




 广告
广告





















































自动驾驶上路前不可或缺的老司机模型

1.为什么需要老司机模型
2.老司机模型的关键要素
3.老司机模型的构建方法
4.老司机模型标准化现状及挑战
1.为什么需要老司机模型
自动驾驶系统ADS能上路的前提是:正常交通场景下,ADS能遵守道路交通规则;在意外情况下,例如其他交通参与者造成的可能导致事故的非预期情况(未打转向灯突然别车、对向车道忽然借本车道超车、前车货物跌落等),自动驾驶系统应该像成熟稳定的人类驾驶员(老司机)一样执行规避行动,以实现最小化任何人类(ADS车内、车外)伤害。
若想评判ADS的性能,首先要有一个统一的成熟稳定的人类驾驶员(老司机)模型作为自动驾驶系统的参考和依据,这有助于确保自动驾驶系统在验证过程中符合相关法规和安全标准的要求。
老司机模型为车辆仿真开发、高级驾驶员辅助系统ADAS设计以及自动驾驶系统ADS开发等领域提供有力的支持。老司机模型的应用可以提高ADS验证的真实性和准确性、提升ADS的安全性和可靠性、促进自动驾驶技术的迭代和优化、推动政策和法规的制定。

提高ADS验证的真实性和准确性
老司机模型能够高度模拟真实驾驶员的行为和决策过程,包括感知、判断、决策和反应等。这使得自动驾驶系统在验证过程中能够面对更加真实和复杂的驾驶场景,从而提高验证的真实性和准确性。
传统的自动驾驶验证方法可能受到测试驾驶员个人技能、经验和主观判断的影响。而老司机模型则基于大量的驾驶数据和统计分析,能够减少人为因素的干扰,使验证结果更加客观和可靠。
提升ADS的安全性和可靠性
老司机模型能够模拟驾驶员在潜在危险情况下(紧急场景)的反应和决策,从而帮助自动驾驶系统提前识别和评估风险,并采取相应的预防措施。这有助于提升自动驾驶系统的安全性和可靠性,减少交通事故的发生。
在复杂的交通环境中,自动驾驶系统需要能够快速而准确地做出决策。老司机模型通过模拟成熟稳定驾驶员在类似场景中的行为,为自动驾驶系统提供了丰富的参考案例和应对策略,使其能够更好地应对复杂场景的挑战。
促进自动驾驶技术的迭代和优化
通过对比ADS与老司机模型在相同场景下的表现,可以发现ADS在算法、感知、决策等方面的不足和缺陷。这有助于开发者对自动驾驶系统进行针对性的优化和改进,提升系统的整体性能。
老司机模型为自动驾驶技术的创新提供了重要的参考和借鉴。开发者可以通过分析老司机模型中的行为模式和决策逻辑,探索新的技术路径和解决方案,推动自动驾驶技术的不断发展和进步。
推动政策和法规的制定
在自动驾驶技术的商业化应用过程中,需要满足政府制定的相关法规和安全标准。因为缺少判断的标准和依据,高阶自动驾驶合规标准迟迟无法推出。老司机模型作为自动驾驶系统的重要参考和依据,有助于确保自动驾驶系统在验证过程中符合相关法规和安全标准的要求。
通过老司机模型的验证和应用,可以为政府部门制定自动驾驶技术的相关政策和标准提供重要的数据支持和参考依据。这有助于推动自动驾驶技术的规范化、标准化和商业化进程。
2.老司机模型的关键要素
老司机模型是一个理论框架或模拟系统,用于描述和模拟经验丰富的驾驶员在驾驶过程中的行为、决策和反应。这个模型要关注路网建模、车辆建模、驾驶员因素等,尤其是要考虑驾驶员的心理状态、驾驶习惯、对交通环境的感知、判断以及对潜在危险的预测和反应时间等多个方面。
道路网络建模:老司机模型的构建需要考虑道路网络的拓扑结构和交通流特性。通过构建道路网络模型,可以模拟车辆在不同道路条件下的行驶情况,从而更准确地预测驾驶行为。
车辆模型:车辆模型是老司机模型的重要组成部分。它描述了车辆的动力学特性和运动规律,对于预测车辆的行驶轨迹和速度变化具有重要意义。

