




 广告
广告





















































用于路径跟踪的几种不同形式的车辆运动学模型

在自动驾驶车辆路径跟踪控制系统设计中,经常使用车辆的运动学模型,这种模型完全基于车辆运动特性的几何关系建立,不考虑影响运动的力特性,使用时模型简单,便于分析。本文将介绍几种常用的车辆运动学模型。
1、以前轴中心为车辆中心的运动学模型
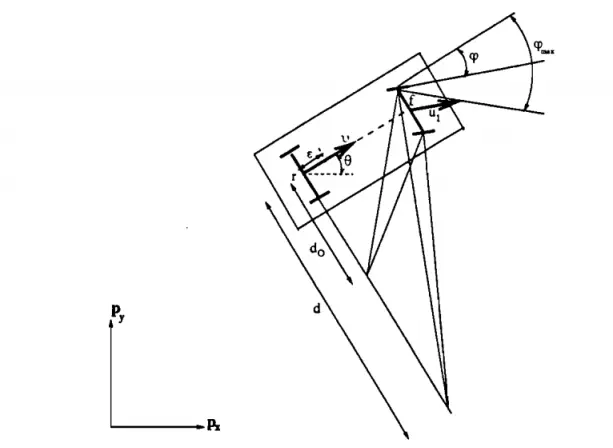
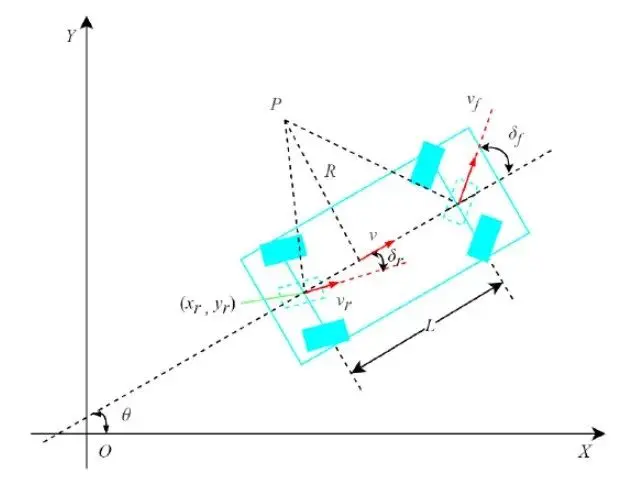
图1 车辆模型
其中, 为前轮转向角,
为前轮转向角, 为横摆角,
为横摆角, 为车辆前轴速度,
为车辆前轴速度, 为前轮转角速度,f为前轴中心,r为后轴中心,v为后轴的速度,e为轴上任意一点到后轴中心的距离。
为前轮转角速度,f为前轴中心,r为后轴中心,v为后轴的速度,e为轴上任意一点到后轴中心的距离。
由勾股定理可知:

其中,R为转弯半径,L为轴距。
刚体的角速度等于它的线速度除以线速度到速度瞬心的距离R,即:

把(4)带入(5)中可得:

以前轴中心为车辆中心的运动学模型如下所示:

2、以后轴中心为车辆中心的运动学模型
把前轴中心的坐标转化为后轴中心的坐标:
式(8)对t求导可得:

将式(1)、式(2)和式(6)带入上式可得:

以后轴中心为车辆中心(速度是前轴中心的速度)的运动学公式:
由速度投影公式可知:

将上式带入式(11)中可得以后轴中心为车辆中心的运动学公式:

3、以轴上任意一点为车辆中心的运动学模型
把后轴中心的坐标 转化为轴上任意一点的坐标
转化为轴上任意一点的坐标 :
:
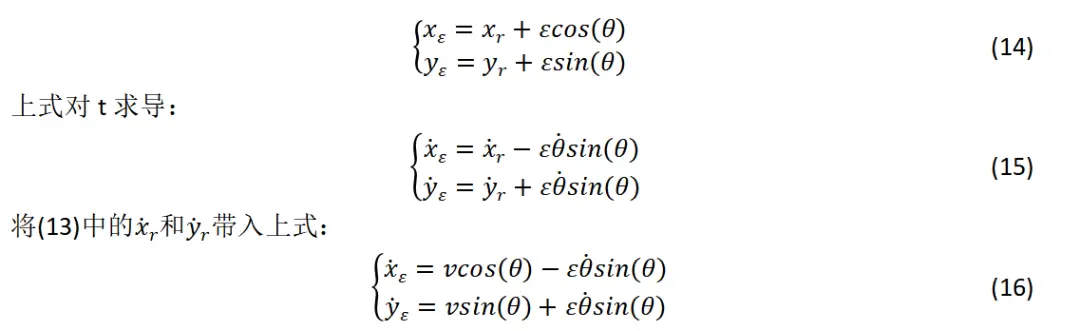
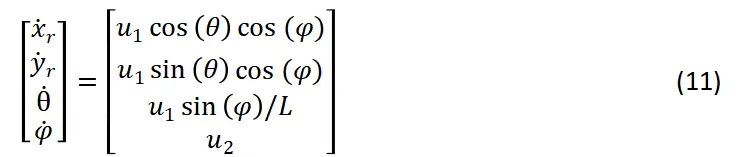
以轴上任意一点为车辆中心的运动学公式:

