




 广告
广告





















































规程解读丨C-NCAP管理规则(2024年版)附录O VRU保护--AEB VRU试验规程解读

随着全球汽车保有量的增加和城市化进程的加快,道路交通安全问题日益严峻,特别是弱势道路使用者(VRU)在交通事故中面临的高风险,促使汽车行业加强对VRU保护技术的研发。自动紧急制动系统(AEB)作为关键的安全技术,其在识别和响应VRU方面的性能成为关注焦点。在此背景下,2024 年 7 月 1 日起正式实施的《C-NCAP 管理规则(2024年版)》将AEB VRU试验规程从主动安全ADAS试验板块里抽离出来作为VRU保护的重要部分,并以独立附录形式发布。
自动紧急制动系统车对弱势交通参与者(AEB VRU)功能能够实时监测车辆前方行驶环境,并在可能与成人、儿童、电动自行车、踏板式摩托车等目标发生碰撞危险时自动启动车辆制动系统使车辆减速,以避免碰撞或减轻碰撞后果。
AEB VRU试验规程要求配置AEB VRU系统的车型要开展自动紧急制动系统车对行人(AEB VRU_Ped)以及自动紧急制动系统车对二轮车(AEB VRU_TW)的测试,检验被测车辆在没有人为干预的情况下的制动及预警情况。根据不同场景和测试速度点,并依据是否碰撞、碰撞速度和报警时机等进行加权评分,对测试车辆的AEB系统的性能进行综合评价。
