




 广告
广告





















































ENCAP2024驾驶辅助系统Assisted Driving测评解读

1.背景
2.驾驶员参与 Driver Engagement
3.车辆辅助 Vehicle Assistance
4.安全备份 Safety Backup
1. 背景
ENCAP在2018年发布了关于高速辅助系统的第一份出版物,随后在2024年加入了一个额外的“城市”驾驶场景。该测评协议目的是为消费者提供有关辅助驾驶系统的更详细信息,驾驶辅助系统通常作为选配提供(选配即可参与评审),因此不被考虑在ENCAP星级评级中,ENCAP的五星必须是标配才能参与。
对于高速和城市驾驶辅助系统,ENCAP专注于两个主要领域,即:
Assistance Competence 辅助能力(100 points),即车辆辅助和驾驶员参与之间的平衡;
以及Safety Backup安全备份(100 points)。
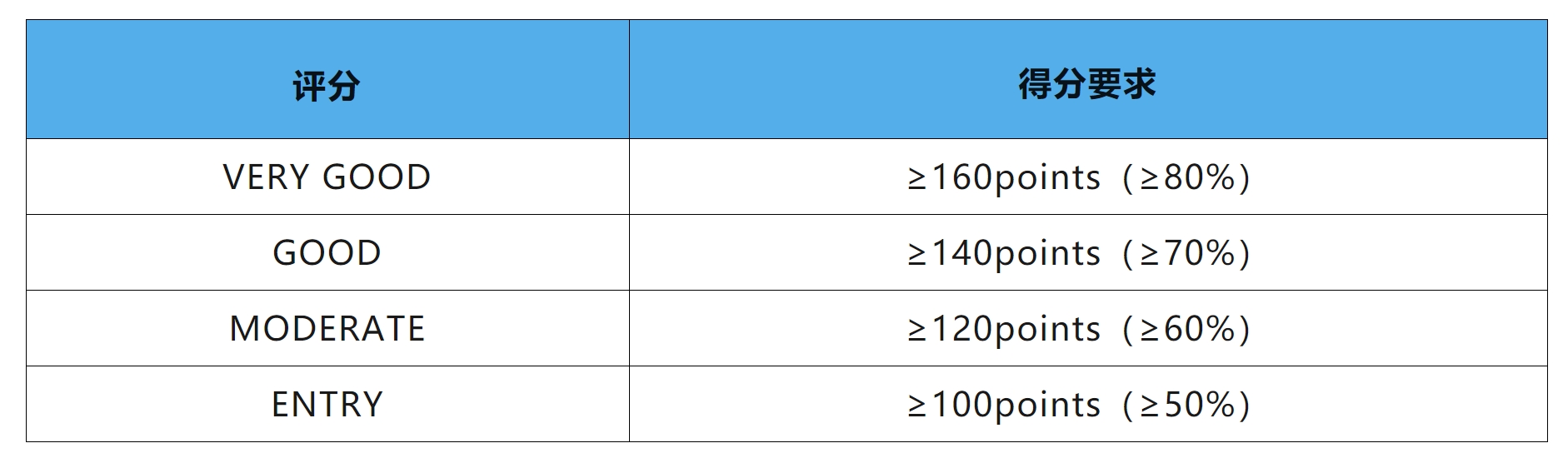
辅助能力和安全备份得分的总和用于评分系统,类似于五星级安全评级。
用于评估的车辆应包括所有相关的辅助驾驶选项(即使作为选装也行,用最高配测试;ENCAP五星必须是标配)。
Assistance Competence 辅助能力分为 Driver Engagemengt 驾驶员参与(100 points)和 Vehicle Assistance 车辆辅助(100 points)两部分,辅助能力AC最终得分为两者中较低的得分。
2. 驾驶员参与Driver Engagement
Driver Engagemengt 驾驶员参与包括四个要素:consumer information消费者信息、system status系统状态、driver monitoring司机监控、driving collaboration驾驶协作。
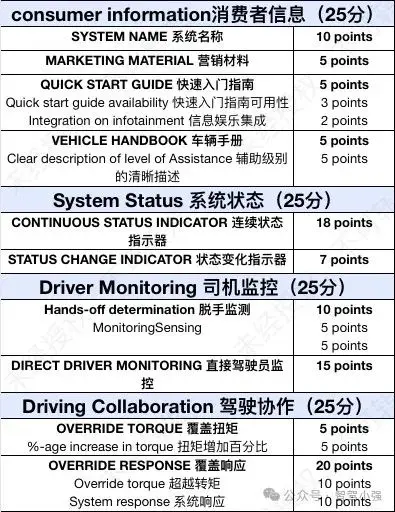
2.1 消费者信息Consumer Information
消费者对系统能提供多少帮助的期望会受到他们获得的信息的影响。这部分主要要求整车厂提供给消费者的信息不能具有误导性。例如不能明明是辅助驾驶的系统,却叫xx pilot,属于考试中的送分题。任何潜在的驾驶员都应该清楚,该系统仅是一个辅助系统,并且始终需要驾驶员监督。
(i)系统名称(10 points)
当整车厂以单一名称销售纵向和横向辅助系统时,应使用该名称的分数。如果车辆制造商分别销售纵向和横向控制系统,则应评估每个名称,并使用两个分数中的最低分数。
系统名称应包含 “assistant”, “assistance”, “assist” 等“辅助”字眼时,将获得10分。
系统名称不得包含 “auto”、 “automatic”, “automated”、“pilot”、“self-drive”等“自动”字眼,如果使用则为0分。
如果系统名称既不包含术语“assist”,也不包含“auto”或 “pilot”的变体,则得5分。
(ii)营销材料(5 points)
ENCAP无法在所有销售被测车辆VUT(Vehicle Under Test)驾驶辅助系统的国家监控和评估与该辅助系统相关的每一份营销材料。然而,在评估期间,将花费时间审查与车辆制造商评估和发布的辅助系统相关的公开可用营销材料。这将包括但不限于电视和广播广告、车辆手册和在线信、车辆制造商网站(搜索以包括网站内特定型号和功能,并使用“定制化”服务,能够定制相关功能也是不允许的)。
营销材料并未暗示该系统提供的辅助水平比真实提供的更高。如果营销材料正确描述了系统功能,将获得5分。当发现一个或多个违规行为时,则为0分。
将系统描述为automated system自动化系统、 pilot巡航、self-driving自动驾驶、驾驶员手不触碰方向盘(脱手)或在车辆行驶时驾驶员分心(脱眼)等都是不允许的。
任何描述更高功能但明确标记为“未来技术”或“在该地区不可用”或类似的功能描述是允许的,除非故意误导,即使用该功能作为标题。
(iii)快速入门指南(5 points)
制造商应向消费者提供有关驾驶辅助系统基本操作和系统限制的信息,即“快速入门指南”。这些信息应以车辆手册的补充形式提供。快速入门指南可在智能手机/平板电脑上访问,也可以纸质格式、无纸化/数字格式、教程视频/动画/交互体验等形式提供。
如果车辆制造商有其他方式向消费者提供信息,他们应与测试实验室和ENCAP秘书处联系,后者将评估其是否符合要求。
(ⅳ)用户手册 (5 points)
用户手册应向消费者明确说明该系统是辅助系统,并且始终需要驾驶员参与。手册应详细说明系统和控制的操作。手册应详细说明系统的预期用途和系统操作的限制。
如果用户手册清楚地描述了系统及其限制,将获得5分。
2.2 系统状态System Status
