




 广告
广告





















































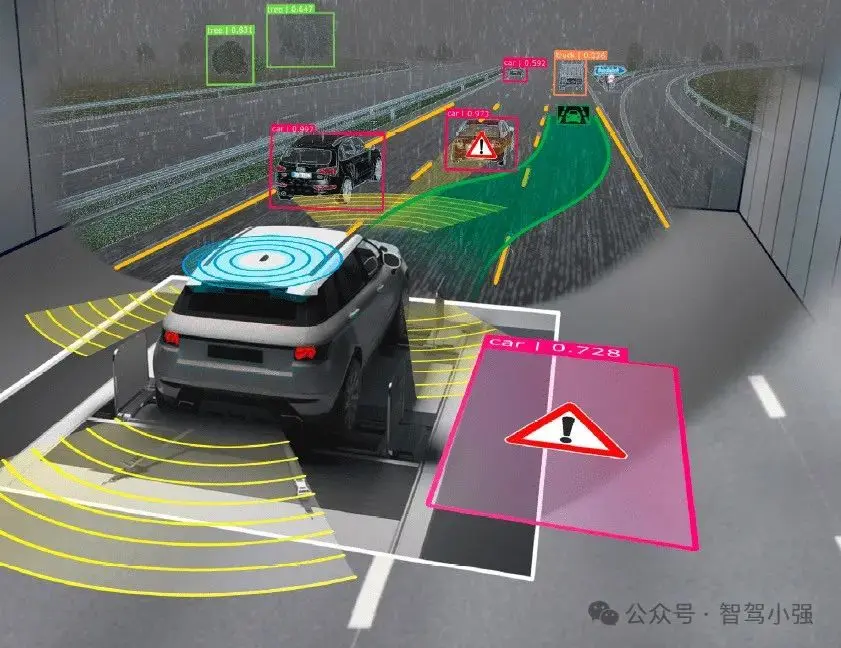
自动驾驶合规宝典11~典型高速公路场景库

2020年6月,联合国法规R157-ALKS自动车道保持系统(高速公路L3级自动驾驶系统)获得通过,并于2021年1月起正式生效(最高限速60km/h)。
2022年3月21的R157第二修订版中增加了软件版本管理R157SWIN的要求;2023年3月3日的第四修订版扩展了其适用范围(从M1类乘用车扩展到M类和N类车辆)和车速上限(最高车速调整到130km/h),以更好地适应自动驾驶技术的发展。
最新版的R157法规将覆盖完整的高速公路区间,搭载ALKS的车辆需要能够应对高速公路的所有交通场景。为了证明ALKS的安全性,搭建一个完整的高速公路交通场景库,对主机厂、认证服务机构、监管机构来说势在必行。
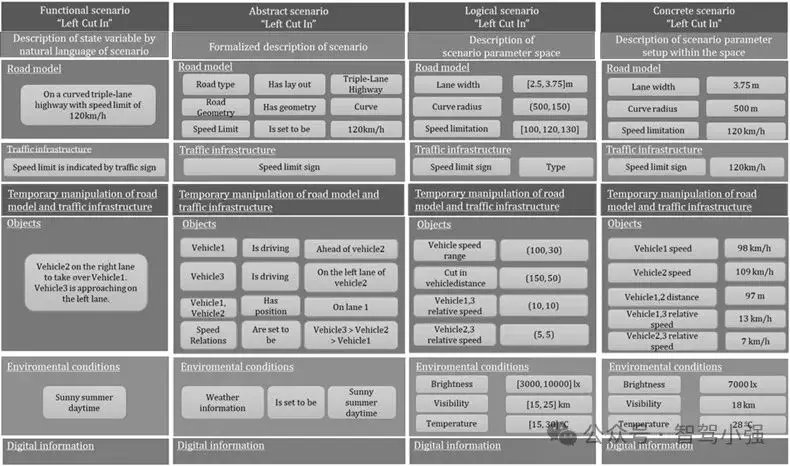
由前文可知,交通场景可以按照不同的抽象等级分为功能场景、抽象场景、逻辑场景、具体场景。
功能场景可以涵盖几个方面,例如:不同抽象级别的道路几何(例如:双车道直道高速公路)、环境条件(例如:夏季晴天)、自车行为(例如:跟车行驶、变道)、移动/静止目标(例如:前方隧道、限速牌、突然切入的旁车)等。