《C-NCAP 管理规则(2024 年版)》的VRU 自动紧急制动(AEB VRU)系统试验在 2021 版基础上新增了交叉路口场景,且对原有场景做了优化,更新了测试参数,增加了大量转弯及障碍物遮挡场景并引入了符合中国交通特征的电动自行车目标物。针对所有目标物横穿的场景,增加了障碍车的遮挡, 以模拟我们日常驾驶中担忧的“鬼探头”危险场景。无论是障碍车遮挡,还是车辆转弯场景,都无疑对测试车辆的识别和反应能力提出了更高的要求。
中汽研科技有限公司 平台总监周建华:“相较于2021版CNCAP,2024版AEB VRU系统试验的每个单项测试的速度点普遍减少,但场景设置却更为丰富全面,且更贴近中国实际交通道路情况,测试难度明显增加。”
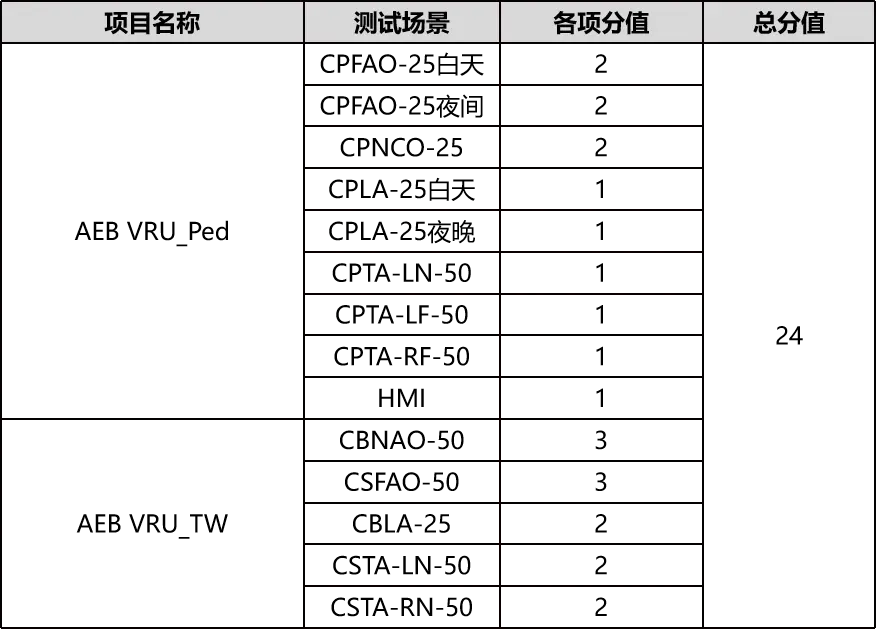
AEB VRU 测试部分可获得的最高总分值为 24 分,其中AEB VRU_Ped和AEB VRU_TW两大类各占50%。各测试场景最高分值如下图所示:
01 行人自动紧急制动系统(AEB VRU_Ped)测试
AEB VRU_Ped测试部分最高分值为12分,场景包括目标物横穿、纵向追尾、VUT转弯以及部分夜间场景,并新引入了PTC儿童行人目标物。
PTA/PTC外观图
具体场景为车辆直行与前方纵向行走的行人测试场景(CPLA)、车辆直行与前方近端被遮挡的穿行的儿童测试场景(CPNCO)、车辆直行与前方远端被遮挡的穿行的行人测试场景(CPFAO)、车辆左转与前方近端穿行的行人测试场景(CPTA-LN)、 车辆左转与前方远端穿行的行人测试场景(CPTA-LF)以及车辆右转与前方远端穿行的行人测试场景(CPTA-RF)。
1 车辆直行与前方纵向行走的行人测试场景(CPLA)
