




 广告
广告





















































压电型加速度传感器技术手册5

5.相位特性
加速度传感器内部的质量块对于基座的相位一直是滞后的。此时的滞后时间Δt和相位角φ的关系式如下,
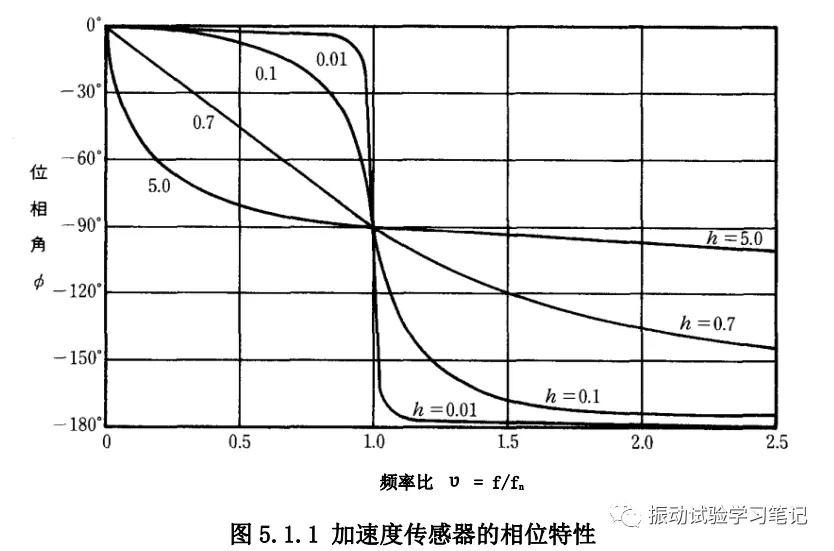
上式中可以明显看出相位特性由衰减比h决定,滞后时间由相位角和频率决定。图5.1.1针对不同衰减比h,相位角和频率比的关系曲线图。
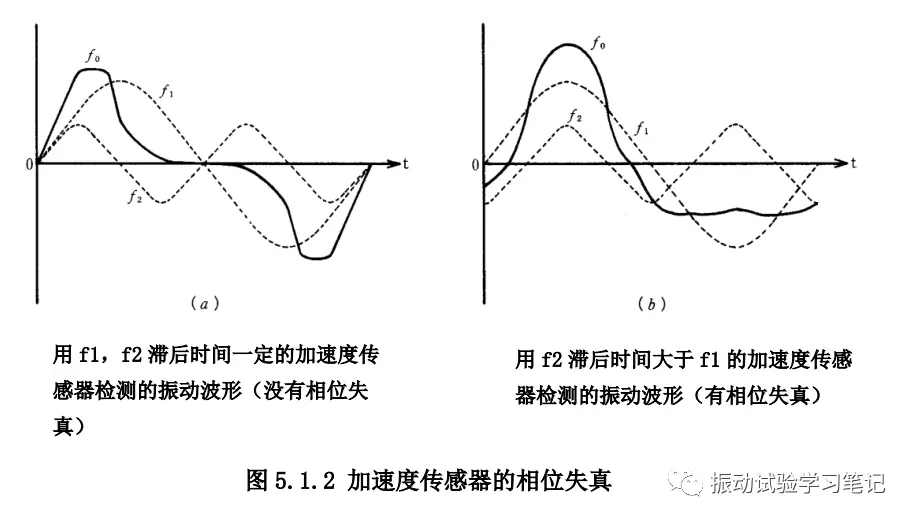
单一频率的振动检测场合,相位特性一般没有什么问题,不同频率成分合成的振动波形或冲击振动检测等场合,相位特性特别重要。因为,各频率成分的滞后时间Δt不同会产生相位失真。
为了使相位失真影响最低,可以①尽可能使滞后时间Δt变小,也就是让加速度传感器的衰减比h尽可能小;②相位失真对频率的滞后时间一定,即衰减比h在0.7前后,其对频率的滞后时间成比例关系。
对于一般的压电型加速度传感器,可以通过以上两种方法解决相位失真的问题。尽量确保衰减比h<0.01,这样共振产生的频率带域就相对来说比较狭窄(参照式4.1.5)。