逻辑场景应涵盖功能场景未涵盖的其他方面,例如,绝对速度、加速度、位置、故障、通信故障、更详细的道路几何形状。逻辑场景又称为包含的参数场景,参数一般是一个范围或概率分布。
具体场景则是用明确的参数值描述物理属性的场景。
功能场景:碰撞总是自车与其他车辆/物体发生(假设自车在没有其他车辆/物体的情况下可以正常运行),在正常驾驶下,自车与其他车辆/物体的交互可以适当地涵盖与其他车辆/物体的碰撞。
逻辑场景:功能场景中未涵盖的因素(例如自车、其他车辆/物体的初始速度、尺寸、初始位置、加速度)、一些感知因素(例如环境亮度、盲点、导致传感器误报的因素、其他车辆的闪光灯)和车辆稳定性因素(例如道路曲率、坡度、路面摩擦系数、风速等细节)可以在逻辑场景中用参数描述。
一种场景族识别方法
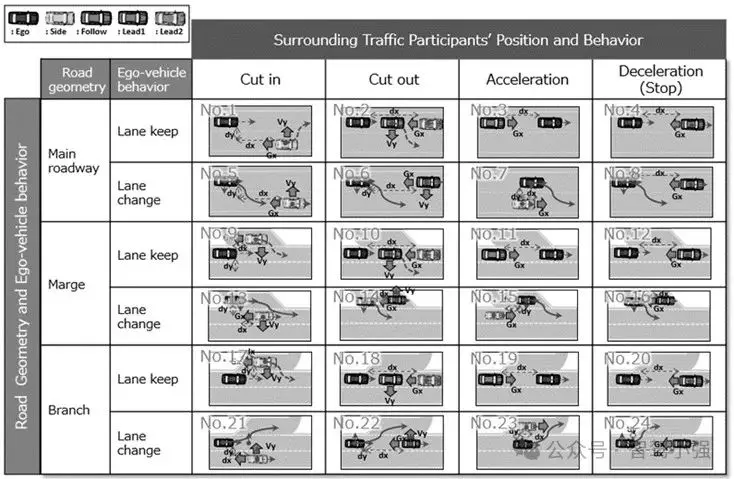
为了正确描述12种场景中的这些情况,应在逻辑场景级别包括一些参数,例如“车道数”、“自车所在车道”和“自车与其他车辆之间的相对位置”等。“主干道”的示例如下所示。“合流道路”和“分流道路”中的其他情况也应考虑在内。
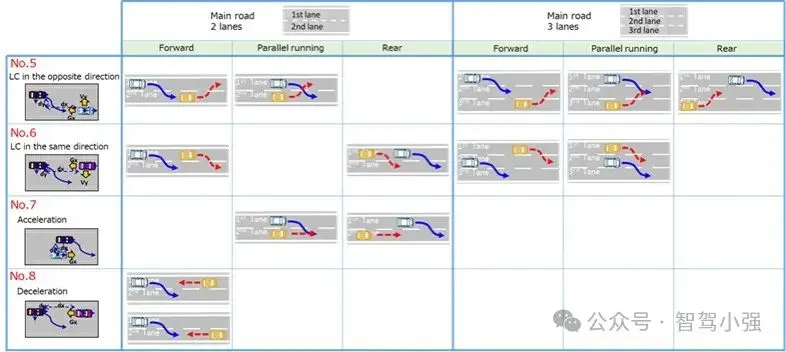
L3级的高速自动驾驶系统ALKS在设计时至少要考虑以下典型高速公路场景。
高速公路用例的示例场景列表