CPLA 场景下,行人以 5km/h 的速度以与车辆行驶方向相同的方向移动。VUT 分别以 20~ 80km/h 的速度测试,其中 20km/h、40km/h 测试AEB功能,考验车辆在无驾驶员介入情况下的紧急制动能力;60km/h、80km/h 测试FCW 功能,考验车辆在有驾驶员介入情况下的紧急制动能力,碰撞位置都在25%处。
CPLA 测试场景分别进行白天和夜晚测试,在夜晚测试时,无路灯辅助照明, VUT 开启近光灯。且新版夜间场景,要求在对向车道中间距离碰撞点0m处,停放障碍车,并开启近光灯。
该场景主要考察车辆系统对前方移动行人的感知和执行能力,且测试环境覆盖白天和夜间,对系统全天候的感知能力提出了较高的要求。
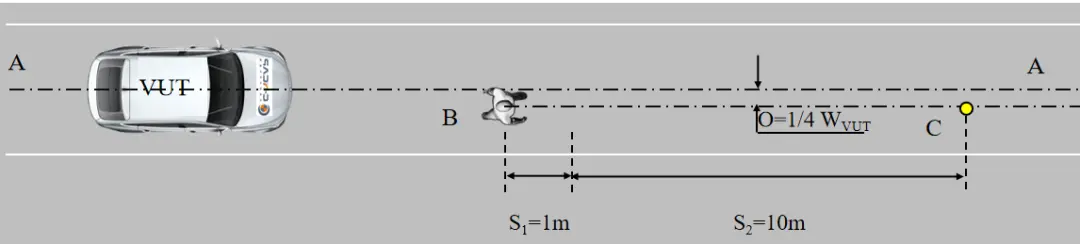
CPLA-25 白天测试场景示意图
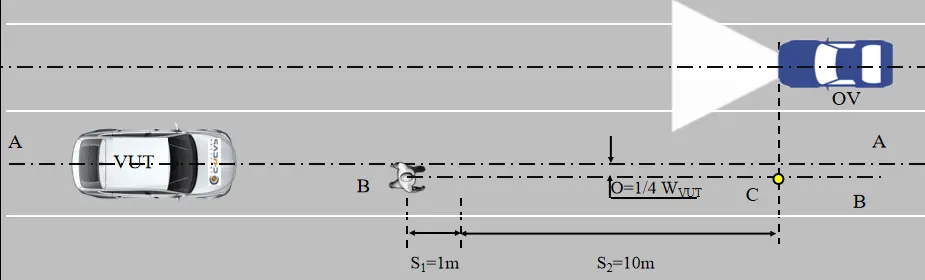
CPLA-25 夜间测试场景示意图
2 车辆直行与前方近端被遮挡的穿行的儿童测试场景(CPNCO)
CPNCO 场景下,儿童以 5km/h 的速度以与车辆行驶方向垂直的方向移动。VUT 分别以 20km/h、40km/h 和 60km/h 的速度测试。碰撞位置在25%处。
该场景为新增场景,难度较高,主要考察车辆系统对于近端横穿儿童目标物的识别和目标物运动轨迹的判断能力,由于障碍车的存在,导致目标物在到碰撞点前,会消失在试验车的“视野”内一段时间,再加上儿童目标物尺寸本身较小且从近端出现,对车辆的感知和响应能力要求更高。特别对于高速测试点,留给车辆系统的反应时间很少,难度较大。