此评估旨在持续评估系统提供给驾驶员的信息,以确认系统状态:非激活、仅横向激活(LKA)、仅纵向激活(ACC)、横纵向均激活(ICC)……
此评估还旨在评估系统辅助水平发生变化时提供给驾驶员的信息。
仅提供视觉信息(驾驶员协助级别增加,例如从脱手变为非脱手)。
视觉信息和听觉或触觉警告(驾驶员协助水平降低:例如脱眼、脱手)。
如果主机厂对驾驶员有不同的系统状态指示方法,在更换辅助装置时连续或暂时应用,制造商应与测试实验室和ENCAP秘书处联络,后者将考虑是否以及如何将该指示器纳入评估。
先决条件:
为了有资格进行评估,所有系统状态指示器应作为辅助系统的一部分安装在车辆上。
为了有资格进行评估,辅助系统不得与驾驶员禁用的主要指示器一起使用。这适用于与系统相关的视觉、听觉或触觉指示器。
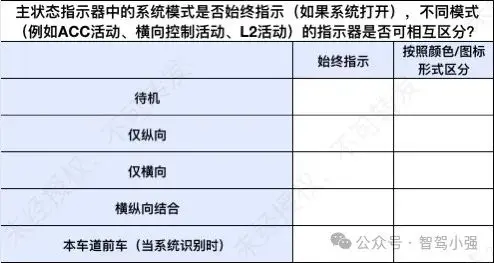
系统状态持续指示评估:
在此评估期间,车辆应按照如下模式,至少分别驾驶一次:
手动模式(待机,无辅助)
仅纵向控制(例如ACC)
仅横向控制(如果有,例如LKA)
纵向和横向控制相结合。
如果系统需要某些参数以获得一定的辅助水平,测试实验室应在合理范围内满足这些要求。
当每个驾驶模式始终被指示,并且相应的指示与其他模式可区分时,每个系统模式可获得0.5分。此外,系统模式在抬头显示或驾驶员视野(±15°)中的其他附加显示器中指示时,每个系统模式可获得1.5分。
当状态指示符合一般人因指南和设计原则时,每个系统模式得分为0.416分(5/12)。
以下问题需要回答:

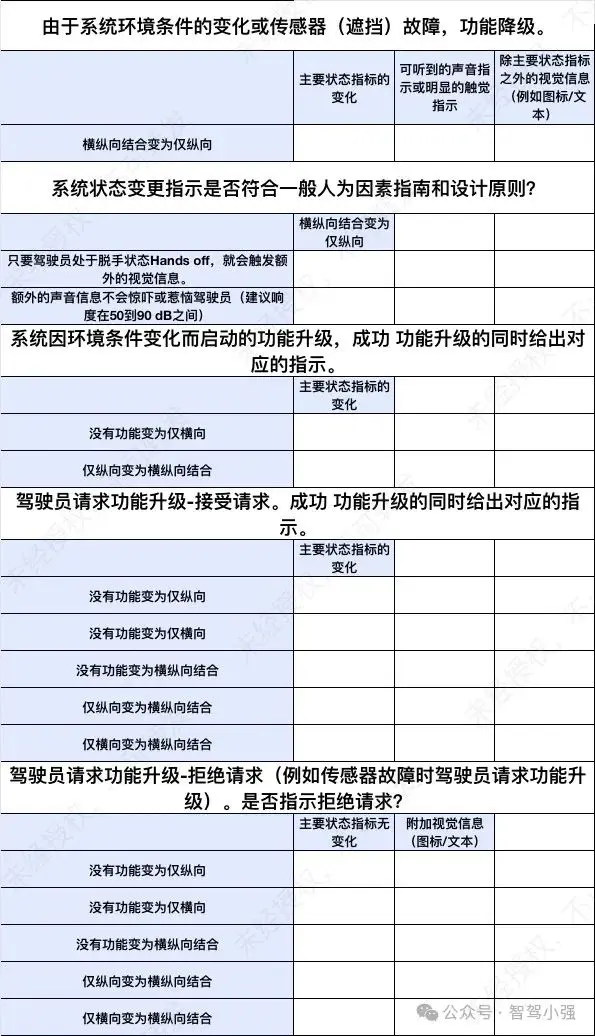
系统状态变更指示评估:
ENCAP没有具体说明如何实现系统状态的每次更改,因为所需的条件可能因车辆而异。进行评估的测试实验室应满足系统的要求,以实现系统状态的每次更改,在可能的情况下,不进行与正常驾驶大不相同的操作。要求测试驾驶员在过渡期间保持专注,因此由于驾驶员监控而提供的辅助更改不被接受(脱眼不在此范围内),因为它们在其他地方进行评估。
对于提供给驾驶员的辅助级别之间的以下每个转换,记录系统向驾驶员指示转换正在发生的方式。
发出声音和/或触觉警告以指示系统更改,得分为2分。
当显示额外的视觉信息时,将额外获得2分。
如果此信息符合一般人为因素指南,将额外得分1分。
最后,每拒绝请求的模式更改可获得0.2分的额外视觉信息。
以下问题需要回答:
2.3 驾驶员监控
被测试的系统可以大致归类为ENCAP定义的辅助驾驶系统或SAE定义的L2级驾驶辅助系统。这意味着驾驶员保留全部责任并与车辆共享控制权。车辆和驾驶员共享OEDR(Object Event Detection Response),驾驶员不得执行任何超出正常驾驶允许范围的任务。
脱手监测:
通过方向盘活动有效监测驾驶员参与度的系统,满分为10分。
联合国法规R79.04版规定了驾驶员在启动B1-ACSF(不可脱手ICC)功能时VUT干预的最低要求,需要注意的要点如下:
脱手15秒内发出光学警告。
脱手30秒内发出声学警告和红色光学警告。
系统在发出声学警告后30秒内停用。停用后需要额外的声学警告(与之前不同)至少持续5秒。
本次上电周期内已经出现3次脱手报警后,脱手应被视为系统停用的条件,或主机厂认为合适的更早的系统停用时机(例如,发出声学报警5s后系统停用)。
当符合以上R79规定时,得5分。
通过电容/直接传感(即,不是仅基于扭矩的传感)对手握方向盘检测的,得5分。
直接驾驶员监控:
直接DSM系统使用摄像头和/或其他传感器监测驾驶员参与度和/或认知状态,以检查驾驶员是否“眼睛盯着”和/或“大脑盯着”,只要满足以下先决条件,就有资格获得最高15分。
先决条件:
DSM应作为辅助驾驶系统的组成部分提供(即辅助驾驶系统的一部分);
如果由于摄像头遮挡或系统故障导致DSM不可用,则不可能激活辅助驾驶系统;
辅助驾驶系统应在DSM因完全摄像头遮挡或系统故障而不可用的10秒内停用,并且在DSM可用之前不可能再次启动它;
辅助驾驶系统的激活将强制激活DSM,如果后者在手动模式下关闭;
在DSM将驾驶员归类为无反应最多3次后,辅助驾驶系统应在驾驶员归类为有反应后5秒内(或在车辆制造商认为适当的时间)停用,并且在剩余的旅程中不得再次激活;
辅助驾驶模式和手动驾驶模式下的DSM声称的分心和疲劳状态相同
在辅助模式下,手动模式中使用的DSM分心警告阈值可以放宽(疲劳警告/干预警告在任何情况下都不应放宽),前提是满足以下条件:
长时间分心警告时间阈值不得放宽超过150%(例如,对于3秒的基线情况,最大值为4.5秒)
DSM分心警告策略应取决于ODD(例如:车辆速度和/或周围车辆的TTC)
在驾驶员参与被认为是ODD的一个关键的指标时(例如,复杂的交通情况),DSM的分心警告策略应与手动模式相同。
车辆制造商应根据ENCAP评估协议-SA安全驾驶-v10.2和TB036中概述的要求提供完整的DSM文档,此外还应至少包含:
辅助模式下DSM实施的理由和额外的安全效益;