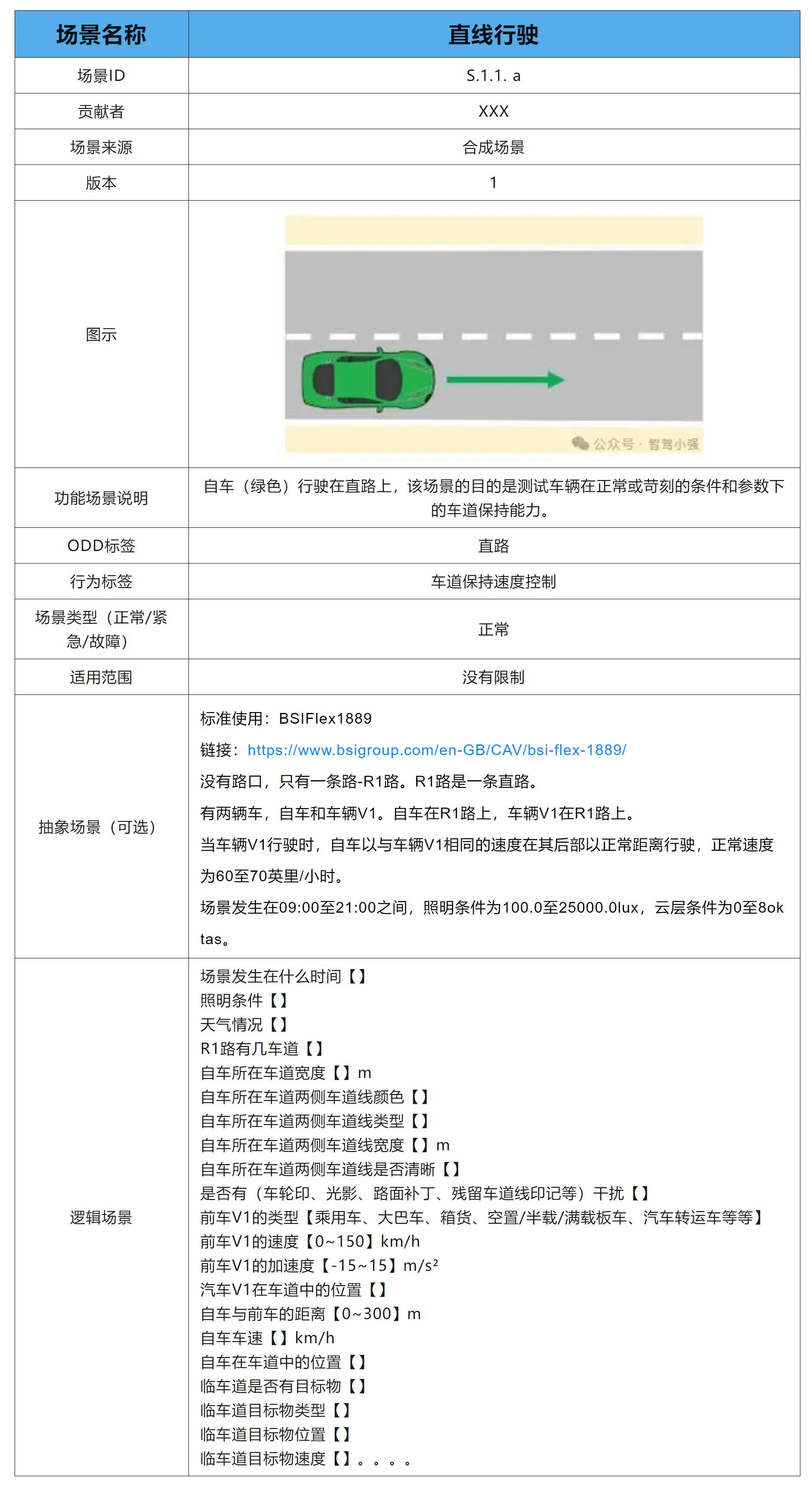
1. 直线行驶
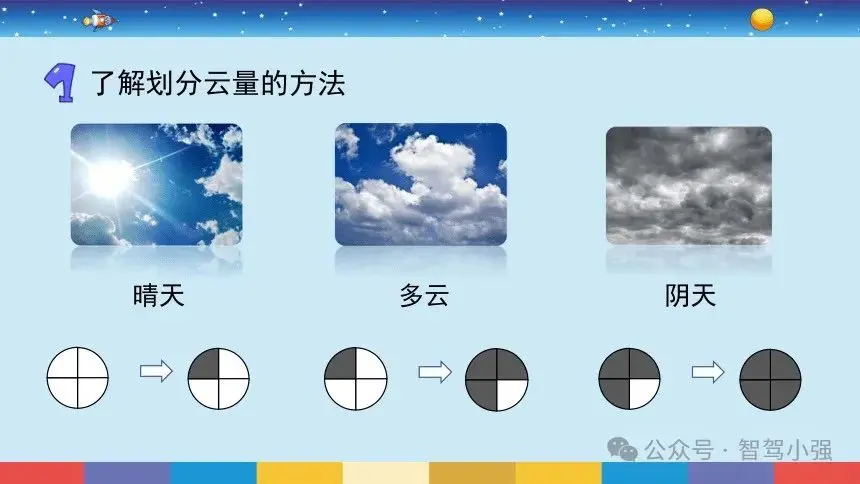
okta为云量单位,将天空等分为8份,看云在天空中所占比例。
(0~2oktas)小于1/4为晴天;
(3~6oktas)1/4~3/4为多云;
(7~8oktas)大于3/4为阴天。
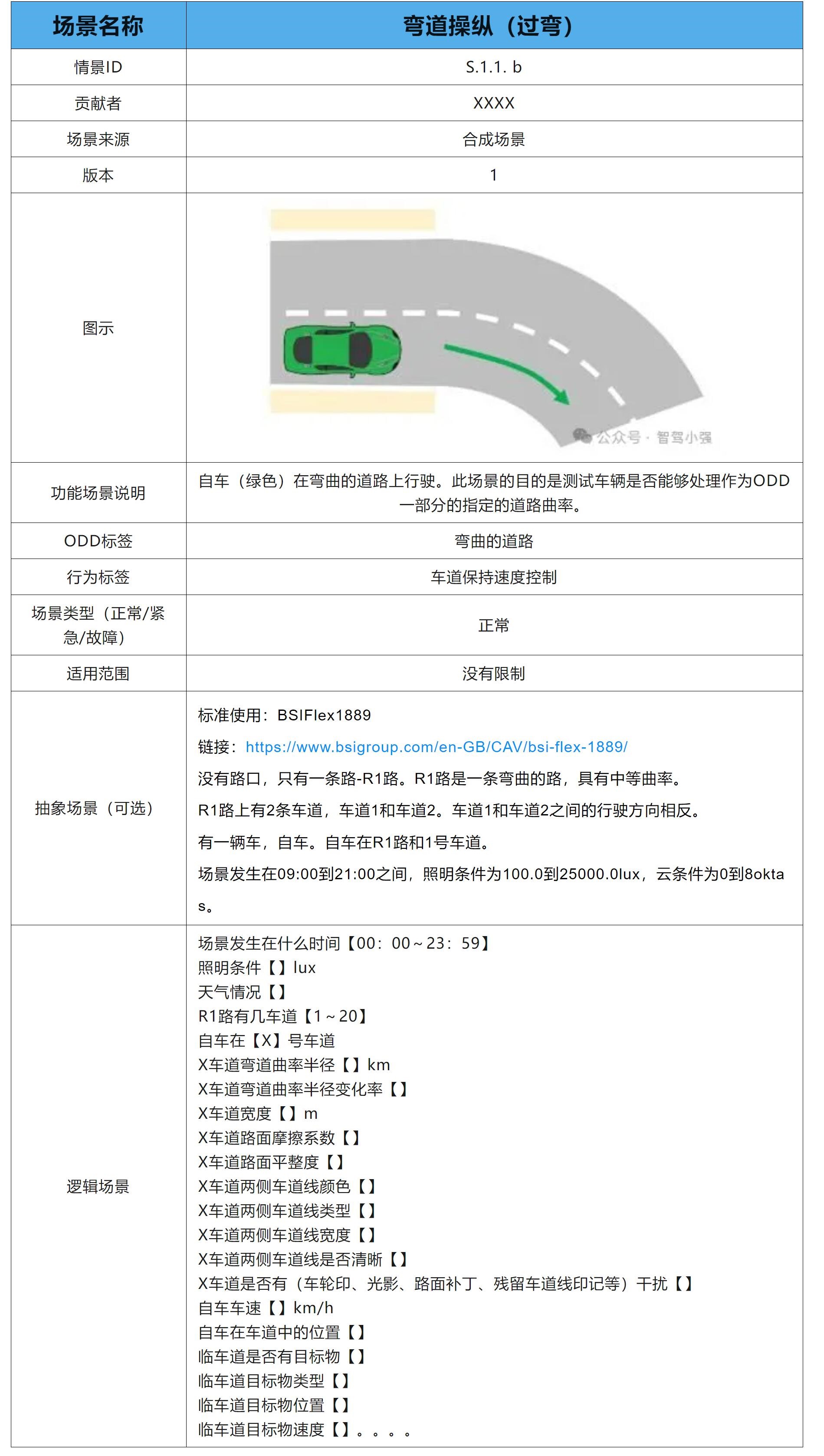
2.弯道过弯
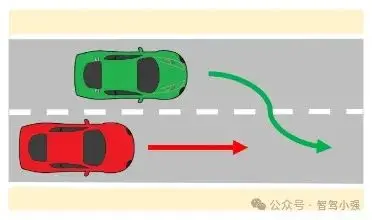
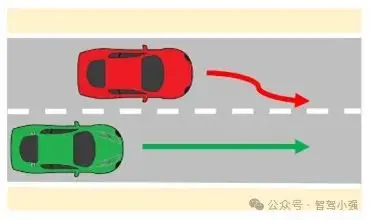
3. 自车变道,后方有车
在相邻的车道上,另一辆车(红色)与自车(绿色)行驶在同一方向。自车的意图是,向另一辆车行驶的车道进行变道。
4. 合并到已占用的车道
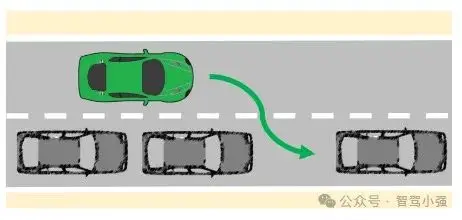
其他车辆(灰色)占据自车相邻的车道。
自车辆(绿色)打算执行换道到其他车辆[1-4]行驶的车道。
根据道路,其他车辆的类型、几何形状、速度、数量和位置,场景的难度发生变化(正常-紧急)。
5. 目标路径上有不可通过的目标
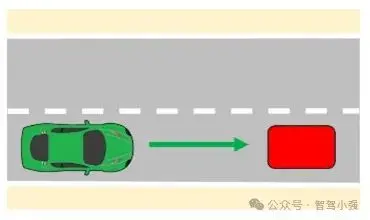
自车(绿色)行驶在有无法通行物体(红色)的道路上,自车的目标是继续直行,自车需要做出反应。