CPNCO 测试场景示意图
3 车辆直行与前方远端被遮挡的穿行的行人测试场景(CPFAO)
CPFAO 场景下,行人以 6.5km/h 的速度以与车辆行驶方向垂直的方向移动。VUT 分别以 20km/h、40km/h 和 60km/h 的速度测试。碰撞位置在25%处。
该场景主要考察车辆系统对于远端横穿成人目标物的识别和反应能力,障碍车的存在以及夜间测试的光照条件加大了此场景的测试难度。但相比于CPNCO,成人目标物尺寸较大,且障碍车摆放位置离VUT路径相对较远,留给车辆系统的反应时间相对较长,但仍充满挑战性。
CPFAO 测试场景示意图
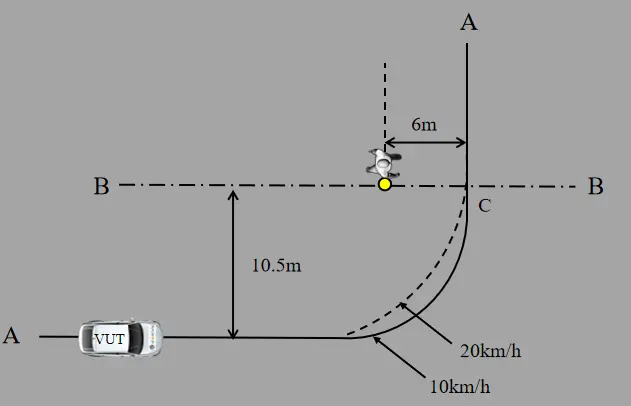
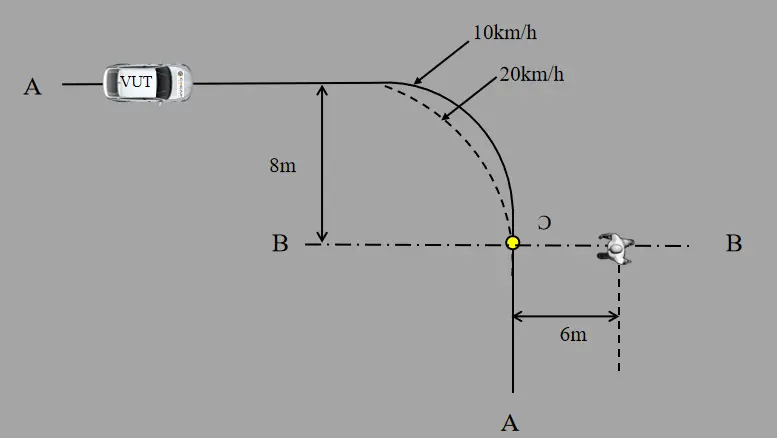
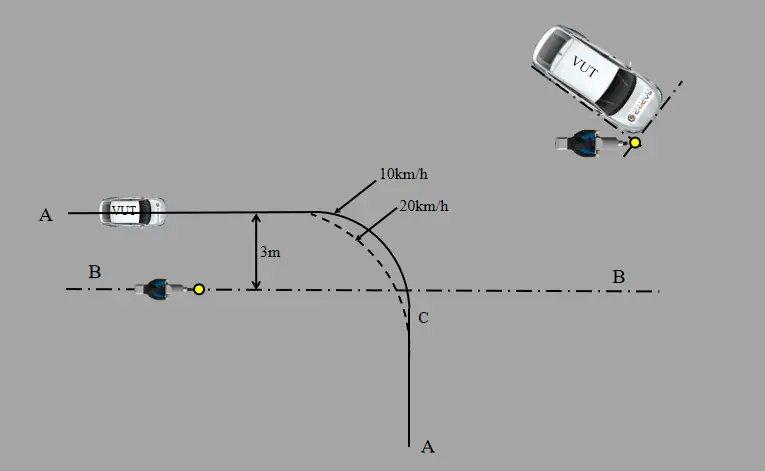
4 车辆左转与前方近端穿行的行人测试场景(CPTA-LN)
CPTA-LN 场景下,行人以 5km/h 的速度自相对车辆行驶方向的右侧向左侧移动。VUT 分别以 10km/h、20km/h、30km/h 的速度左转测试。碰撞位置在 50%处。
该场景主要考察车辆系统在左转弯过程中,对近端穿行行人的识别及响应能力。
CPTA-LN 测试场景示意图
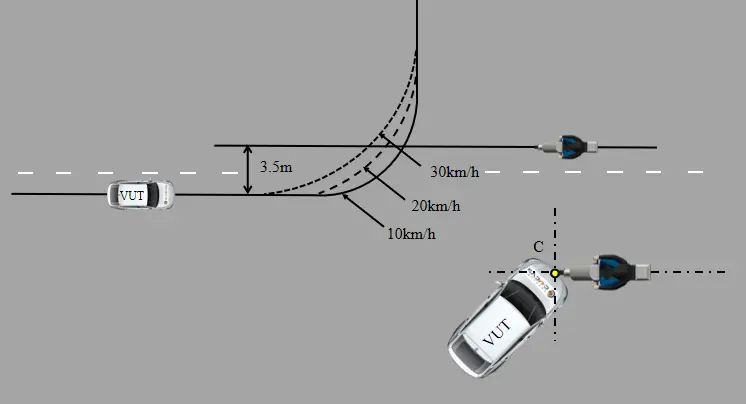
5 车辆左转与前方远端穿行的行人测试场景(CPTA-LF)