辅助模式的具体DSM策略;(例如:疲劳时报警自动升级为灵敏或提前)
关于DSM系统保持驾驶员参与的有效性的证据。
测试实验室应按照TB039中概述的测试执行程序对DSM要求的性能进行抽查。
总共15分分布在以下情况中:
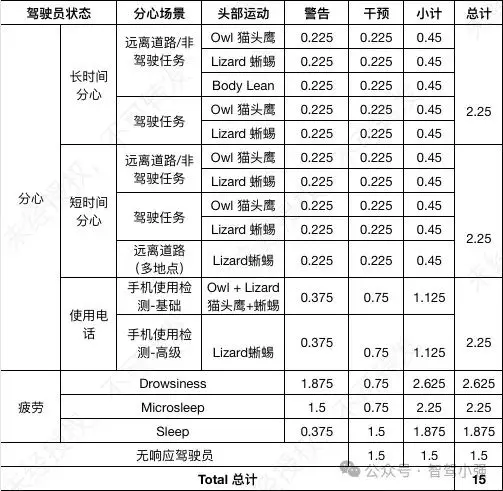
干预:是对ACC(调高跟车距离)、FCW(提高灵敏度)、LDW(提高灵敏度)等功能的任何特定策略,这些策略取决于具有已证明安全益处的驾驶员的状态。
嗜睡:场景只能通过直接式DSM进行测试得分。
2.4 驾驶协作
该评估旨在确定当转向辅助系统开启时车辆如何响应驾驶员转向输入,以避开本车道内的障碍物。
本测试中应使用直接转矩测量系统进行测试,其中所有转矩测量数据在取最大值之前应使用“截止频率为10Hz的12极无相位巴特沃斯滤波器”进行滤波。
辅助驾驶系统开启:
以表显45英里/小时(72公里/小时)的速度将VUT驶入两侧均有车道线的车道,开启具有连续转向辅助功能的ACC系统(ICC、B1-ACSF),并在可能的情况下关闭所有其他横向支撑系统(关闭LDP、ELKA、CSF、ESF、CDCF等)。激活连续转向辅助系统,并允许系统在车道内保持一致的位置(激活ICC系统,保持车辆居中行驶)。
将振幅为5度、频率为0.25Hz的全正弦波转向角施加于VUT方向盘上。
记录信号波前半段所需的最大转向扭矩。
重复测试三次,记录三次运行的平均最大扭矩。
辅助驾驶系统关闭:
在连续转向辅助系统关闭的情况下(关闭车道保持),使用ACC系统以表显45英里/小时(72公里/小时)的速度沿着两侧均有车道线的车道中心驾驶VUT,在车道内保持恒定速度和中心位置。
将振幅为5度、频率为0.25Hz的全正弦波转向角施加于VUT方向盘上。
记录信号波前半段所需的最大转向扭矩。
重复测试三次,记录三次运行的平均最大扭矩。
基于坑洞试验中的测量和行为,评估超越override力矩和超越override响应。
辅助驾驶系统开启时最大扭矩百分比增加(与系统关闭相比)之间的差异进行比较。

对于超越扭矩<5Nm的车辆,在坑洞测试期间,系统响应满分为20分:
当系统在整个操纵过程中提供持续的转向辅助,并在之后将车辆置于车道中心时,可获得20分;
当系统在操纵过程中(施加转向角期间)取消转向辅助,但一旦驾驶员再次将车辆集中在车道上,系统自动重新接合时,得分为10分;
如果系统在操纵期间(施加转向角期间)取消转向辅助,并且之后需要驾驶员重新激活,则不得分;
3.车辆辅助 Vehicle Assistance
Vehicle Assistance车辆辅助包括三个要素:Speed Assistance 速度辅助、Adaptive Cruise Control Performance 自适应巡航控制性能、Steering Assistance转向辅助。
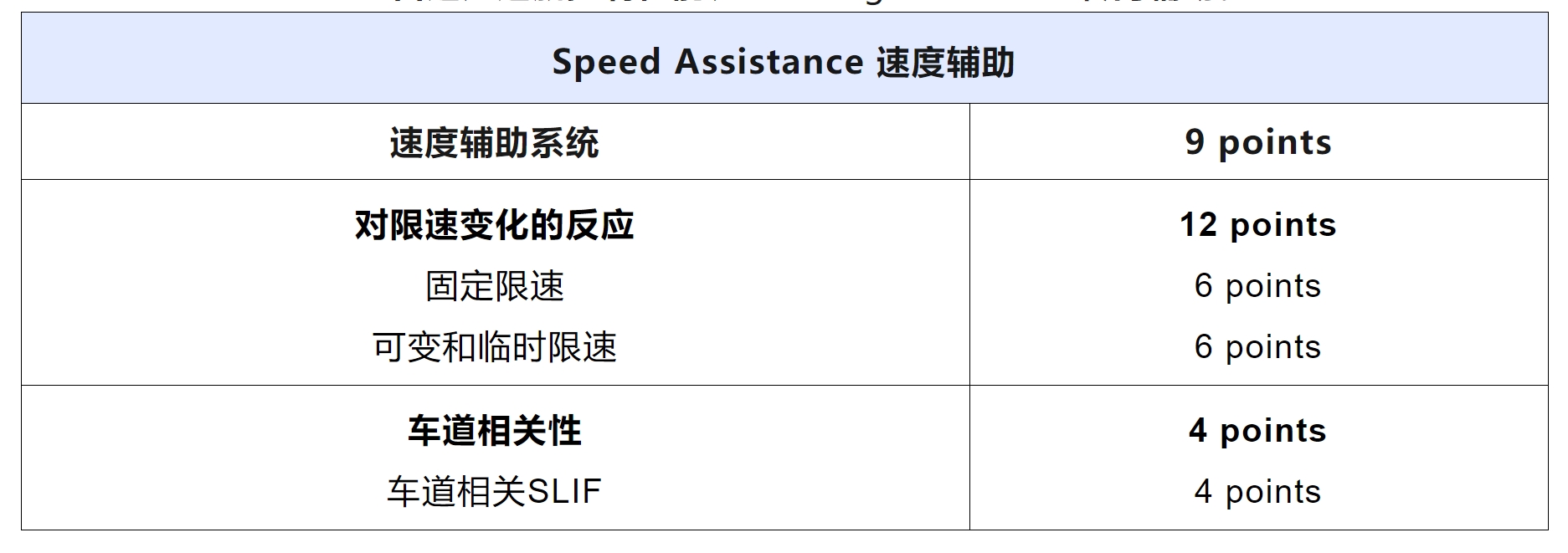
3.1 速度辅助SA(25 points)
利用摄像头和/或地图数据获得当前车道限速,ACC系统可以根据当前车道限速值自动调节或由驾驶员确认调节最高限速的系统称为iACC系统 (intelligent Adaptive Cruise Control)。
速度辅助测试根据《ENCAP速度辅助系统测试协议v2.0》进行测试,评估VUT识别速度限制变化并将速度变化应用或提供给ACC的能力。
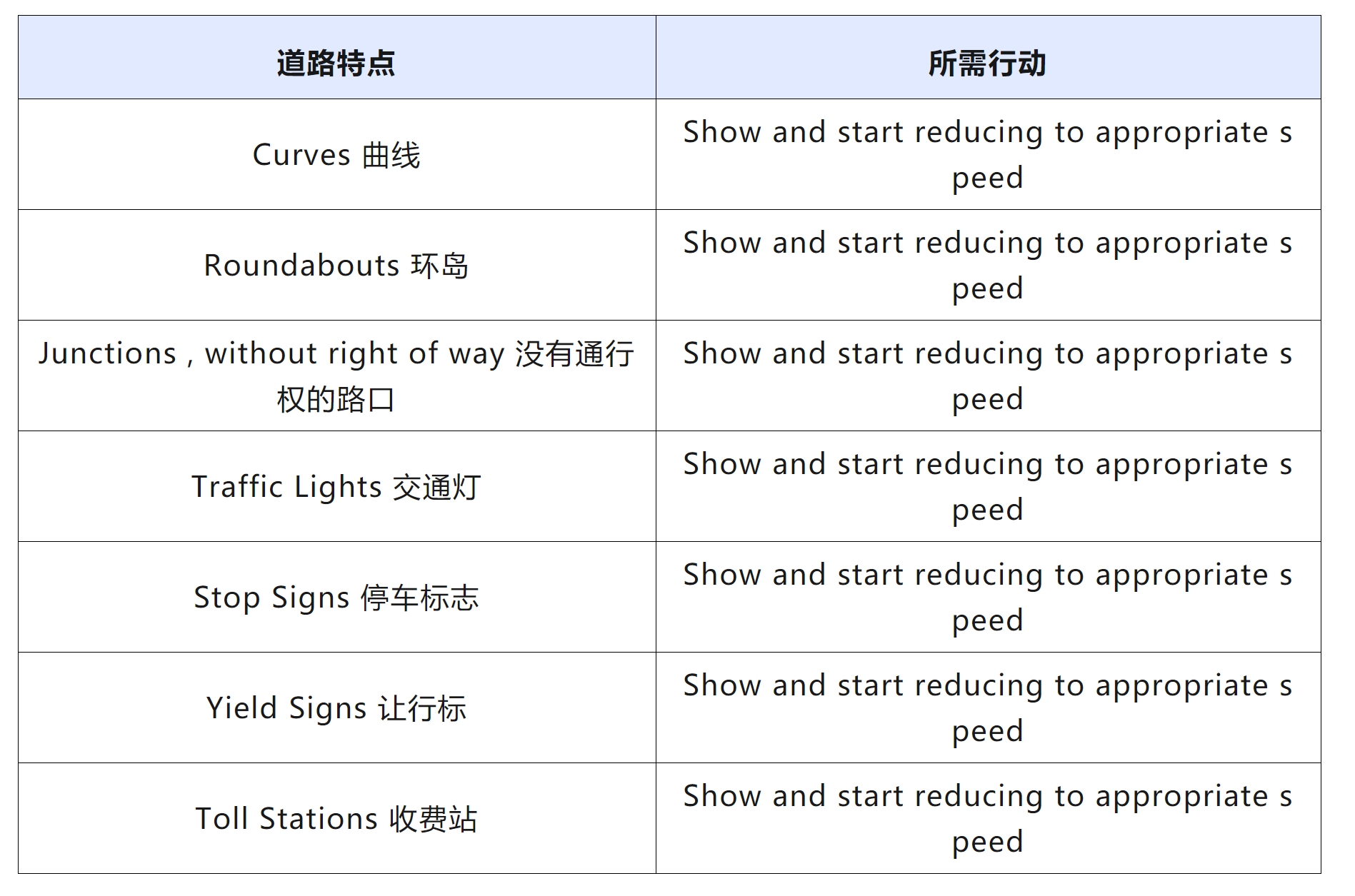
能够为即将到来的道路特征提供建议和速度调整并及时通知和警告驾驶员前方的危险事件的系统将获得奖励。
速度辅助系统评估:
ENCAP得分乘3为速度辅助系统得分。如果车辆被提交进行VA评估时,并且尚未通过ENCAP评级计划,则需要进行速度辅助系统测试,作为评估的一部分,遵循ENCAP速度辅助系统评估,详见ENCAP评估协议-SA安全驾驶-v10.2 中对以及以下领域的具体要求:
Road Features 道路特征
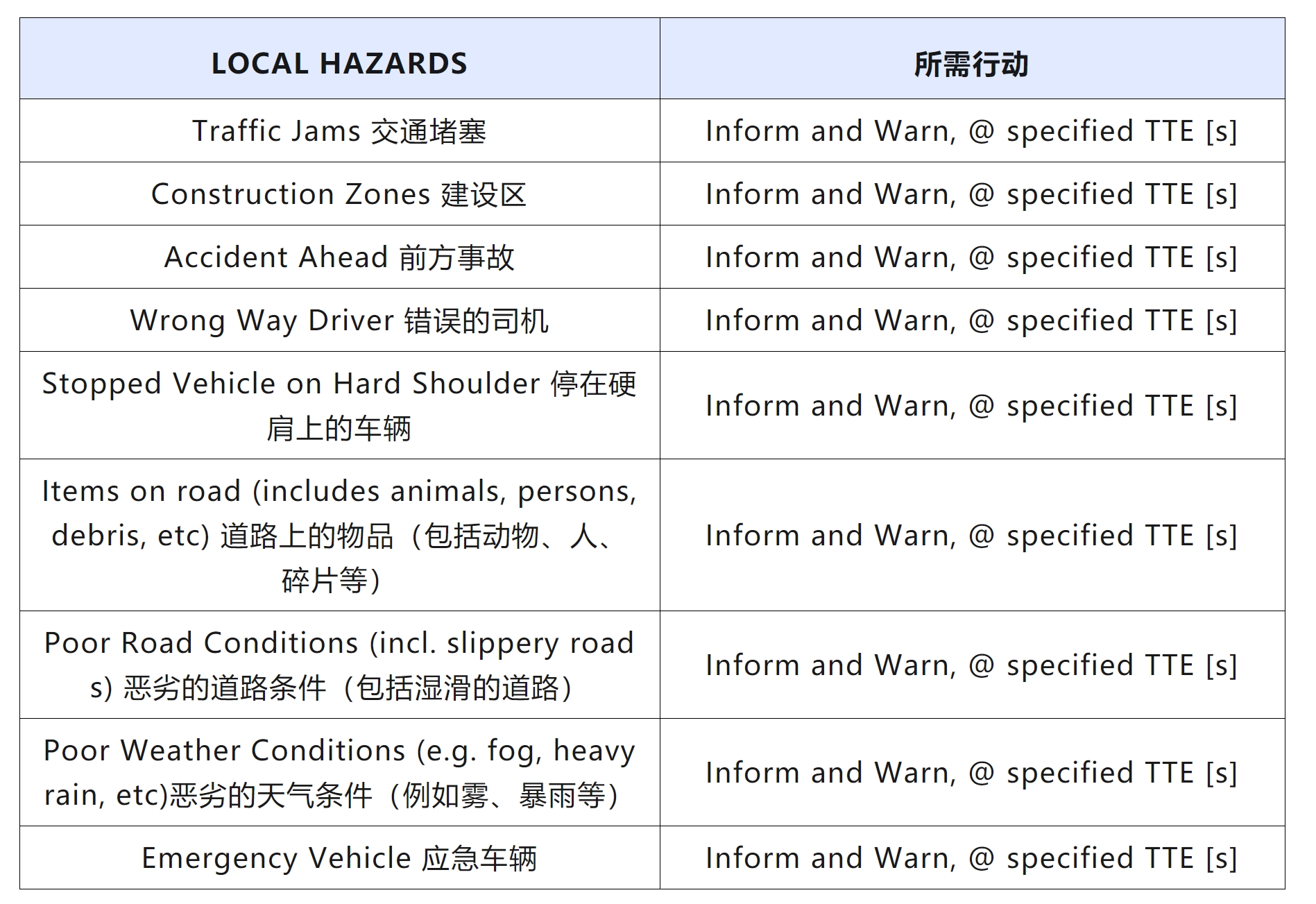
Local Hazards 本地危险
除了更改相对于速度限制的ACC设置外,当接近以下道路特征时,还可以使用其他点来减速:
额外的积分可用于及时通知和警告驾驶员有关下表中列出的危险事件。这将使驾驶员有足够的时间(车辆制造商指定的THE Time To Event事件时间)去预测危险事件。指定的TTE可能因事件不同而存在差异,但应在5到20秒的范围内。
在高速和城市驾驶辅助评估中,考虑到上述要求,SAS分数相比较ENCAP中增加了三倍。
对于限速变化的反应:
为了保持守法驾驶,车辆在到达指示速度限制变化的标志之前应调整速度。
车辆制造商应向测试实验室和ENCAP秘书处提供信息,显示车辆对限速变化的响应:
Fixed speed limits 固定速度限制
Variable and temporary speed limits 可变和临时速度限制