上式中的 为横摆角速度。
为横摆角速度。
4、考虑质心侧偏角、以质心为中心的运动学模型
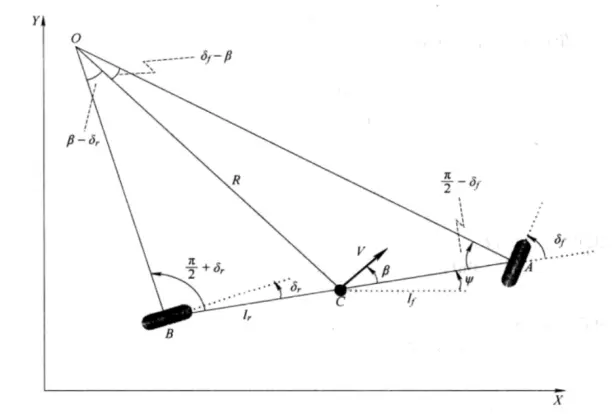
图2 自行车模型
其中, 分别为前后轮转角,
分别为前后轮转角, 为质心侧偏角,
为质心侧偏角, 分别为质心到前后轴的距离,R为转弯半径,C为质心,O为速度瞬心,A和B分别为前后轴中心。
分别为质心到前后轴的距离,R为转弯半径,C为质心,O为速度瞬心,A和B分别为前后轴中心。
由勾股定理可知:

一个刚体的角速度等于它的线速度除以线速度到速度瞬心的距离,即:

由正弦定理可知:
把公式(4)带入(3)中得:

考虑质心侧偏角、以质心为中点的运动学公式:

若后轮不转向:

车辆低速时,可假设 上式则将简化为如下形式,这也是常用的一种运动学模型
上式则将简化为如下形式,这也是常用的一种运动学模型

5、以后轴中点为车辆中心的第二种运动学模型
其中, 分别为前后轮转角且都为正值,正负号通过左正右负判断,
分别为前后轮转角且都为正值,正负号通过左正右负判断, 为横摆角,
为横摆角, 为后轴中心的速度,R为质心速度v对应的转弯半径,P点为速度v的瞬心,L为轴长。
为后轴中心的速度,R为质心速度v对应的转弯半径,P点为速度v的瞬心,L为轴长。
对 进行分解可得:
进行分解可得:

由速度投影定理可知:

与式(20)相同得到R:

通过式(26)和式(27)可得横摆角速度:

根据上述推导,最终得到车辆后轴中点位置的运动学方程如下:

6、Frenet坐标系下的运动学模型
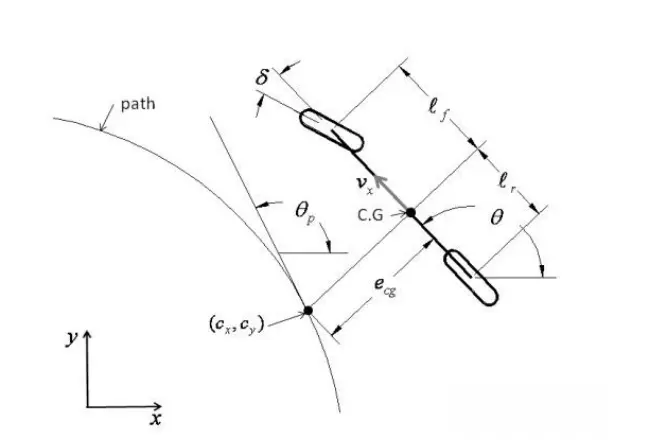
图4 道路坐标系下的车辆运动学模型
其中, 分别为横摆角和参考横摆角,
分别为横摆角和参考横摆角, 为横向误差,
为横向误差, 为前轮转角,
为前轮转角, 分别为质心C.G到前后轴的距离,为质心的速度。
分别为质心C.G到前后轴的距离,为质心的速度。

联立上式可得车辆在frenet坐标系下的运动学方程如下,这也是在自动驾驶中经常使用的一种运动学模型,尤其是在车道保持和GPS循迹行驶中。

综上,本文介绍了6种不同的车辆运动学模型,其中使用最多的是模型(24)和(32),这两个模型分别应用于不同的坐标系。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