CPTA-LF 场景下,行人以 6.5km/h 的速度自相对车辆行驶方向的左侧向右侧移动。VUT 分别以 10km/h、20km/h、30km/h 的速度测试。碰撞位置在50%处。
该场景主要考察车辆系统在左转弯过程中,对远端横穿行人的识别及响应能力。
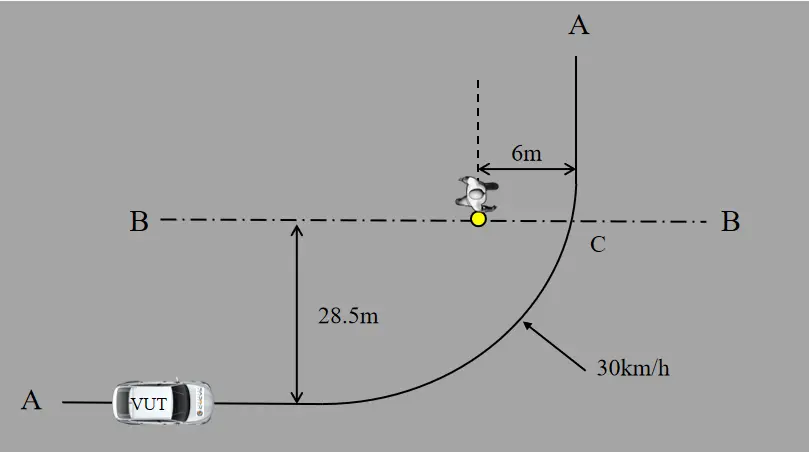
CPTA-LF 测试场景示意图
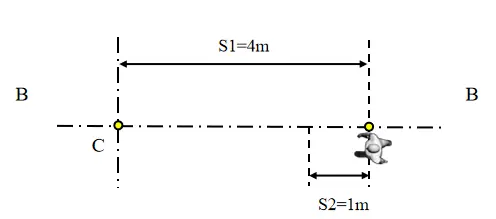
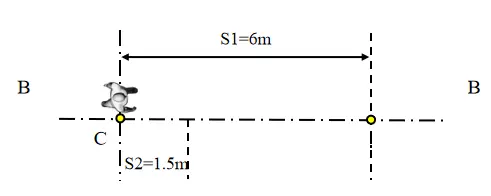
6 车辆右转与前方远端穿行的行人测试场景(CPTA-RF)
CPTA-RF 场景下,行人以 6.5km/h 的速度自相对车辆行驶方向的左侧向右侧移动。VUT 分别以 10km/h、20km/h 的速度测试。碰撞位置在 50%处。
该场景主要考察车辆系统在右转弯过程中,对远端穿行行人的识别及响应能力。
CPTA-RF 测试场景示意图
02 二轮车自动紧急制动系统(AEB VRU_TW)测试
AEB VRU_TW测试部分可获得最高分值为12分,和AEB VRU_Ped测试项目的类型设置较为类似,场景丰富,涵盖目标物横穿(障碍车遮挡),纵向追尾,测试车辆转弯,但不包含夜间场景。
值得一提的是,基于专项事故场景研究数据,二轮车事故在中国整体事故占比约54%,其中电动自行车占比很高。故弃用了旧版本的BTA普通自行车,引入新目标物EBTA电动自行车,以模拟更加贴近中国真实道路情况的试验,旨在有效降低二轮车事故发生率。

C-NCAP EBTA 外观图