车辆制造商在提供信息时应考虑以下因素:
自动将速度调整到所需速度限制的系统,如果在车辆前轴通过标志之前将车速降低到较低速度限制[+2km/h],则应被视为及时采用了速度限制。
提供对新速度限制的调整但需要驾驶员手动确认的系统,驾驶员在提供限速下限后1.5秒内进行确认操作时,如果在车辆前轴通过标志之前,车速降低到下限速度[+2km/h],则应被视为及时采用了速度限制。
对于仅提供即将到来和当前速度限制信息的系统,当驾驶员在系统提供信息1.5秒后,手动将ACC设置为提供的较低速度限制,并且车速在车辆前轴通过标志之前降低到较低速度限制[+2km/h]应被视为及时提供信息。
测试实验室应在当地高速公路上进行短期路试,以验证此功能,并确认VUT响应符合车辆制造商的指示。
车道相关性:
配备车道相关SLIF并能够覆盖以下所有限速标志的车辆有资格获得4分。
Explicit 明确
Conditional (e.g., Arrows)
Dynamic / Gantry 动态/龙门架
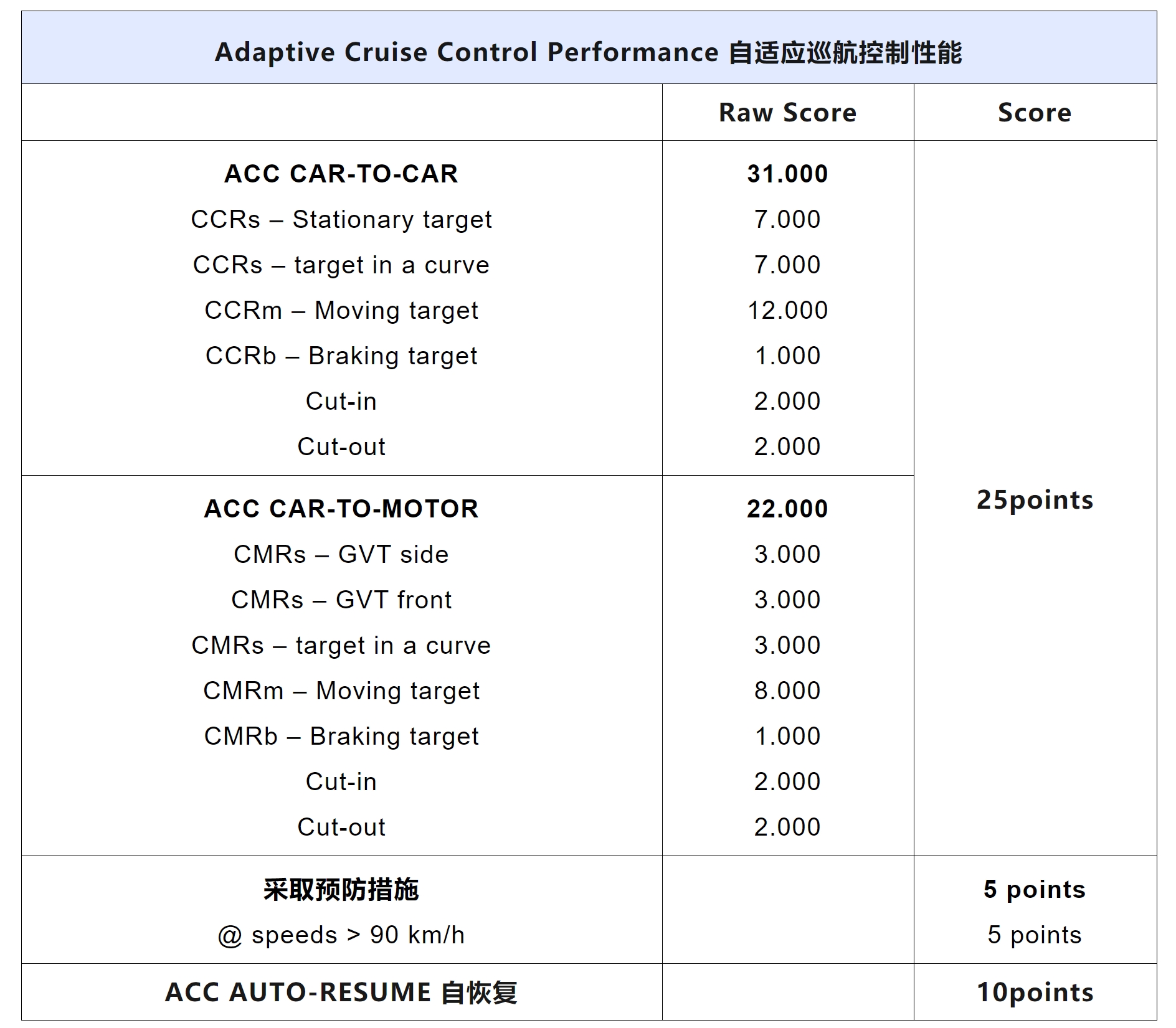
3.2 自适应巡航ACC(40 points)
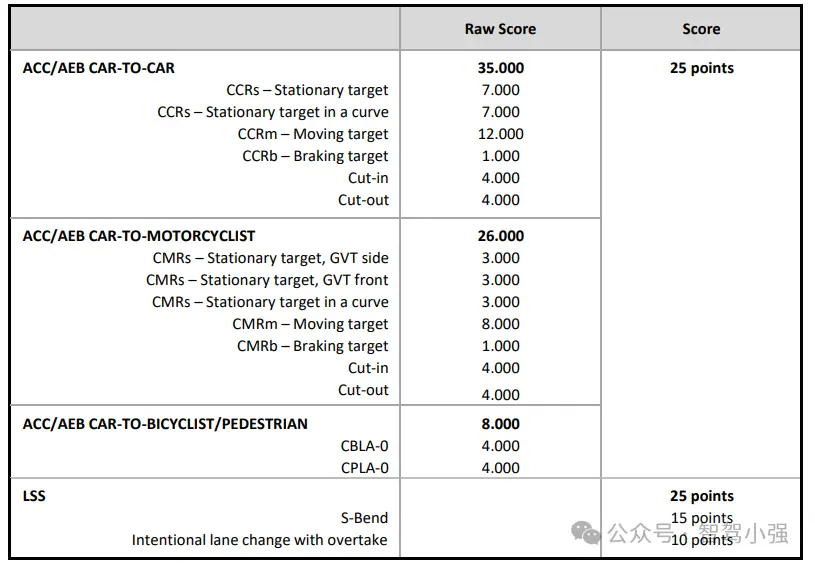
自适应巡航控制性能评估着眼于安装在车辆上的纵向辅助系统在运行期间对其他车辆的反应。对于公路和城市间辅助系统,评估汽车对汽车和汽车对摩托车的性能。
车辆制造商必须向ENCAP秘书处提供彩色数据(不需要预期碰撞速度),详细说明车辆在所有速度组合的CCRs、CCRm、CMRs和CMRm情景下的ACC性能。所有数据应在任何测试开始之前由制造商提供,最好是在交付测试车辆时。
对于CCRs、CCRm、CMRs和CMRm,评估基于OEM提供的GRID预测。测试实验室将随机选择和测试CCRs和CCRm的10个案例和CMRs和CMRm的10个案例,以验证预测,分布符合预测的颜色分布(不包括灰点)。
如果车辆制造商不提供性能数据,测试实验室将进行所有场景测试。
校正系数:制造商为CCRs、CCRm、CMRs和CMRm提供的数据使用校正系数进行缩放,该校正系数是基于执行的许多验证测试计算的。
校正系数=真实测试分数/预测分数
验证点是随机选择的网格点,分布符合预测的颜色分布(不包括灰点)。
验证测试点的实际测试总分除以这些验证测试点的预测总分。这被称为校正系数,它可以低于或高于1。
校正系数用于计算ACC性能和避碰分数的CCRs、CCRm、CMRs和CMRm分数。无论校正因子如何,最终分数都不能超过100%。
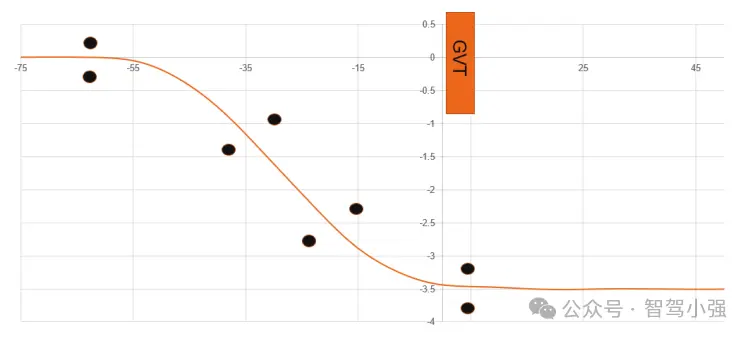
碰撞速度容差:由于测试结果在实验室和主机厂内部测试/模拟之间可能是可变的,因此对验证测试的冲击速度应用2 km/h的公差。公差在两个方向上应用,这意味着当测试点得分高于预测但在公差范围内时,将应用预测结果。
公差仅适用于验证测试验证点的预测颜色是否正确。当包括公差在内的颜色与预测不符时,将通过将实际测量的冲击速度降低与色带进行比较来确定测试点的真实颜色,而不对冲击速度降低应用公差。
ACC Car-to-Car tests:
本节仅评估ACC系统的能力,制动水平保持在大约5 m/s²以下,或者确认AEB没有干预。
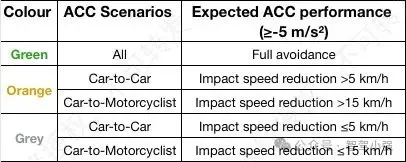
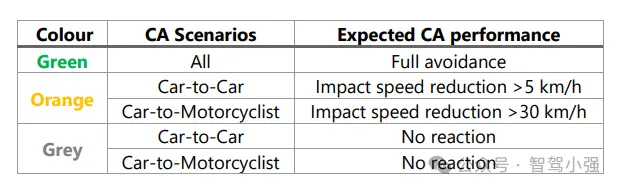
对于每种情况和测试速度,ACC完全避免碰撞的情况下(绿色)可以获得1分。在AEB介入之前,ACC介入并将冲击速度降低超过5公里/小时(黄色)的,得分为0.5分。ACC未降低超过5公里/小时(灰色)的,不予得分。
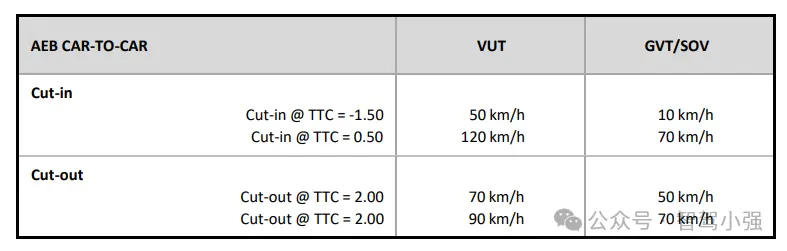
ACC汽车对汽车评估包含高速公路和城际速度驾驶时的不同场景:
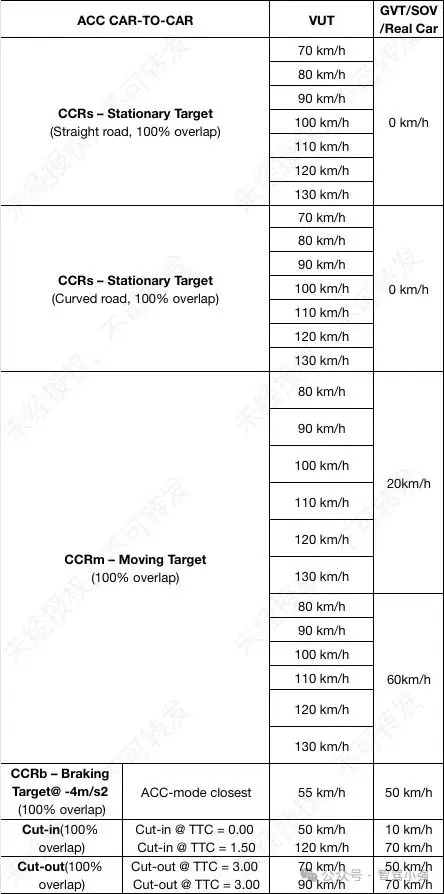
所有ACC车对车测试均按照ENCAP AEB C2C测试协议v4.3进行,但是,如果该协议中的程序偏离了AEB车对车测试协议,则应遵循辅助驾驶协议。对于每次测试,车辆应在两侧均有车道线的车道上行驶,指示的ACC速度设置为所需的测试速度(而不是GPS速度)。ACC跟车距离可设置时应设置为最近跟随距离。
应启用横向辅助装置(LKA),用于控制VUT在车道内的中间位置。ACC和横向辅助装置应在10秒TTC或250m之前激活。
在CCRm,目标车为60km/h的场景中,允许使用配备数据记录仪器的真车进行测试。
只有在绿色预测值(完全避免碰撞)的测试中,才应使用实体车辆进行测试,例如:减速水平不超过5m/s²,AEB不干预。如果VUT在TTC=[3.0s]时没有启动ACC制动,则测试应安全中止,此时使用软车GVT和大平板进行测试。
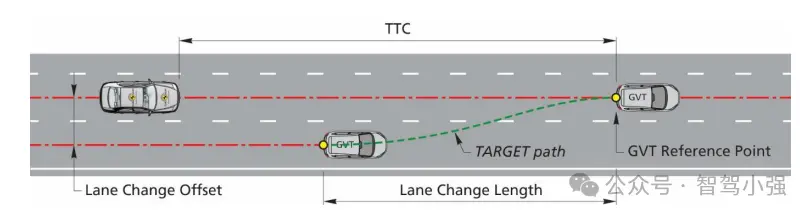
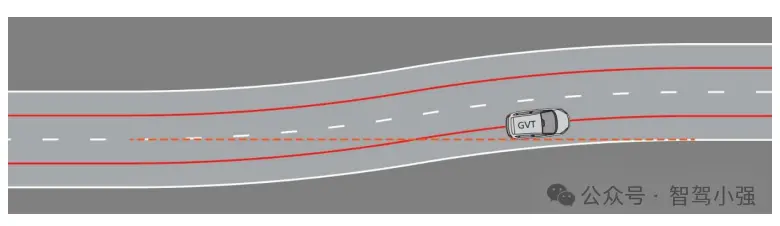
