




 广告
广告





















































燃料电池重卡整车能量管理技术解析

01 背 景
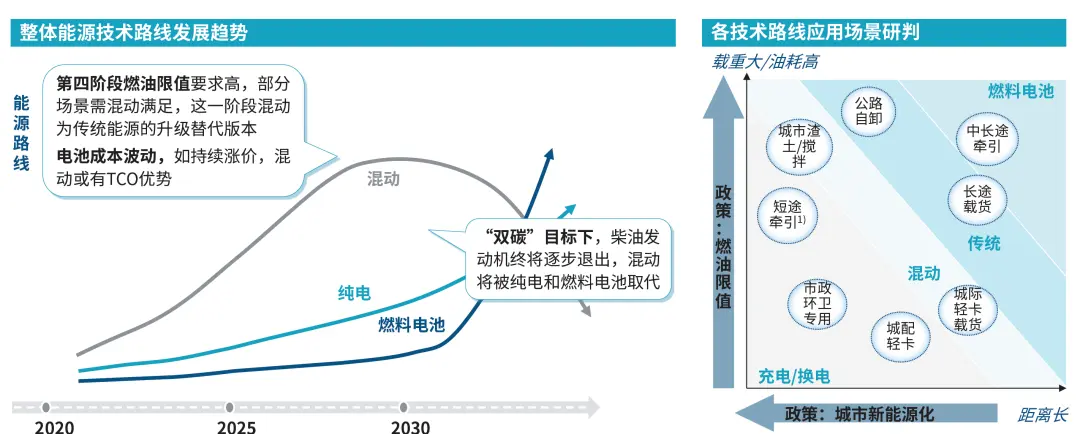
2020年9月22日,第七十五届联合国大会上我国政府提出:“中国将提高国家自主贡献力度,采取更加有力的政策和措施,二氧化碳排放力争于2030年达到峰值,努力争取2060年前实现碳中和”,碳中和的实现必须推动上游高耗能行业及下游应用同步转型,而氢能则是实现碳中和的重要途径,在下游交通环节的应用中,柴油货车虽然保有量只占汽车总量的7.95,但其一氧化碳、碳氧化合物、氮氧化合物及颗粒物的排放,却占到了汽车排放总量的10%、18.8%、60%与84.6%以上,为实现碳中和,交通领域的电动化为大势所趋,而商用车特别是柴油货车电动化则是迈向碳中和的重要加速器,
而在新能源商用车的使用场景中,对于400km以内的城配物流及运距短、启停工况多、且实行新能源路权政策等场景,纯电将成为主要路线,纯电在城配轻卡、市政环卫、短途牵引将率先渗透,而对于诸如长途牵引等400km以上且载重较大的城际长距离运输场景,由于其对电池容量及耗电需求较高,纯电车型实现困难,长期将有氢燃料电池车型主导。