C-NCAP STA 外观图
测试具体包括车辆直行与前方近端被遮挡的穿行的电动自行车测试场景(CBNAO)、 车辆直行与前方远端被遮挡的穿行的踏板摩托车测试场景(CSFAO)、车辆直行与前方纵向行驶的电动自行车测试场景(CBLA)、车辆左转与前方对向行驶的踏板摩托车测试场景(CSTA-LN)、车辆右转与近端穿行的踏板摩托车测试场景(CSTA-RN)。
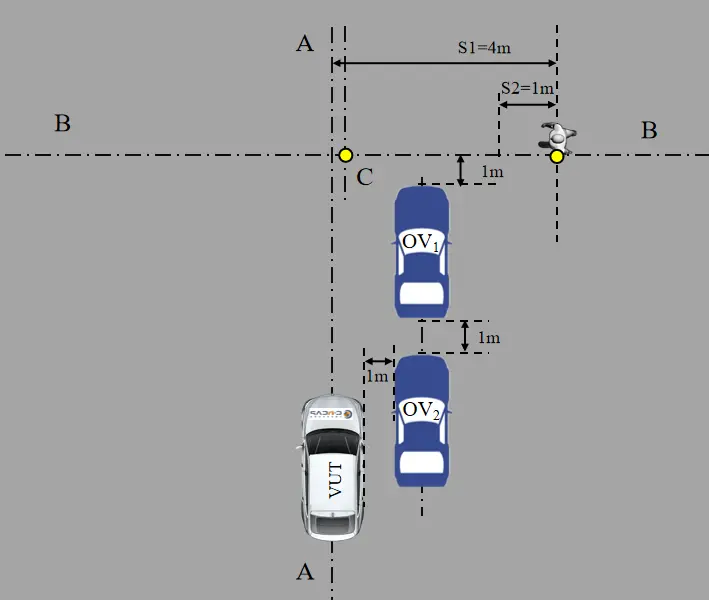
1 车辆直行与前方近端被遮挡的穿行的电动自行车测试场景(CBNAO)
CBNAO 场景下,电动自行车以 15km/h 的速度以与车辆行驶方向垂直的方向移动。VUT 分别以 20km/h、40km/h 和 60km/h 的速度测试。碰撞位置在 50%处。该场景主要考察车辆系统在直行中,对近端横穿的电动自行车的识别及响应能力。
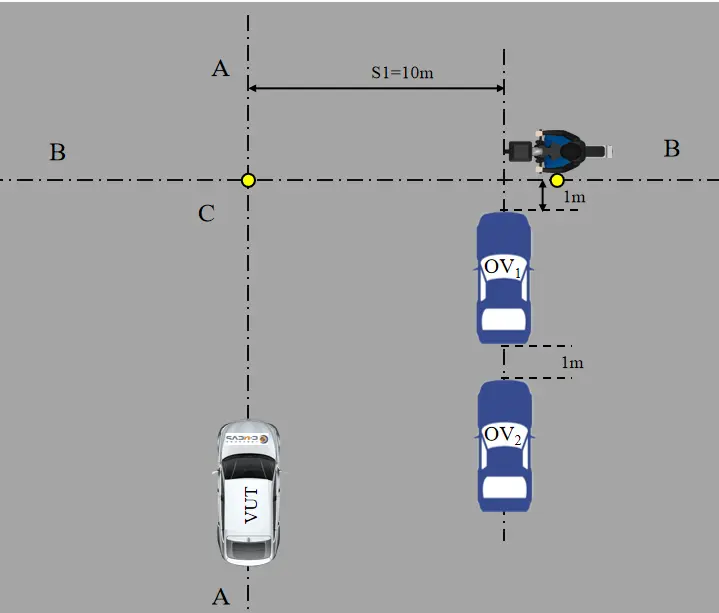
CBNAO-50 测试场景示意图
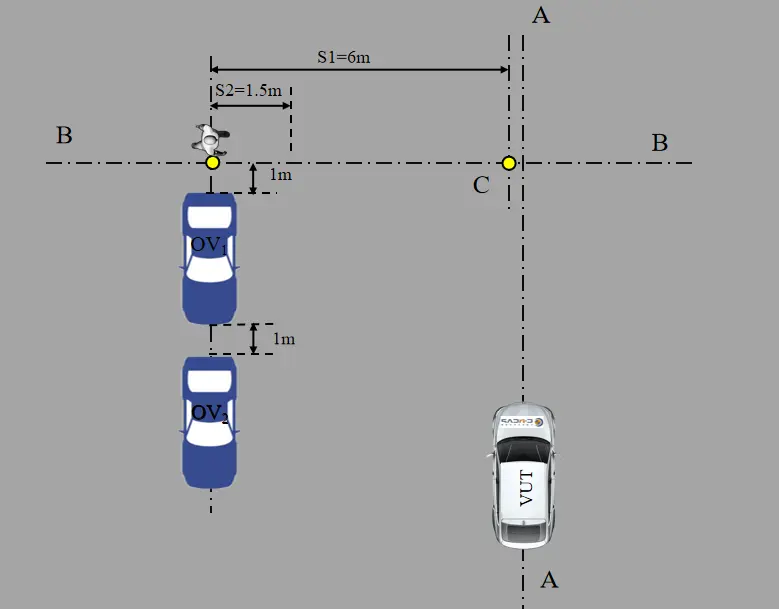
2 车辆直行与前方远端被遮挡的穿行的踏板摩托车测试场景(CSFAO)
CSFAO 场景下,踏板摩托车以 20km/h 的速度以与车辆行驶方向垂直的方向移动。VUT 分别以 20km/h、40km/h 和 60km/h 的速度测试。碰撞位置在 50%处。该场景主要考察车辆系统在直行中,对远端横穿的踏板摩托车的识别及响应能力。
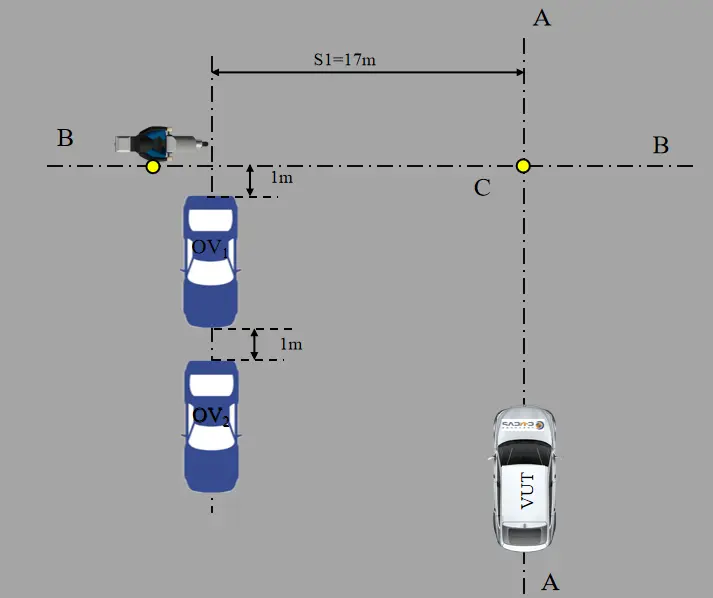