驾驶员因素:除了车辆和道路因素外,驾驶员的心理和生理状态也会对驾驶行为产生重要影响。因此,在构建老司机模型时还需要考虑驾驶员因素,如驾驶员的反应时间、注意力分配和驾驶习惯(例如:行为决策、风险评估)等。
决策制定:老司机能够根据当前的交通状况、车辆状态、道路条件以及潜在的风险因素,迅速而准确地做出驾驶决策。这些决策可能涉及速度控制、车道变更、避让障碍物等。
风险评估:驾驶员在驾驶过程中需要不断评估周围环境的潜在风险,并据此调整驾驶行为。老司机模型能够模拟这种风险评估过程,包括识别潜在危险、评估其严重性和紧迫性,并采取相应的预防措施。
注意力分配:成熟的驾驶员能够灵活地分配注意力,同时关注多个信息源(如前方道路、后视镜、仪表盘等),并在必要时迅速转移注意力以应对突发情况。老司机模型需要能够模拟这种注意力分配机制。
场景适应性:成熟的驾驶员能够适应不同的驾驶环境和条件,包括不同的天气、道路类型、交通流等。针对不同的驾驶场景和条件,需要对老司机模型进行适应性调整和优化。例如,在复杂交通环境下,需要增加对交通信号、行人和其他车辆的感知和响应能力;在恶劣天气条件下,需要提高模型的稳定性和鲁棒性。
数据反馈:老司机模型在实际应用中会不断接收到新的数据反馈,这些数据可以用于对模型进行持续优化和迭代。通过不断地学习和更新模型参数,可以提高模型的准确性和可靠性。
3.老司机模型的构建方法
3.1 基于规则的构建方法
联合国L3级自动驾驶法规R157-ALKS要求:自动驾驶系统在其运行过程中不能够带 来“可避免”的风险(事故),并在附录中就给出了一个基于规则的老司机紧急制动模型。
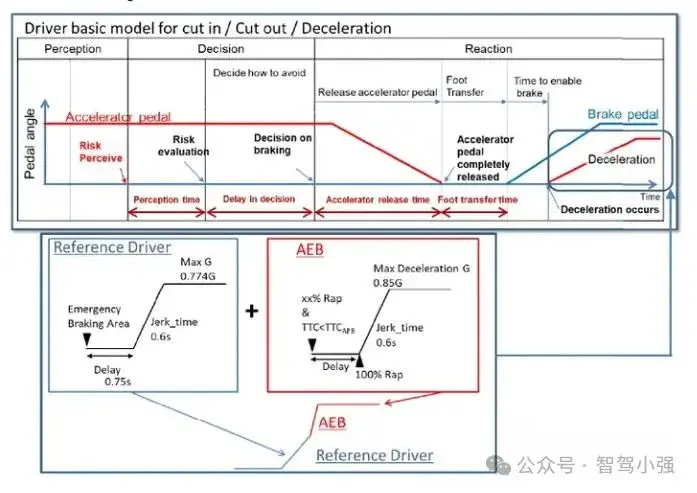
该模型以日本熟练且谨慎的老司机能力定义了相关参数:包括不同场景下的风险出现点(切入场景为切入车辆偏移车道中心线 0.375m,前车制动场景为前车减速度超过5m/s²),风险评估时间(0.4s),完成风险评估到开始制动的时间(0.75s),从制动开始到达到最大减速度的时间( 0.6s)及最大减速度值 (0.774g)。
| 因素 | ||
| 风险感知点 | 换道(切入、切出) | 换道车辆中心,偏离其行驶车道的中心,超过0.375m |
| 减速 | 前车的减速度,导致老司机觉得,当前跟车距离过近 | |
| 风险评估时间 | 0.4s | |
| 从感知结束到开始减速的时长 | 0.75s | |
| 至完全减速的时间(路面摩擦系数1.0) | 0.6s达到0.774g的减速度 | |
| 至完全减速的时间(自车和切入车辆完全重合后,道路摩擦系数1.0) | 0.6s达到0.85g的减速度 | |
然而,基于规则的老司机模型构建方法存在较大的局限性,因为驾驶场景的复杂性和变异性会导致规则系统的复杂度和矛盾性增加,进而会限制驾驶行为的泛化和适应性。
3.2 基于机器学习的构建方法
支持向量机SVM(Support Vector Machine)、神经网络(如深度神经网络、卷积神经网络等)、决策树等是构建驾驶模型时常用的机器学习算法。这些算法能够自动学习模型参数,并通过对输入数据的分析和处理来预测驾驶行为。
支持向量机SVM是一种基于结构风险最小化(Structural Risk Minimization, SRM)原则的二分类模型,它通过构建一个最大间隔超平面(maximum margin hyperplane)来分离不同类别的数据。在非线性可分情况下,通过引入核函数(Kernel Function)将低维输入空间映射到高维特征空间,使得原本不可线性分离的数据在高维空间变得线性可分,进而找到最优的超平面。
最大间隔:SVM的核心目标是在样本中找到一个超平面,使得两类样本距离该超平面的距离(称为间隔margin)最大化。这样,不仅将两类样本分开,而且使超平面尽可能远离训练样本,增强模型的泛化能力。
支持向量:间隔边界的样本(距离超平面最近的那些样本)被称为支持向量,它们对超平面的确定至关重要。一旦确定了支持向量,其他样本对超平面的位置就没有影响,这意味着SVM对训练数据中的噪声和异常值具有较好的鲁棒性。