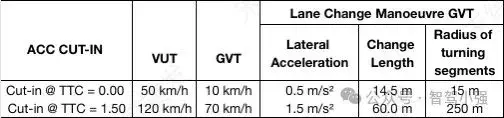
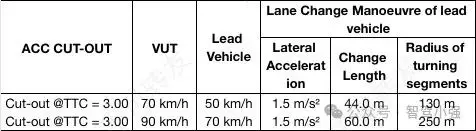
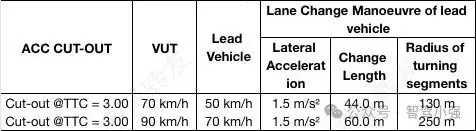
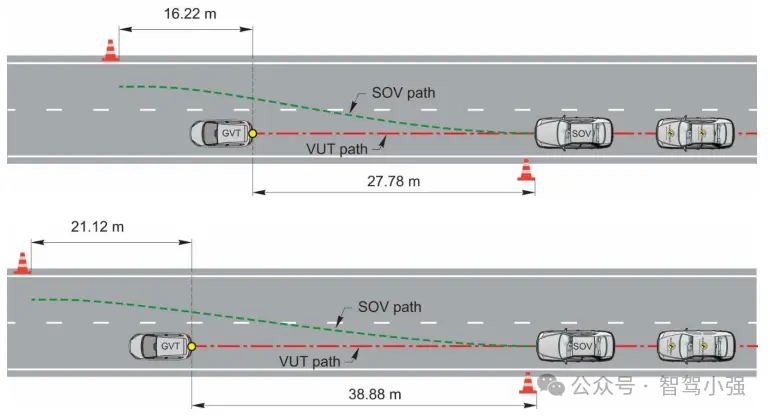
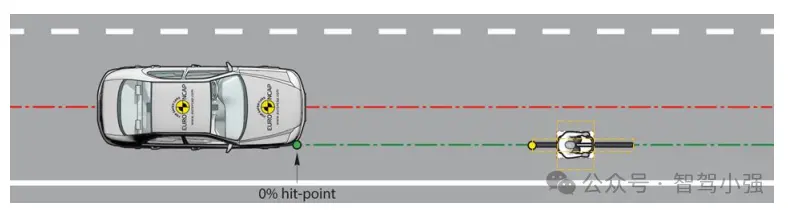
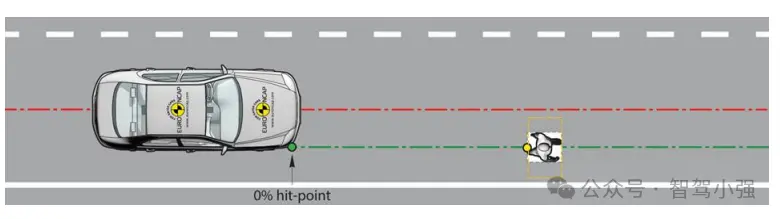
切入测试:在切入测试中,相邻车道上的GVT应向VUT的车道进行完全变道(3.5m横向偏移)。TTC定义为GVT完成变道操作时的TTC,其中GVT的后中心位于VUT行驶车道的中间。
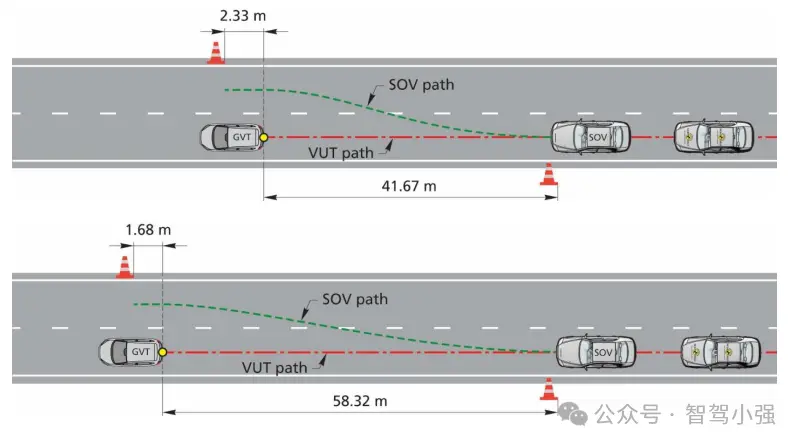
切出测试:切出测试应使用SOV进行。切出车辆(SOV)应向相邻车道进行全变道(3.5m横向偏移),以避开静止的GVT。静止GVT后面的测量指示变道开始,静止GVT前面的测量指示变道结束。指示的TTC定义为切出车辆开始变道时与GVT的TTC。SOV在操纵期间不得使用转向灯。测试实验室可以放置不同切出路径的物理标记,但不影响车辆性能。SOV路径偏差=[±0.2m]。
ACC Car-to-Motorcyclist tests:
本节仅评估ACC系统的能力,制动水平保持在大约5 m/s²以下,或者确认AEB没有干预。
对于每种情况和测试速度,如果ACC完全避免碰撞,可以获得1分。如果ACC干预并在AEB干预之前将碰撞速度降低了15公里/小时以上(相对速度>15公里/小时),则得0.5分。ACC没有降低超过15公里/小时,则不予得分。
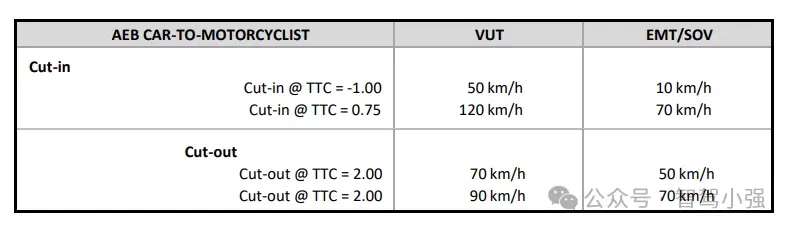
ACC汽车摩托车评估包含高速公路和城际速度驾驶时的不同场景:
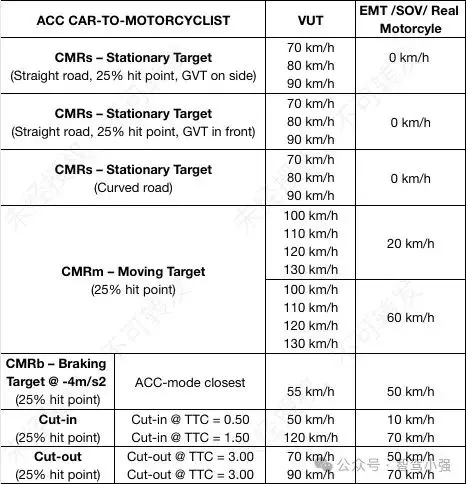
所有ACC汽车对摩托车测试均按照ENCAP-AEB LSS VRU测试协议4.5进行。如果本协议中的程序偏离了AEB LSS VRU测试协议,则应遵循本协议。对于每次测试,车辆应在两侧均有车道线的车道上行驶,测试的ACC速度为设置的表显速度(而不是GPS速度)。ACC跟车距离可设置时应设置为最近跟随距离。
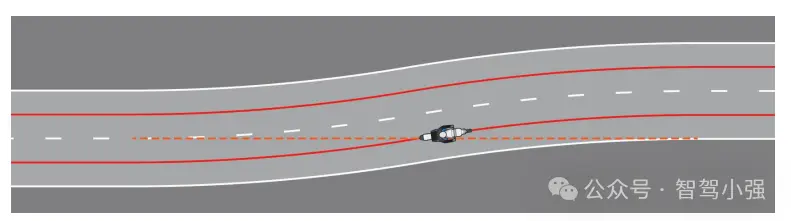
应使用横向辅助(LKA)来控制VUT在车道中间位置,ACC和横向辅助装置应在10秒TTC或相对纵向距离250m外激活
在CMRm测试用例中,EMT以60km/h的速度行驶的车市场将,允许使用带有数据记录仪器的真实摩托车。
只有在绿色预测值(完全避免碰撞)的测试中,才应使用真实摩托车进行测试,例如:减速水平不超过5m/s²,AEB不干预。如果VUT在TTC=[3.0s]时没有启动ACC制动,则测试应安全中止,此时使用EMT进行测试。
对于CMRb,测试以与CCRb相同的方式进行,但EMT位于25%的偏置点。
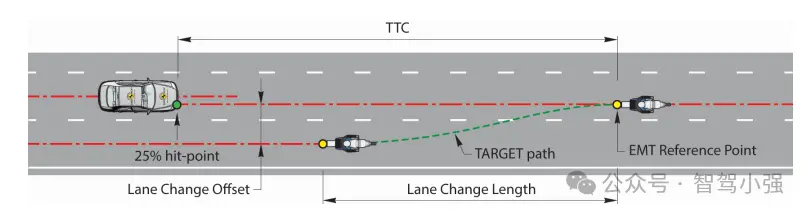
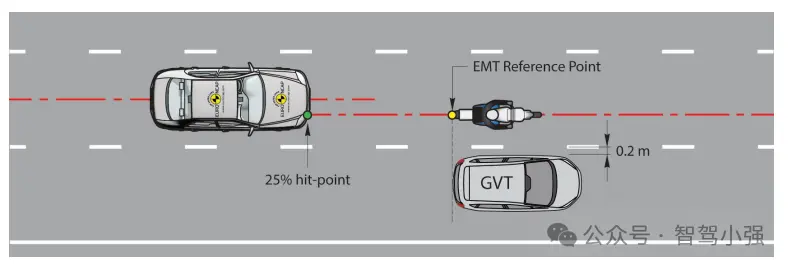
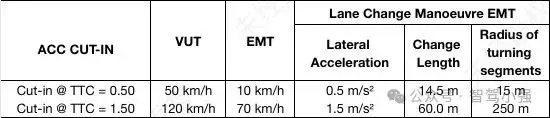
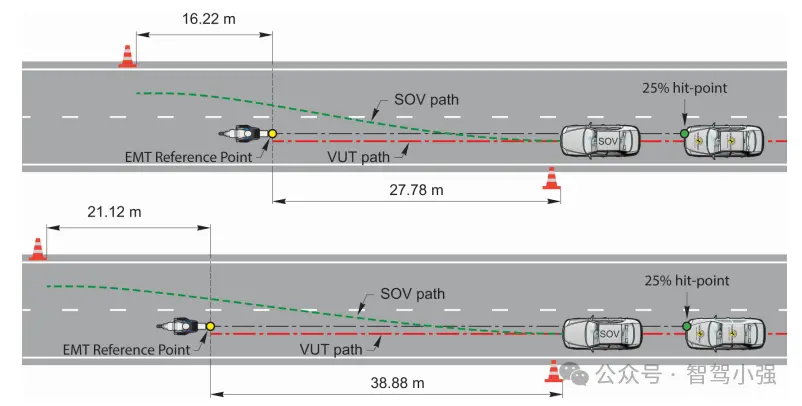
切入测试:在切入试验中,相邻车道的EMT应向VUT的车道进行部分变道(2.5m横向偏移)。指示的TTC定义为EMT完成变道机动的时间点的TTC,其中EMT的后轮处于VUT的25%碰撞点。
为了确保在不同的EMT平台上实现逼真的轨迹和足够的可重复性/再现性,在车道变换长度期间应满足以下EMT边界条件:
Path error/Lateral deviation [m]: ±0.15 路径误差/横向偏差[m]: ± 0.15
Heading/Yaw angle deviation [°]: ±2.00 航向/偏航角偏差 [°]: ±2.00
Speed deviation [km/h]: ± 0.50 速度偏差[km/h]: ±0.50
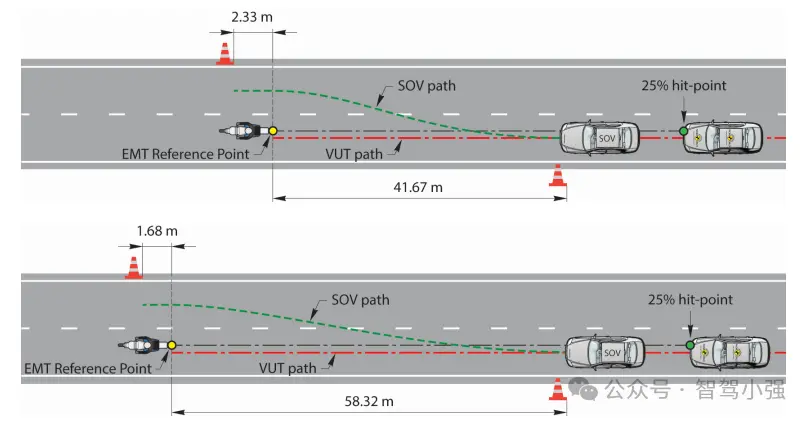
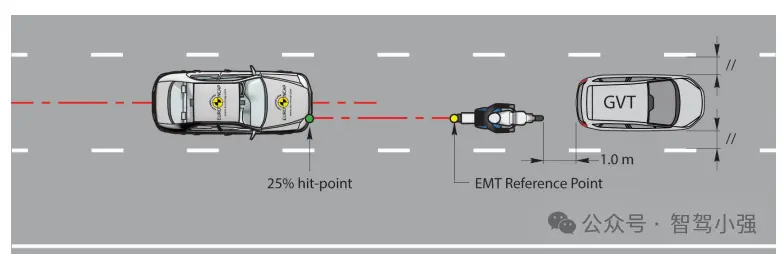
切出测试:切出测试应使用SOV进行。切出车辆(SOV)应向相邻车道进行全变道(3.5m横向偏移),以避开位于25%碰撞点的静止EMT。下图指示的TTC定义为当SOV开始变道时SOV到EMT的TTC。SOV,在边道操纵期间不得使用转向灯。测试实验室可以放置不同切出路径的物理标记,这不会影响车辆性能。SOV路径偏差=[±0.2m]。
ACC 预防错方向换道:
在大多数欧洲国家,只允许在较慢行驶车辆一侧的车道上超车。因此,在这种情况下,辅助驾驶系统不应在错误的一侧超车。对于这种基于高速公路的评估,系统可能是基于地理围栏的,OEM需要告知测试实验室系统的功能。