目标可能是故障车辆、货车遗落货物、事故车辆碎片等。场景的严重程度根据自车的速度情况在变化。
6. 目标路径上可通过的目标
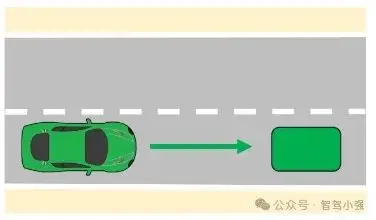
自车(绿色)在车道上有一个可通过的物体(绿色)的道路上行驶,例如,井盖、修路钢板、塑料袋或小树枝、空中交通标识牌等。自车的目标是继续直行,自车需要做出反应。场景的严重程度根据自车的速度情况在变化。
测试参数:自车的反应(误报、变道/制动)、与物体的距离、自车的横向速度(如果变道)等。
7. 前车制动
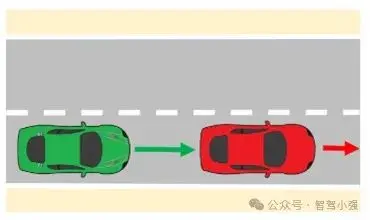
测试参数:自车与LV的距离、对相邻车道其他车辆的反应等。
8. 接近较慢/停止前车LV
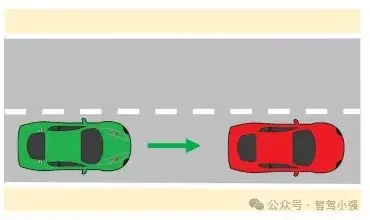
前车LV(红色)以较慢的速度行驶在自车(绿色)前面,自车可能会刹车或进行变道以避免碰撞,根据LV和自车的速度,可以评估这种情况的严重程度。
场景参数:自车速度(道路规则),LV速度变化(减速),(本车道、邻车道、间隔车道等)其他车辆的位置和速度(如果存在)。
测试参数:自车与LV的距离、对相邻车道其他车辆的反应等。
9. 其他车辆在自车前面切入
另一辆车(红色)在相邻车道上与自车(绿色)朝同一方向行驶。另一辆车换道,从自车的角度来看,这是LV。根据LV的距离和横向速度变化,切入动作的严重性会发生变化。