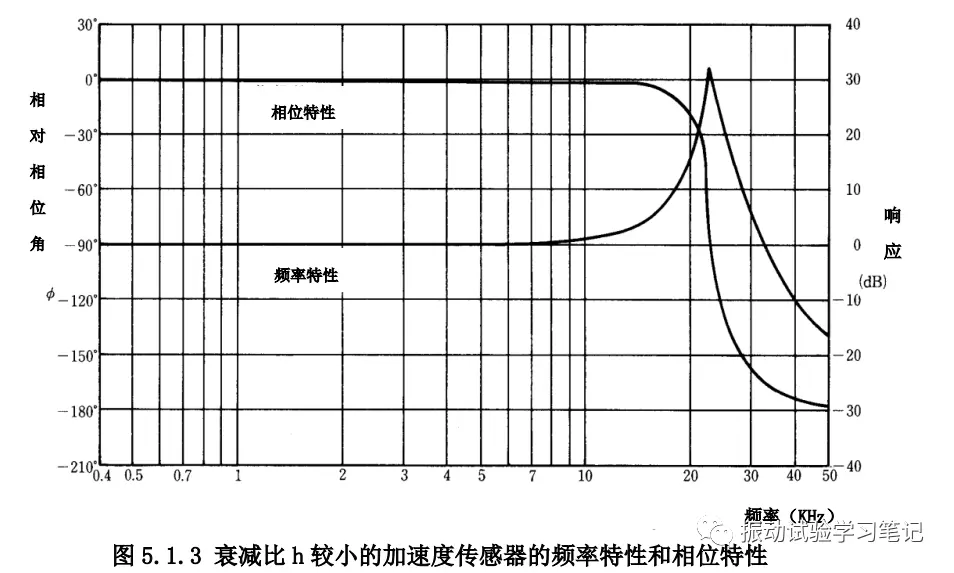
图中可以看出,在远远低于共振频率的频域带,加速度传感器的弹性质量系基本上没有相位变化,对于振动检测是没有问题的。但是,在靠近共振点前,相位开始慢慢偏移,时间越长变化越大。在共振点处,将近慢了90度,振动中含有此附近频率成分的波形发生相位失真。
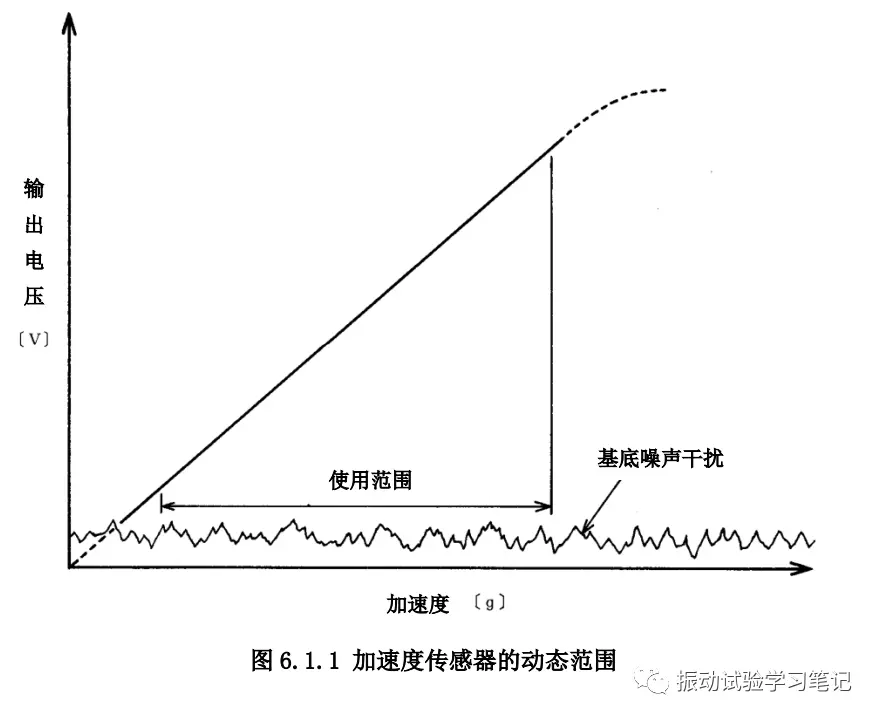
6. 动态范围和直线性
加速度传感器的基座受到的加速度和输出电压直接比例范围称为动态范围。
压电型加速度传感器的动态范围很宽,理论上满足下限可以到零,上限可达到1000g的直线性范围。但实际上,下限的话,由于加速度传感器输出为零前会受到检测系放大器的干扰或其他外来干扰的影响,因此,在低量级振动检测时,保证测量系统高S/N比非常重要。可测量的最大加速度在产品目录中会有记载,每个加速度传感器的种类不同,对应大小各异。这主要由加速度传感器的构造、压电体的机械强度、弹性质量系的预载能力等决定。
一般,高量级的振动检测适用负载质量小的小型加速度传感器。产品目录中记载的最大加速度对应的是主轴方向,横向的话,只要在其范围内也没有问题。但是,如果是在接触共振频率附近高量级连续振动或冲击的场合,由于共振产生异常振动超出最大加速度,可能会导致加速度传感器破损。比如,加速度传感器从20cm高度掉落在桌面上,大概有1000g左右的加速度,1m高度掉落在混凝土的地面上,大概有数千到数万g的冲击加速度发生,所以在使用中要尽量注意。
放大器内藏型的,由内藏的放大器最大输出电压决定。内藏放大器的输入输出直线范围上限为动态范围的上限。比如,直线范围上限3V的内藏放大器场合,100mV/g的加速度传感器为正负15g,10mv/g的加速度传感器为正负150g。
- 下一篇:压电型加速度传感器技术手册6
- 上一篇:压电型加速度传感器技术手册4







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