应使用制造商手册或提供的信息来评估系统的性能,并在可能的情况下由测试机构确认其性能。
VUT在90km/h及以上交通流中行驶时,纵向控制系统应防止VUT在该国家不正确的一侧进行超车。
注:如果相邻车道前方车辆的减速大于VUT的ACC系统的最大设计减速,则VUT可以执行错误方向的超车,这不是本测试的预期情况。
ACC 自动恢复:
这项评估着眼于车辆完全停止后恢复ACC的策略。为了有资格进行评估,VUT应能够在ACC控制下完全停止,同时保持转向辅助。
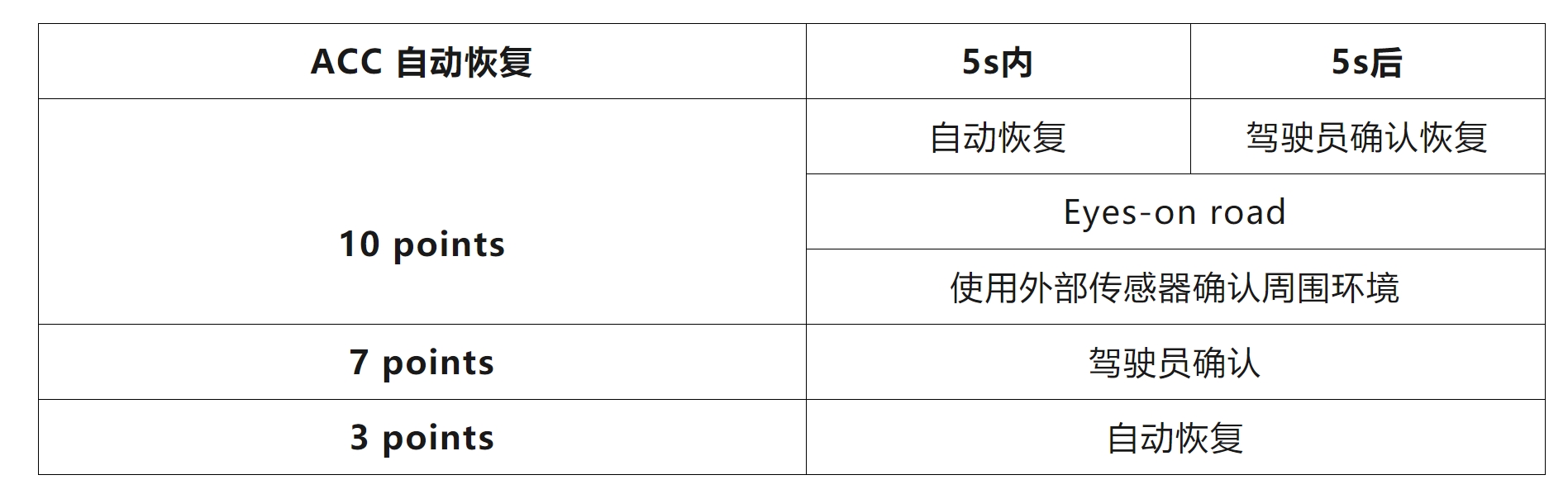
ENCAP测试实验室应根据车辆制造商提供的信息进行确认测试。如果VUT上有除下面详述的功能之外的任何可用功能,则车辆制造商应通知测试实验室如何测试此功能。
在最大保持时间内完全停止和恢复:
在两侧均有车道线的车道内驾驶车辆,跟随另一辆车以恒定的20km/h行驶。激活VUT中的纵向和横向控制系统,将跟随距离设置为最小距离,并将ACC设置为最大速度30km/h或系统的最小设置速度(如果高于30km/h)。
车辆在车道内中心并与前车保持一定距离后,逐渐使前车停下来,减速不超过[-3m/s²]
将前车保持静止的时间少于VUT的最大保持时间,然后前车恢复行驶。确认VUT按预期恢复驾驶。
在最长保持时间后完全停止并恢复:
按照上述步骤重复测试,然后将前车保持静止的时间大于VUT的最大保持时间,然后前车恢复行驶。确认VUT不会像预期的那样在没有驾驶员交互的情况下恢复驾驶。
完全停止并利用外部传感器:
如果系统利用先进的传感器(例如超声波停车传感器)来检测VUT和前车之间的障碍物,以防止例如在间隙中出现行人时,自动恢复ACC发生事故。则在前车静止到VUT最大保持时间内,使用行人假人进入前车和VUT之间的间隙进行测试,根据以下说明:
前车和VUT停止时间距1m,VUT停下来后,假人以5km/h的速度沿着VUT和前车的中心线从VUT近侧接近,并最终停在VUT的中点(50%)。
一旦假人在车辆之间静止不动,前车恢复行驶,以确认VUT不会继续撞上行人。
5秒后,假人以5km/h的速度继续横穿道路,将假人从VUT的前方移开。
在假人(或障碍物)通过后,VUT恢复驾驶时,应确认驾驶员监控系统在ACC保持时间内保持开启状态。例如,如果在恢复驾驶时如果检测到驾驶员脱手,则应在VUT达到10km/h之前开始第一次声音和视觉警告“脱手”,仅在车辆运动时监控驾驶员脱手/脱眼是不够的。

完全停止并使用驾驶员监控传感器:
如果ACC系统在保持期间利用监测驾驶员注意力来进行驾驶员监控,则通过在ACC保持期间驾驶员“脱眼”,确认VUT是否不再自动恢复跟随前车辆。
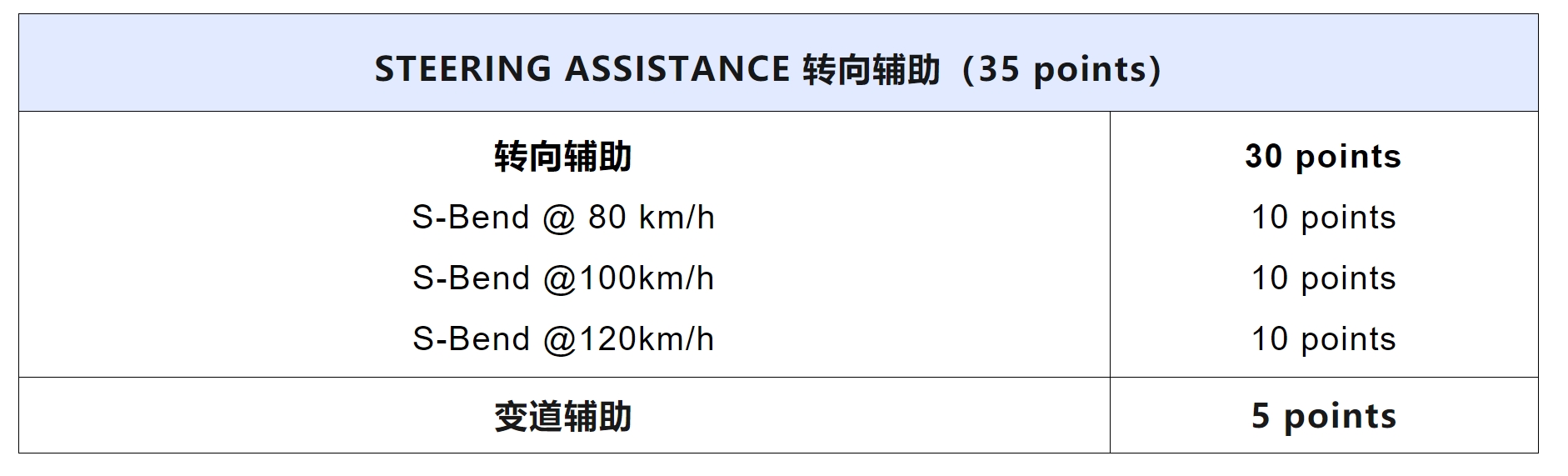
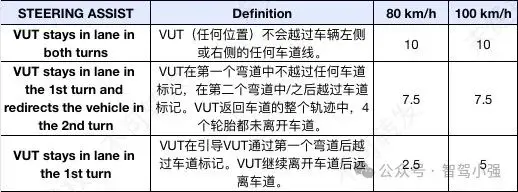
3.3 转向辅助
转向辅助功能应支持驾驶员将车辆保持在车道内,而不仅仅是在直路上。如果汽车偏离车道,则会增加碰撞风险。ENCAP不要求车辆在所有场景下都保持在车道中心,但希望车辆通过将车辆引导到正确的方向来始终支持驾驶员。ENCAP的转向辅助测试称为S-Bend。
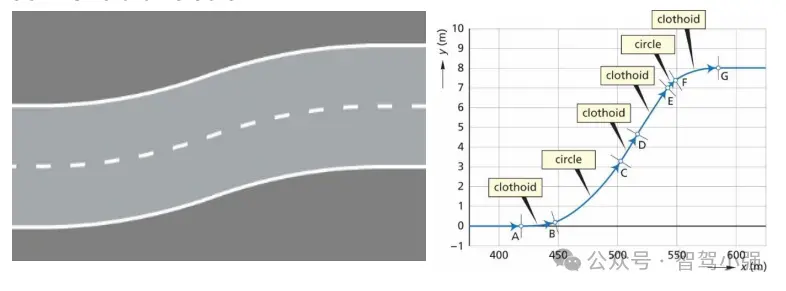
只要保持相同的几何形状,S形弯头可以与转弯方向镜像一起使用。
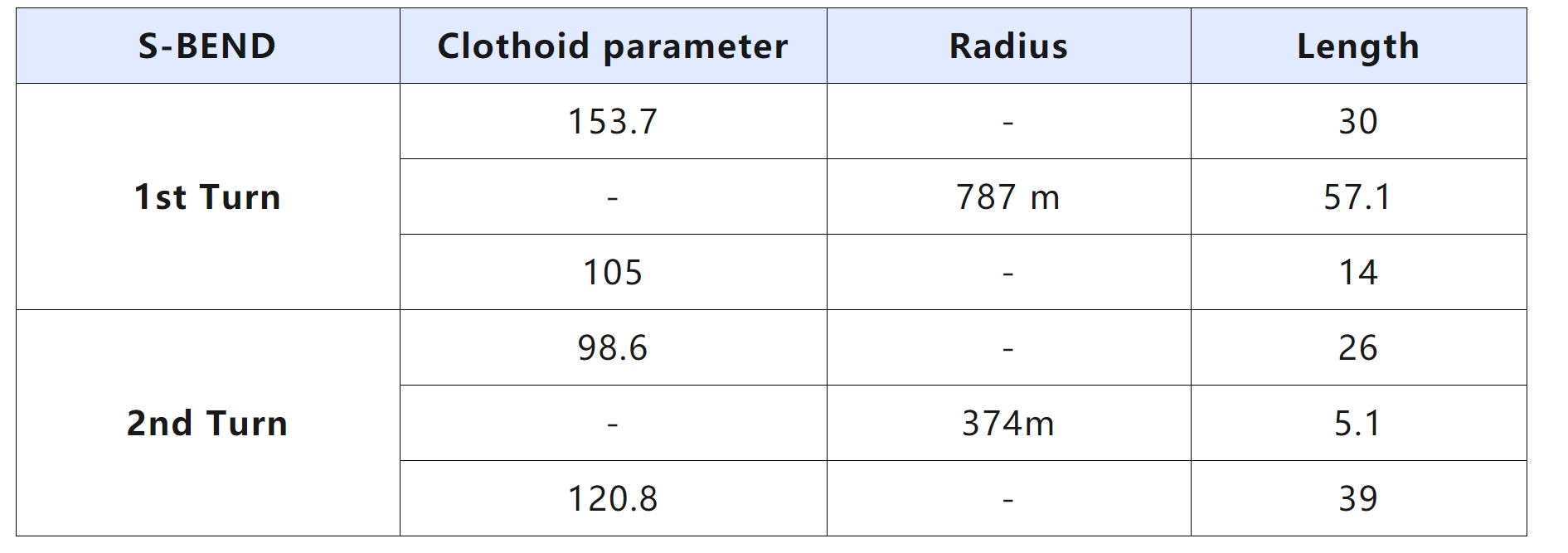
转向辅助系统的性能在80公里/小时、100公里/小时和120公里/小时的ACC指示车速下进行测试。在可能的情况下,所有其他车道支撑系统(LDP、ELKS等)应在测试期间关闭。
在进入S弯之前,车辆应在转向辅助系统开启的情况下,以恒定速度沿着两侧均有车道线的直线车道行驶足够的时间,以使转向辅助系统控制车辆保持在车道中心位置。
驾驶员应尽一切努力不向转向系统中添加任何可能影响车辆进入S弯路段后路径的输入。测试驾驶员可以将手从方向盘上移开。但是,驾驶员可能需要将手放在方向盘上或提供不同的输入,以防止系统识别出驾驶员“脱手”、“脱眼”的行为。
驾驶员应允许车辆在每次测试运行期间保持设定的连续最大ACC速度。允许车辆系统根据道路几何形状降低驱动速度,测试驾驶员不得覆盖这种速度降低(允许弯道自动减速)。如果车辆的弯道减速依赖地图信息,OEM应通知进行测试的实验室并确认合适的位置,以证明车辆可以减速并保持在车道内。
4.安全备份
安全备份得分是以下得分之和:系统故障、无响应驾驶员干预、避免碰撞。
每个小节的最大可用分数如下所示。当需要缩放原始分数时,使用两列。其中一列显示原始分数和每个场景可用分数的数量。在其旁边的列中,显示每个元素的最大缩放分数。

4.1 系统故障
在现实驾驶中,与驾驶员辅助系统相关的传感器(雷达、激光雷达或摄像头)可能会因老化、磨损、恶劣环境条件等原因而性能下降。传感器损坏或性能下降可能会导致系统不可用。系统不可用时,驾驶员要知道系统不可用的原因。