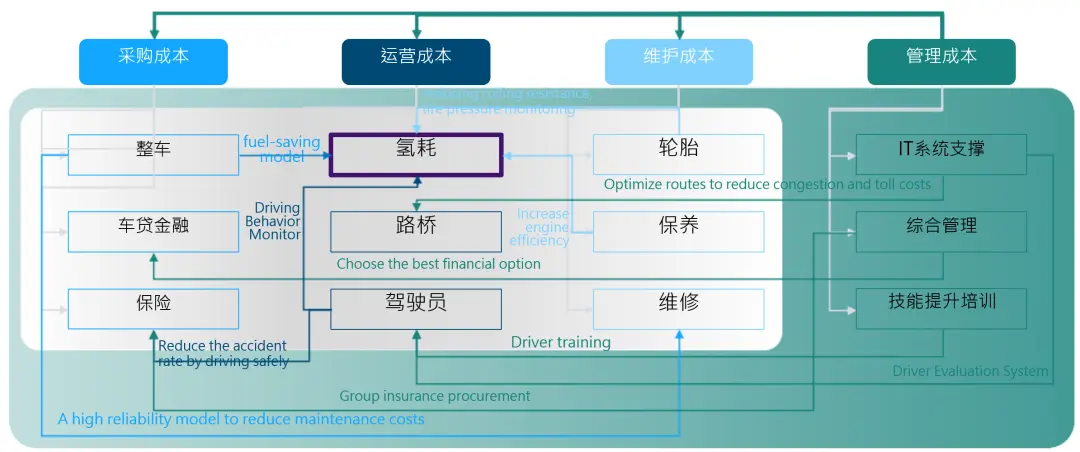
另外商用车用户其在购买车辆时,不只关注车辆的购置成本,而是关注车辆的总拥有成本TCO(Total Cost Of Ownership),包括采购成本、运营成本、维护成本及管理成本,其中运营成本占TCO的比例最大,而运营成本中燃料成本则占比例最大,因此对于氢燃料重卡在国家推动氢气成本降低的同时降低单车的氢气消耗将对其TCO的缩减带来巨大的效益。
02 氢燃料电池重卡的基本构型及动力源工作特性
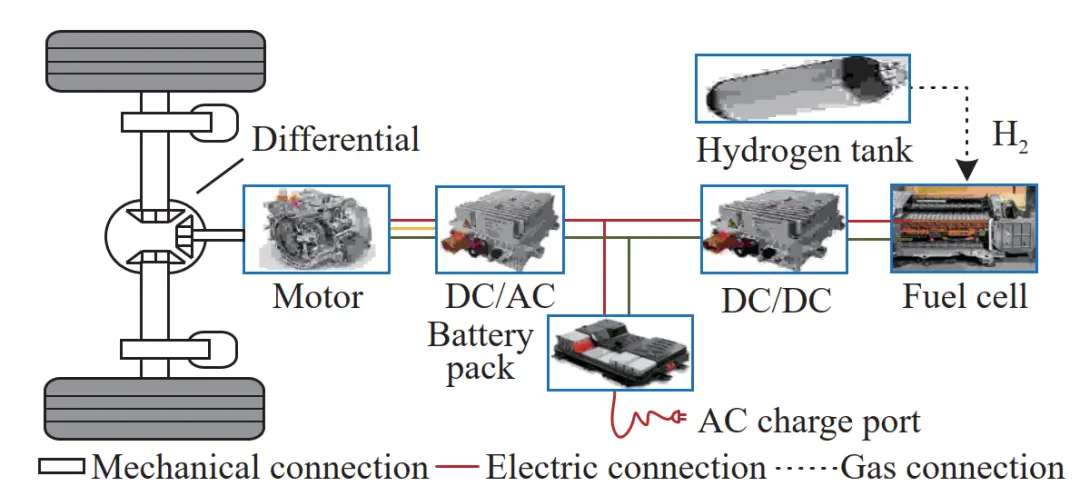
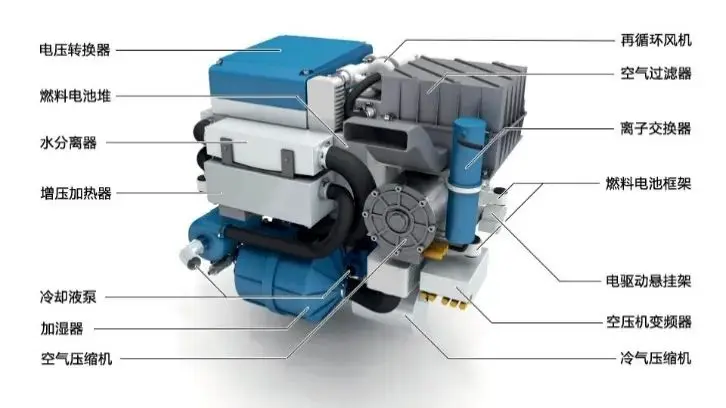
燃料电池汽车普遍使用的构型如上,其包含如下主要部分:
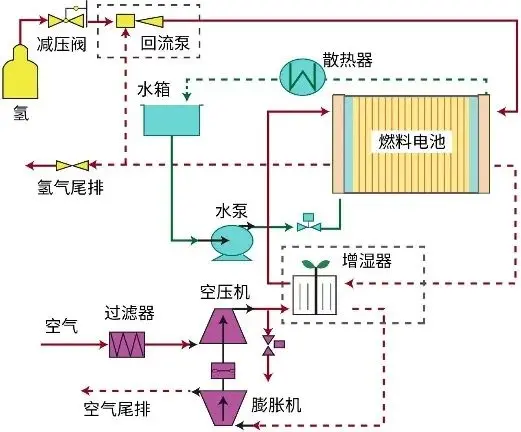
1. 燃料电池系统:以质子交换膜燃料电池PEMFC(Proton Exchange Membrane Fuel Cell)为例,其包含燃料电池电堆(多个单体电池的组合体)、进气系统(空滤、流量计、空压机、中冷器等)、氢气系统(氢气循环泵/引射器、氢气喷射器等)、热管理系统(水泵、风扇、水箱等);
