




 广告
广告





















































悬置动刚度 - 1

对于悬置动刚度的测试,传统方法是用动刚度试验机来完成。但动刚度试验机的频率范围通常只能到几百Hz,而且只能得到平动方向的动刚度,无法考虑旋转自由度。
近年来,随着电动汽车的迅猛发展,电驱悬置的设计需要更宽频的动刚度特性数据。此外,为了在研发过程中,能够更早期的预测和把控整车NVH性能,部件TPA(C-TPA)技术以及虚拟样车装配(Virtual Prototype Assembly,简称VPA)技术的应用越来越广泛,而VPA中往往还需要考虑旋转自由度。因此,动刚度试验机的局限性就越发凸显了。而近年来,基于频域子结构理论的一些新的悬置动刚度识别方法,逐渐成为了研究的热点。
1 悬置动刚度理论模型
悬置动刚度的理论模型如图1所示,2为悬置主动端,3为悬置被动端,F2为电驱作用到悬置上的载荷,F3为被动端结构(如副车架、车身)的反作用力,u2、u3分别为主被动端的振动位移。(F2、F3、u2、u3均为对应6个自由度的向量)
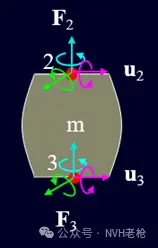
图1 悬置模型
根据动刚度的定义,有:

其中:Z_22是主动端原点6×6刚度矩阵;Z_33是被动端原点6×6刚度矩阵;Z_23和Z_32则是主被动端的6×6跨点刚度矩阵(根据互易性原理,二者应相等),上标m代表悬置(mount)。
F3实际上就是TPA中所说的被动端结构所承受的接触力(Contact Force)或界面力(Interface Force)。显然此时的F2和F3并不一定相等,也就是悬置主被动两侧所承受的载荷是不同的。这一点和TPA中的常规假设实际上是不一致的。例如,我们在经典TPA的悬置动刚度载荷识别中,用到的公式:

实际上是基于如下两个假设条件:
1)弹性元件质量可忽略;
2)弹性元件各自由度间不存在耦合。
满足上述两个假设条件时,公式 (1) 动刚度矩阵中的各块阵就会有如下关系: ,此时就有了 ,即公式 (2) 。
2 子结构理论中的动刚度
子结构A、B与悬置m构成一个系统。假设在A的悬置连接2的位置,以及B的悬置连接3点位置分别作用有激励 F2A 和 F3B。
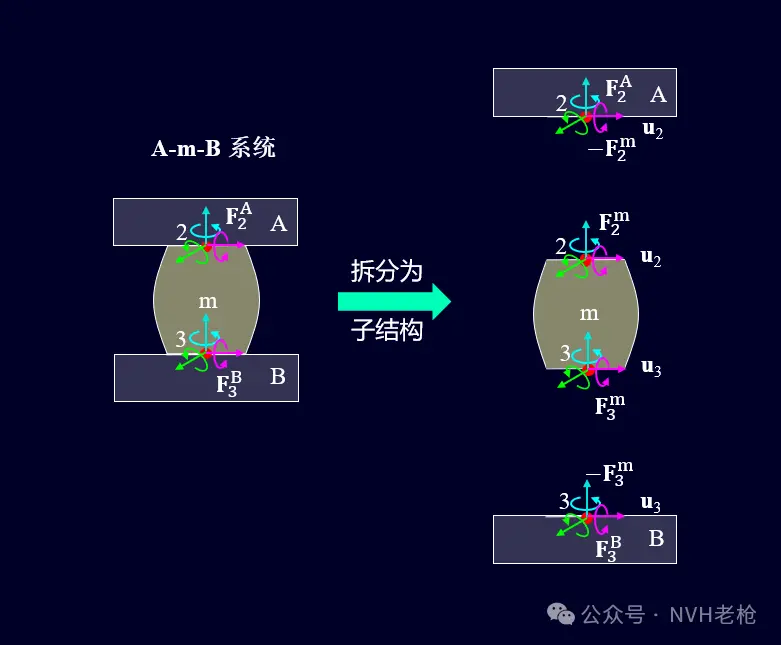
图2 A-m-B系统动刚度分析
将A-m-B系统,拆解为各个子结构,并分别进行受力分析,可得到如下方程:

进行如下变换:等式左边刚度矩阵的前两行相加,后两行相加,对应等式右边力向量的前两行相加,后两行相加,可以得到:

式右边对应的就是A-m-B系统的刚度矩阵 ZAmB,而这个系统动刚度矩阵是可以通过实测的系统传函矩阵 HAmB 求逆得到:

观察系统动刚度矩阵中的各块阵,可以看到非对角位置的块阵只与悬置动刚度有关,而与A、B结构无关。而这就是基于子结构理论的悬置动刚度识别方法的根本。







最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