CSFAO-50 测试场景示意图
3 车辆直行与前方纵向行驶的电动自行车测试场景(CBLA)
CBLA 场景下电动自行车以 15km/h 的速度以与车辆行驶方向相同的方向移动。VUT 分 别以 20-80km/h 的速度测试,其中 20km/h、40km/h 测试 AEB 功能,60km/h、80km/h 测试 FCW 功能,碰撞位置在 25%处。该场景主要考察车辆系统在直行中,对前方纵向行驶的电动自行车的识别及响应能力。
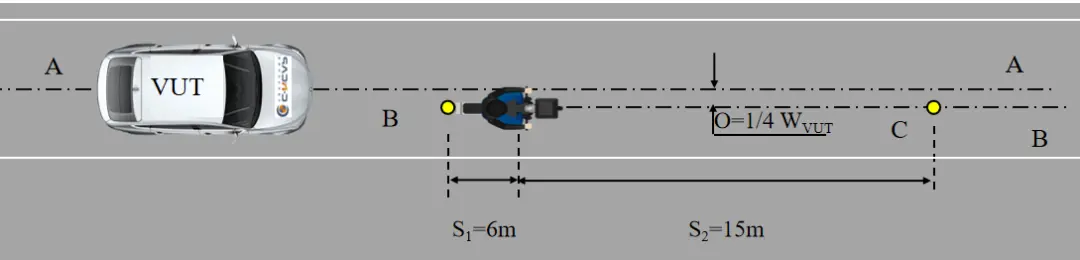
CBLA-25 测试场景示意图
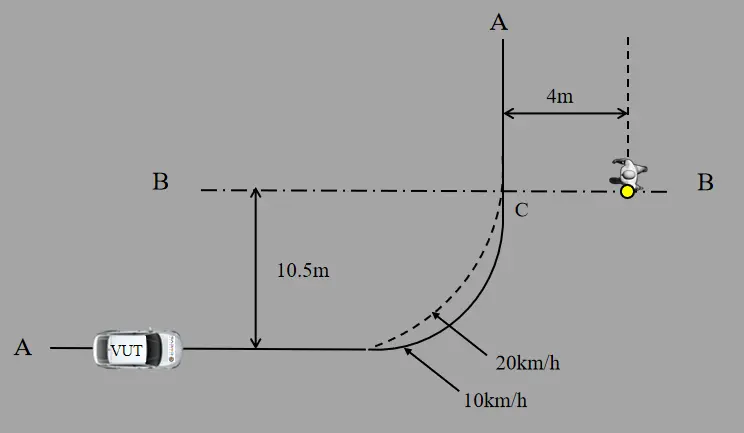
4 车辆左转与前方对向行驶的踏板摩托车测试场景(CSTA-LN)
CSTA-LN 场景下踏板摩托车以 20km/h 的速度以与车辆行驶方向相反的方向移动。VUT 分别以 10km/h、20km/h、30km/h 的速度测试。碰撞位置在 50%处。该场景主要考察车辆系统在左转弯过程中,对相邻车道对向驶来的踏板摩托车的识别及响应能力。
CSTA-LN-50 测试场景示意图
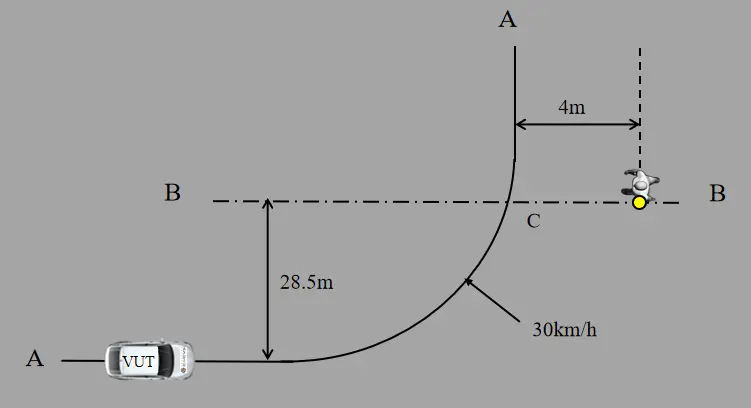
5 车辆右转与近端穿行的踏板摩托车测试场景(CSTA-RN)
CSTA-RN 场景下踏板摩托车以20km/h 的速度以与车辆行驶方向相同的方向移动。VUT 分别以10km/h、20km/h 的速度测试。碰撞位置在车辆右前处。该场景主要考察车辆系统在右转弯过程中,对相邻车道同向驶来的踏板摩托车的识别及响应能力。