场景参数:LV横向速度,自车到LV的横纵向距离,自车速度,车道宽度,其他车辆的位置和速度曲线(如果存在)。
测试参数:自车与LV的距离、与其他车辆的距离等。
10. 在自车前切出
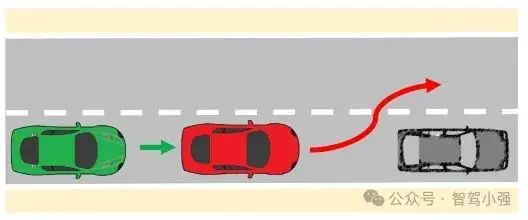
前车LV(红色)与自车(绿色)行驶在同一方向。
LV进行车道变换,使其不再是自车的LV。
为了测试自车的行为,自车前面的车道上存在障碍物(灰色)。
根据自车的速度、LV的横向速度、自车与无障碍物距离的变化,此场景的难度会发生变化。
场景参数:LV横向速度,自车到LV的距离,自车速度,车道宽度,其他车辆的位置和速度概况(如果存在)。
测试参数:自车与障碍物之间的距离,与其他车辆的距离等。
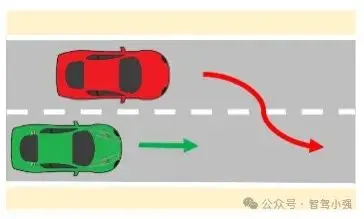
11. 检测并响应突然转向车辆
另一辆车(红色)与相邻车道上的自车(绿色)行驶在同一方向。另一辆车转向自车的车道,可能会变道进入本车道,也可能会进行纠偏操作。
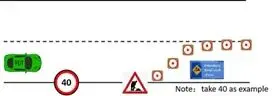
12. 限速变化
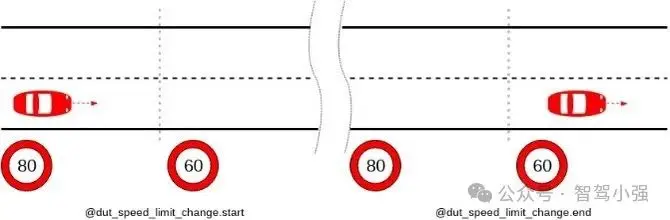
自车(红色)行驶在限速变化的直路上,自车的目标是在进入低速区时通过减速来适当地响应限速变化。