当传感器失效时,驾驶辅助系统可能会降低性能,但是驾驶辅助系统也可能内置冗余或多传感器融合,在单个传感器失效时减轻对系统性能的影响。
预测试:
由于当前系统和传感器的复杂性,车辆制造商应在进行测试之前填写一份问卷,以详细说明在提供与每个系统相关的传感器故障时系统的预期效果。
测试:
测试应在三种不同的情况下系统地评估所有单个传感器:
车辆启动时传感器遮挡。
当车辆行驶但驾驶员辅助系统未激活时,传感器遮挡。
当车辆在驾驶辅助系统处于激活状态时,传感器遮挡。
对于构成辅助系统的每个传感器,评估是相同的。然后,总分将平均分配给参与评估的所有传感器。对于涉及驾驶员辅助系统的相机传感器,应分别测试完全遮挡和半遮挡(上半视野或下半视野)。对于无法轻松确定视野的传感器位置/设计,车辆制造商可以向测试实验室建议阻挡材料的位置(即车辆制造商提供内部数据支持)。
传感器应按照技术公告进行遮挡:“TB041-AD传感器遮挡”
启动时传感器遮挡:
在VUT下电的情况下,用一种材料覆盖被测传感器,该材料应防止传感器接收信号(例如,黑色胶带遮挡摄像头、雷达吸收材料覆盖雷达)。
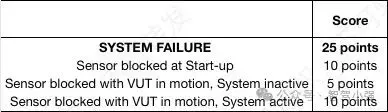
遮挡后,启动汽车并以最低速度行驶,以激活VUT手册中详细说明的辅助系统。如果在2分钟的驾驶后无法启动辅助系统,则VUT得分为8分,如果在驾驶后5分钟内显示视觉警告,则有资格再获得2分。如果此时可以激活控制系统,则VUT得分为0分。
VUT运动中,辅助驾驶系统未激活,传感器遮挡:
驾驶VUT,以高于辅助驾驶系统最低激活速度[或30km/h,两者取低]1分钟。然后,在不低于此速度的情况下,用上述测试中使用的相同材料覆盖传感器,并在2分钟后尝试系统激活。
如果辅助驾驶系统无法启动,则VUT得分为4分,如果在此激活尝试后驾驶超过最低速度后5分钟内显示视觉警告,则有资格再得1分。如果此时可以激活辅助系统,则VUT得分为0分。
VUT运动中,辅助驾驶系统激活,传感器遮挡:
在辅助系统启动的情况下,以辅助驾驶系统的最低设计速度[或30km/h,以最低者为准]驱动VUT。然后,在辅助驾驶系统开启的情况下,用上述测试中使用的相同材料覆盖传感器。
如果系统在材料覆盖传感器后2分钟内退出,则VUT得分8分,如果在传感器覆盖后的5分钟内显示视觉警告,则有资格再得2分。系统未在2分钟内退出将得分0分。
如果OEM已经声明,当传感器被遮挡时,辅助驾驶系统性能没有损失,那么,在传感器被覆盖的情况下,实验室应通过重复以下内容来确认这一点:
VUT在传感器被遮挡的情况下,测试ACC最高速度下CCRs是否能避撞,以此来验证主机厂声明的对纵向控制没有影响。
VUT在传感器被遮挡的情况下,测试横向辅助的最高速度下是否仍能保持在车道内,以此来验证主机厂声明的对横向控制没有影响。如果车辆没有保持在车道内,请重复80km/h的测试,并接受不大于0.25m的偏离。
如果OEM的声明被测试确认,VUT将为该传感器得分20分。然后,它应向驾驶员提供传感器已被遮挡的视觉信息,这可以在任何时候,但应不迟于点火循环定义的下一次驾驶开始时显示,视觉信息的显示为VUT为该传感器额外得分5分,并将其添加到传感器遮挡的总分方程中。
如果VUT未通过确认测试,则该传感器得分为0分。
4.2 无响应驾驶员干预(RMF)
该评估旨在测试车辆对在一连串警告和试图重新唤醒驾驶员后仍无反应的驾驶员的最终反应。该测试可以与驾驶员监控评估同时运行。
这些系统可能会被地理围栏围住,只能在高速公路上工作,允许在高速公路上测试。
该测试应在至少两车道的直线道路上进行,长度应足够长。最近侧车道应具有实心白线,并有足够的空间在行驶车道侧面设置安全港(硬肩或应急车道)。
安装摄像头以至少监控车辆的仪表,建议安装至少一个额外的摄像头监控内部/驾驶舱。
80km/h测试:
让系统将VUT保持在车道中心位置,然后“脱手”。为了方便视频回看,需要使用触发器,例如在脱手的那一刻说出短语“手离开”。
在直接DSM系统能够将驾驶员分类为无响应的情况下,遵循TB039中概述的测试执行(具有适应于特定DSM系统策略的特定规定)。
车辆完全停了下来。
警告升级结束。
纵向和转向辅助系统均关闭。
如果汽车没有反应,测试驾驶员必须在测试车道的尽头安全停车。
保持转向控制,并将车辆带到“安全港”或稳定停车将获得20分。
额外的5分保留给更高级的响应:
向最慢车道(1条车道)方向变道:+3分
变道至最慢车道(最多2条车道):+4分
变道为紧急车道(或故障点):+5分
4.3 避免碰撞
碰撞避免评估的目的是仅评估安装在车辆上的纵向辅助系统在操作期间对其他道路使用者的反应,尽管在无法通过制动避免的关键情况下,也允许通过车道内转向机动进行避免。在典型的高速公路和城市间情况下行驶时,应评估系统的性能。“碰撞避免”评估将查看车辆使用辅助驾驶系统和应急系统(AEB)相结合避免汽车与汽车、汽车与摩托车手、汽车与自行车手和汽车与行人碰撞的能力。
