




 广告
广告





















































压电型加速度传感器技术手册6

7. 过渡响应
7.1 零点偏移(zero shift)
冲击波形检测场合,测量系统的低频特性非常重要,所谓低频特性就是指冲击波形的脉宽T和测量系统的输入部时间常数τ之比。
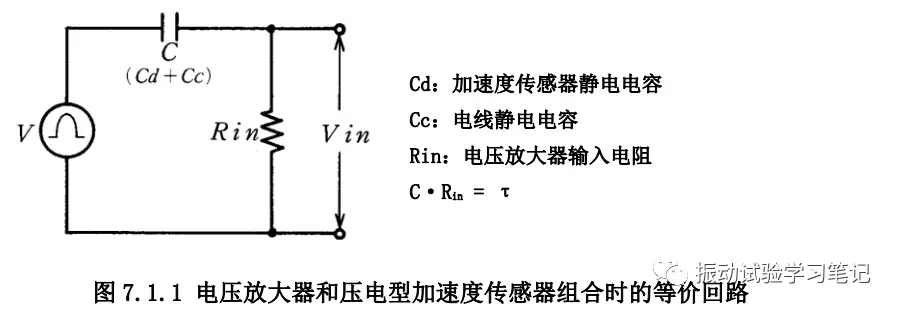
上图中的输入等价回路,可以看成时间常数为τ=CRin的高通滤波器。对于脉宽T,当时间常数τ足够大时,检测的时候就不会产生误差,τ太小的话,对于脉宽T就没有办法维持峰值,会像指数函数式的衰减。
现在举例,将单发半正弦波及单发矩形波施加到图7.1.1的回路,来看一下其响应特性。
首先,施加单发半正弦波的场合,任意的瞬时值可以通过下式表示,
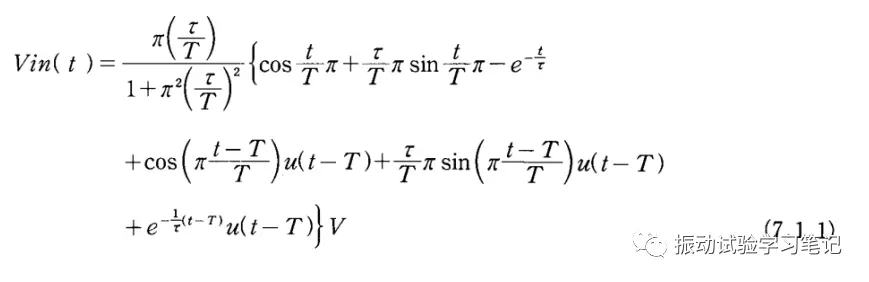
式7.1.1中代表性的时间常数进行图像化,就可以得到如图7.1.2(a)。图中可以发现τ/T比值越小,峰值的误差越大。想将峰值误差控制在5%以下,则需要τ/T≥7,2%以下的话,需要τ/T≥16。
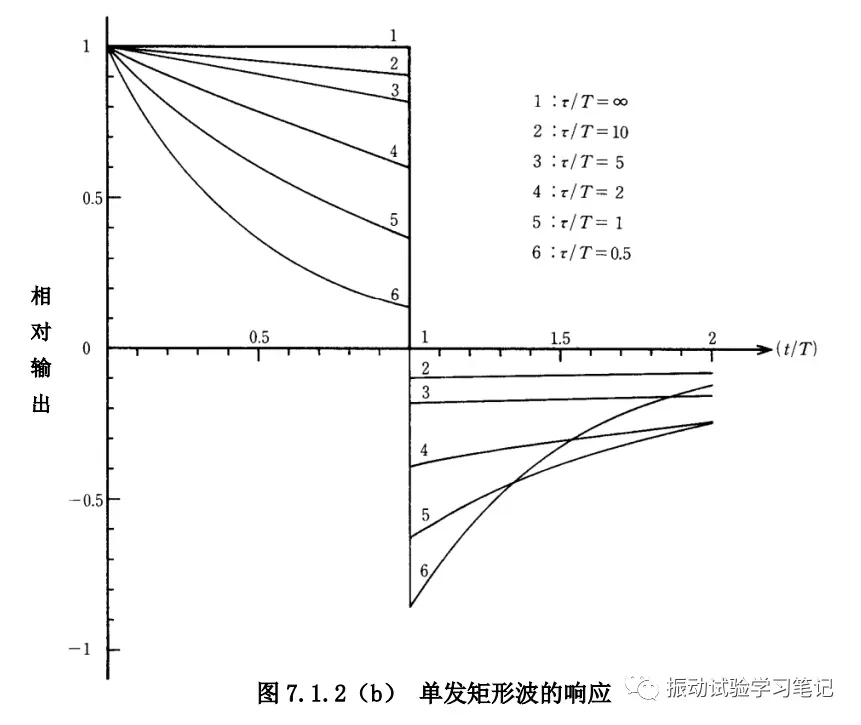
再来看看施加单发矩形波的场合,任意的瞬时值为,