CSTA-RN-50 测试场景示意图
行业发展表明,实施 NCAP 对于提高汽车安全性能和改善道路交通安全都有明显的效果。C-NCAP 实施十多年来,国内车型整体安全技术水平及评价成绩大幅提高,车辆主被动安全装置的配置率也显著增加,中国的广大消费者购买到更加安全的汽车产品,获得了更为安全的驾乘体验,对于改善中国道路交通安全状况有着明显的效果。C-NCAP 2024版实施后,将对车辆主动安全功能的研发、验证和测试等方面带来积极影响,尤其是AEB VRU试验规程的发布和实施,在引导汽车行业持续加强对车内驾乘人员保护的同时,中国道路交通环境下弱势道路交通参与者群体的安全性也会得到进一步关注和提升,C-NCAP测评将为中国道路交通安全水平持续提升发挥更有力的促进作用。
下一步,中汽研科技依托专业的主动安全测试场地、测试装备及人员团队资源,持续开展C-NCAP主动安全测评技术研究,支撑中心做好C-NCAP主动安全规程预研工作,为企业提供更加专业、高效、可靠的主动安全系统研发测试及行业测评服务,助力智能网联汽车产业高质量发展。







最新资讯
-
曼恩和ABB成功测试基于以太网通信的电动重
2025-04-21 21:18
-
一文讲述汽车电子电气EEA架构
2025-04-21 20:58
-
中汽中心受邀参加中国消费品质量安全提升系
2025-04-21 20:57
-
标准解读 | 新版动力电池安全强标解读
2025-04-21 20:56
-
标准解读丨深圳地标《智能网联汽车自动驾驶
2025-04-21 20:54