环境要求:至少有一次限速变化的直路。
自车行为:自车在道路上直行,使其速度适应不断变化的限制。
场景参数:其他车辆的位置和速度曲线(如果存在),自车速度。
测试参数:自车的纵向控制(制动/加速),自车的感知能力。
13. 信号灯
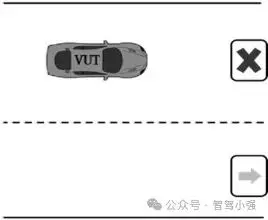
测试道路由至少两条车道组成,测试道路的车道具有设置在道路上方的智能车道标识。自车(灰色)定位在指示为关闭的车道中,相邻车道的信号灯保持开放状态。
自车的目标是在车道显示为不可用时,通过改变车道来适当响应信号灯。
环境要求:至少有两条车道的道路,以及指示车道状态的智能信号(开放/关闭)。
自车行为:自车在路上行驶,根据信号灯指示需要改变车道。
场景参数:其他车辆的位置和速度曲线(如果存在),自车速度。
测试参数:自车的反应(变道/制动),自车的横向速度(如果变道)等。
14. 开车通过隧道

自车(绿色)正在通过隧道行驶(缺乏GPS信号和自然光),车辆需要适应快速变化的光照参数和缺乏GPS定位。
根据自车的速度、隧道内外光照条件的差异、隧道长度和是否有障碍物等,场景的难度会变化。
15. 收费站
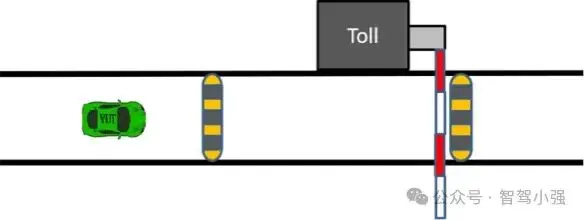
自车(绿色)行驶在至少有一条车道的长直路上,这条路上设有收费站,收费站前设置收费站标志、限速标志和减速带,自车的目标是安全进出收费站,必要时减速和/或停车。
