轮外沿不超过车道线外侧0.75m。
LDP激活时引起的车辆横向加速度应不大于3m/s2,0.5s内平均变化率不大于5m/s3。LDP系统引起的车辆纵向减速度应不大于3m/s2,若LDP激活引起的纵向减速度大于1m/s2,车速减速量应不大于5m/s。
且当在直道(道路曲率半径>5000m)纠偏过程中,若偏离侧前轮外沿超出车道线,以偏离侧前轮外沿回到车道边界开始计时,车辆应该车道内行驶至少5s;若偏离侧前轮外沿未超出车道线,以系统干预开始,车辆应该车道内行驶至少5s。
二、LDW
预警信号最迟应该偏离侧前轮轮胎外缘越过车道线0.3m发出,也就是DTLM<-0.3m前。
04 小结
紧急车道保持功能做得好,可以显著减少危害事件的发生,也期望主机厂能在这些基础辅助功能上多下点功夫。



编辑推荐



最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