与基于规则的老司机模型构建方法相比,基于机器学习的方法具有更强的泛化能力和适应性,能够更好地应对复杂的驾驶场景和变化。但也存在数据依赖性强、模型可解释性差、计算资源要求高、过拟合等缺点。
机器学习模型高度依赖于训练数据的质量和数量。如果训练数据存在偏见或不平衡,模型的学习结果也会受到相应影响,可能导致模型在实际应用中出现不公平的决策或预测。机器学习模型通常包含多个层次和大量节点,这使得模型的决策过程变得难以理解和解释。此外机器学习模型的训练和推理过程需要消耗大量的计算资源和时间,这会显著增加模型的开发和部署成本。
此外,机器学习模型容易对训练数据产生过拟合现象,即模型在训练数据上表现良好,但在新的、未见过的数据上表现不佳。这会导致模型的泛化能力下降,无法适应实际应用的多样性。
3.3 混合方法
为了充分利用规则方法和机器学习方法的优势,一些研究者提出了混合方法。这种方法将基于规则的驾驶行为与基于机器学习的驾驶行为相结合,通过规则来约束和指导机器学习模型的决策过程。
混合方法能够在保持模型稳定性的同时,提高模型的泛化能力和适应性,从而更好地应对复杂的驾驶场景。
成熟驾驶模型的构建方法是一个综合了规则方法、机器学习方法和混合方法的复杂过程。通过不断优化和迭代模型参数和结构,可以提高模型的准确性和适应性,从而为实现自动驾驶提供有力支持。
4.老司机模型标准化现状及挑战
目前,我国自动驾驶应用主要以L1和L2为主,并逐渐向L3、L4级迈进。自动驾驶技术在乘用车市场的渗透率快速增长,例如,2023年乘用车L2级自动驾驶渗透率达到47.3%,2024年1至5月已突破50%。城市NOA技术成为热点,多家车企积极投入,推动该技术的普及和应用。
然而,当前在老司机模型标准化方面我们是相对落后的。当前,成熟驾驶模型标准化工作主要由国际标准化组织(ISO)和一些国家标准化机构来制定实施。ISO及欧盟制定了一系列与自动驾驶技术相关的成熟驾驶模型标准和法规,涵盖了驾驶模型类别、能力要求、适用场景等方面的规范。
R157-ALKS法规中提出了紧急制动模型(跟驰模型的一种),用以确定在遇到紧急场景时可以避免碰撞的能力边界,并以此作为自动驾驶车辆的能力要求。
ISO 17387《 智能交通系统 车道变更决策辅助系统 (LCDAS)性能要求和测试步骤》标准中对换道模型提了一些具体要求,包括性能要求和试验方法、车辆的探测响应能力、不可进行换道的条件、换道时间等方面的内容。
R171-DCAS提出了覆盖城市工况和高速工况的跟驰模型和安全换道模型。
GB/T41798-2022《智能运输系统 自适应巡航控制系统性能要求与检测方法》中提出了跟驰模型,GB/T37471-2019 《智能运输系统 换道决策辅助系统性能要求与检测方法》中提出了换道模型。
自动驾驶汽车的安全性是重中之重,自动驾驶汽车在其设计运行域ODD内, 不得造成任何合理可预见且可避免的交通伤亡事故。其中“合理可预见且可避免”指的是注意力集中的成熟驾驶员(老司机)可以避免的碰撞。如果ADS汽车能够在其ODD内的合理可预见的场景下,达到老司机的避免碰撞的水平,则可判定其满足联合国所定义的安全原则。
老司机(成熟驾驶)模型在标准化方面已取得一定进展,但仍面临技术成熟度、法规伦理、市场接受度、数据安全与隐私保护以及技术协同与跨界合作等多方面的挑战。未来需要持续加大研发投入、完善法规政策、提升公众信任度并加强跨界合作以推动自动驾驶技术的进一步发展。
因此我们需要尽快根据中国老司机(注意力集中的成熟驾驶员)建立紧急反应模型及数据库,以定义自动驾驶汽车的行为安全能力边界,支撑ADS准入标准的制定。



编辑推荐



最新资讯
-
全球首次!IVISTA 2023版修订版引入带灯光
2025-04-28 09:59
-
我国首批5G毫米波行业标准送审稿审查通过
2025-04-28 08:56
-
5/16 厦门- 新能源汽车电驱测试技术的创新
2025-04-28 08:53
-
国内首个汽车电磁防护技术验证体系EMTA正式
2025-04-28 08:49
-
一文带你了解滤波器
2025-04-28 08:35