场景参数:道路布局(减速带和收费亭等元素的位置),其他车辆的位置和速度范围(如果存在),自车速度。
测试参数:自车的反应(减速/停止)。
16. 常规避障
场景参数:道路布局(路径上障碍物的可见性),其他车辆的位置和速度范围(如果存在),自车速度。
测试参数:自车的反应(变道/制动),自车的横向速度(如果变道)等。
17. 路口博弈
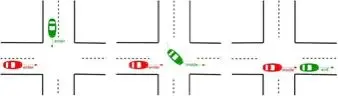
对于自车(绿色)来说,路口是一个挑战,因为与其他参与者发生冲突的可能性增加了。
在这种情况下,自车与另一辆车(红色)——拦截器同时穿越十字路口(环形路口)。这种情况测试了自车在十字路口与另一辆车冲突时的行为,可能有优先级标志、信号或红绿灯。
自车应该能够安全地通过十字路口,避免或减轻碰撞。
18. 对方逆行
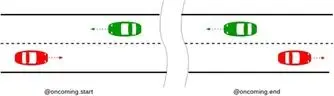
自车(绿色)正常行驶,一辆汽车(红色)因走错路或借道超车,从相反的方向在本车道或相邻车道接近自车,并驶过自车。
自车应能安全应对。
- 下一篇:【渗透测试】车辆常用渗透测试项目及软硬件资源
- 上一篇:国内首个线控转向标准加速落地







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