车辆制造商需要向ENCAP秘书处提供彩色数据,详细说明车辆在所有速度组合的CCRs、CCRm、CMRs和CMRm方案中的性能。此外,应提供TTC中预期的FCW时间。所有数据应在测试开始前由制造商提供,最好在测试车辆交付时提供。
对于CCRs、CCRm、CMRs和CMRm,评估是基于OEM提供的GRID预测。对于这些情况,要测试以验证预测的实际场景将是为ACC性能选择的相同场景。
如果车辆制造商不提供性能数据,测试实验室将进行所有场景。
车对车:
对于每种情况和测试速度,如果ACC和/或AEB完全避免碰撞,则可以获得1分。如果ACC和/或AEB介入并将碰撞速度降低超过5公里/小时,则得分为0.5分。如果ACC和/或AEB系统没有避免碰撞,但在TTC>1.5秒时发出FCW,则该情景额外获得0.25分。
如果OEM能够证明或证明ACC和/或AEB干预并将冲击速度降低5公里/小时以上,则得0.5分。
对于CCRs、CCRm和CCRb,使用与ACC性能评估相同的测试速度。对于切入和切出,使用额外和更关键的设置来验证安全备份。
切出测试:
安全备份后的附加切出测试也应使用实车进行,但前车的切出TTC应为2秒,而不是ACC性能中的3秒。
汽车对摩托车:
对于每种情况和测试速度,如果ACC和/或AEB完全避免碰撞,可以获得1分。如果ACC和/或AEB干预并将碰撞速度降低30km/h以上(相对速度>30km/h的场景),则得0.5分。如果ACC和/或AEB系统没有避免碰撞,但在TTC>1.5秒时发出FCW,则该情景额外获得0.25分。
如果OEM能够证明或证明ACC和/或AEB干预并将冲击速度降低30km/h以上(相对速度>30km/h的场景),则得0.5分。
对于CMRs、CMRm和CMRb,使用与ACC性能评估相同的测试速度。对于切入和切出,使用额外和更严苛的设置来验证安全备份。为切入定义的EMT边界条件与ACC性能评估中的相同。
切出测试:
安全备份后的附加切出测试也应使用实车进行,但前车的切出TTC应为2秒,而不是ACC性能中的3秒。
车对自行车:
汽车对自行车手评估的目的是评估安装在车辆上的纵向辅助系统如何对沿同一方向行驶并靠近道路边缘的自行车做出反应,尽管在无法通过制动避免的关键情况下,也允许通过车道内转向机动进行避免。该评估考虑了车辆避免碰撞的能力,使用辅助驾驶系统和应急系统(AEBS)相结合。自行车手目标(EBTa)应位于0%的碰撞点位置,如下图所示:
对于每个场景和测试速度,如果ACC和/或AEB/AES完全避免碰撞,则可以获得1分。如果ACC和/或AEB系统没有避免碰撞,但在TTC>1.5秒时发出FCW,则该场景额外获得0.25分。

对于较高的相对速度的测试场景,如果辅助驾驶系统与驾驶员注意力监测关联,当驾驶员注意力不集中或反应迟钝时,允许车辆制造商实施早期ACC减速策略。
车对行人:
车辆对行人评估的目的是评估安装在车辆上的纵向辅助系统如何对行驶在同一方向且靠近道路边缘的行人做出反应,尽管在无法通过制动避免的关键情况下,也允许通过车道内转向机动进行避免。该评估着眼于车辆避免碰撞的能力,同时使用辅助驾驶系统和应急系统。行人目标(EPTa)应位于下图所示的0%撞击点位置。
对于每个场景和测试速度,如果ACC和/或AEB/AES完全避免碰撞,则可以获得1分。如果ACC和/或AEB系统没有避免碰撞,但在TTC>1.5秒时发出FCW,则该场景额外获得0.25分。
对于较高的相对速度的测试场景,如果辅助驾驶系统与驾驶员注意力监测关联,当驾驶员注意力不集中或反应迟钝时,允许车辆制造商实施早期ACC减速策略。
车道辅助系统-S弯:
车道辅助系统-S弯设计用于确定车辆在弯曲路段上保持车道或提醒驾驶员车道偏离的能力,使用AD系统和紧急LSS系统,如ELK、LKA和LDW。
对于在转向辅助测试期间车辆未保持在车道内的每个测试速度,在打开所有附加LSS系统的情况下,按照转向辅助重复测试。
如果LSS干预使VUT越过车道标记不超过0.4m,则得5分。如果系统没有干预,但在车辆离开车道超过0.3m之前提供了听觉或触觉LDW,则得2.5分。
车道辅助系统-换道超车:
碰撞避免系统的变道部分是评估车辆阻止车辆变道进入相邻车道行驶的能力。在这种情况下,ELK系统和盲点监测(带有主动扭矩系统,作为驾驶员辅助包的一部分)都被认为是有益的,可以改变车辆的行驶方向以防止碰撞。
所有汽车对汽车和汽车对摩托车手的有意车道变更都将执行ENCAP LSS测试协议v4.2和ENCAP AEB LSS VRU测试协议-v4.5的超车测试。如果车辆已经由ENCAP评估,这些结果可能会根据ENCAP测试的车辆的装配而延续。由于更高的装配导致性能与ENCAP安全评估中评估的车辆不同,这可能需要与AD车辆重新测试。
故意变道测试总共可获得10分:汽车对汽车得5分,汽车对摩托车手得5分。
延伸阅读







最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