时间常数进行图像化后,得到图7.1.2(b), 想将峰值误差控制在5%以下,则需要τ/T≥20,2%以下的话,需要τ/T≥50。
另外,在使用电荷放大器的场合,检测系统的低频特性仅由电荷放大器决定。时间常数为反馈电容Cf和反馈电阻Rf的积,即τ=CfRf。
举例说明,T=50ms的单发半正弦波的冲击波形峰值需要满足测定精度2%。检测系统的输入部电容(传感器本体电容+电线电容+放大器输入电容)为1500pF的电压放大器,τ/T≥16,则输入电阻,
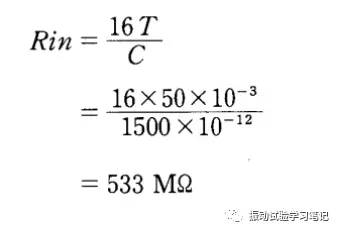
若放大器的输入电阻为100MΩ的话,则
8000-1500=6500pF的静电电容需要增加,或者,延长电线且满足增加这么多电容容量。但是,加速度传感器的输出电压Vs则相对变小,参考下式7.1.3。

使用内藏型加速度传感器的场合,低频截止频率为ωc,输入的时间常数τ可以通过下式求得。

7.2 振荡干扰(ringing)
一般的压电型加速度传感器在制作的时候都会使衰减比h尽可能的小,即h<0.01。因此,当受到冲击的时候,传感器的固有共振频率会受到激励,从而在冲击原波形上叠加上共振波形,这种现象称为振荡干扰。上述的零点偏移属于加速度传感器的低频特性,而振荡干扰则属于其高频特性。
振荡的振幅大小取决于冲击波形的脉宽T和加速度传感器的固有共振频率的周期Tn之比,即Tn/T。

图中可以看出,各种衰减比为h的代表性单发半正弦波在不同Tn/T比值下的振荡干扰。Tn/T值越小,振荡干扰的波形越小,即误差越小。
为了减少振荡干扰,有必要使用固有共振频率较高的加速度传感器。单发半正弦波及单发三角波的冲击试验,将峰值误差控制在10%以内的话,需要加速度传感器的固有共振频率对应的周期Tn在T的1/5以下;5%以内的话,需要控制在T的1/10以下。比如,测量脉宽200μs的冲击波将其峰值误差控制在10%以内,则需要控制加速度传感器的周期Tn在40μs以下,即固有共振频率需要在25KHz以上。误差控制在5%以内的话,需要50KHz以上。但是,冲击波形完整的半正弦波或三角波,按照此方法是可行的,冲击波形歪斜失真的场合,由于含有高次谐波成分可能使加速度传感器的固有共振频率异常激励起来,所以还是选择固有共振频率高且余量多一点为好。
减少振荡干扰的另一种方法,可使用截止频率约为振荡频率即加速度传感器固有共振频率一半的12dB/oct或18dB/oct低通滤波器,将其衰减。
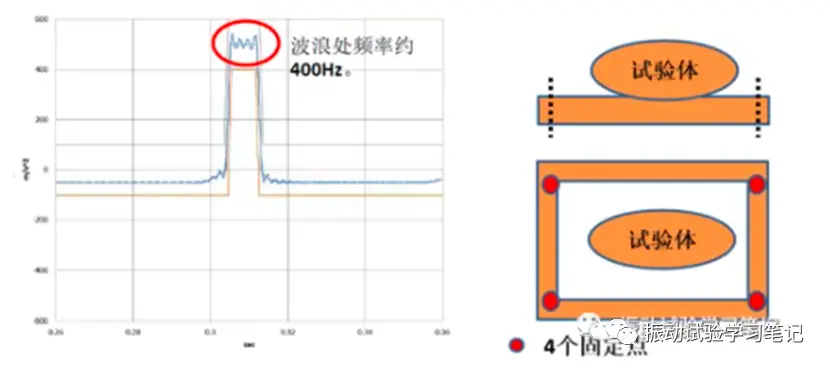
以前在案例分析的文章中分析过冲击台型波形上面有干扰波形,见下图。不知道读者是否还记得,当初分析的一种原因是试验体的共振干扰,其实上面这种可能性也是有的,尤其是发生在新手身上。可见,还是那句话,振动的水很深!!!
- 下一篇:压电型加速度传感器技术手册7
- 上一篇:压电型加速度传感器技术手册5







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