2. 燃料电池DCDC:燃料电池电堆的输出电压(取决于单体电压个数及单体电压)通常不能满足整车高压部件的工作电压需求,需要有DCDC进行升压后输出;
3. 储氢系统:燃料电池汽车的主要能源来自车载储氢瓶中存储的氢气(H2),通常根据车辆的续驶里程需求及单个氢瓶储氢容量(35Mpa/70Mpa)会装备不同数量的氢瓶;
4. 高压动力电池:由于车辆在行驶过程中工况复杂,会有频繁的加速、爬坡、制动等情况,而燃料电池因其自身的特性无法实时满足整车的功率需求,需要有高压动力电池进行“削峰填谷”;
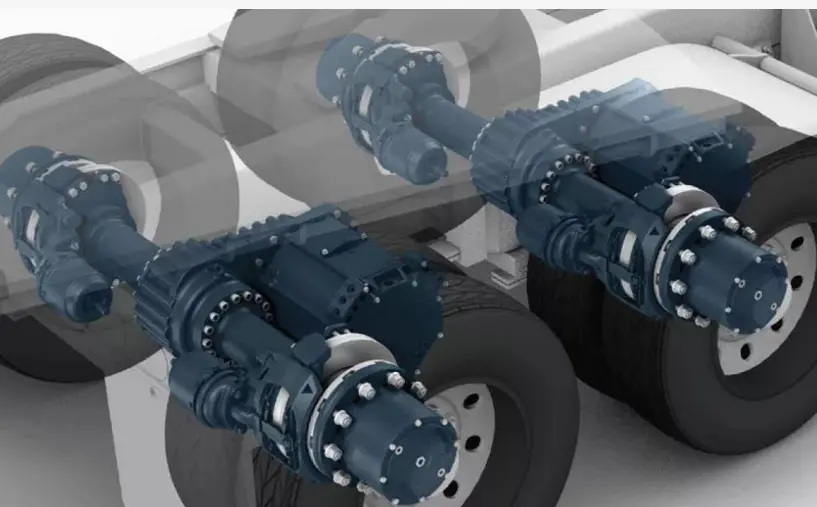
5. 驱动系统:对于重卡车型,可以是双集成桥或分布式(4电机)等不同的驱动形式,需要有电机控制器、驱动电机、变速箱、差速器等将电能转换为机械能,驱动车辆行驶;
6. 控制系统:包含燃料电池控制系统、氢系统控制器、高压动力电池控制系统、电机控制系统以及整车控制器等;
在上述构成中,燃料电池系统和高压电池系统作为整车的动力源,其具有不同的工作特性:
2.1 燃料电池系统特性分析
1. 燃料电池的耐久性
燃料电池的使用寿命问题一直是制约燃料电池汽车大规模应用的关键难题,对于燃料电池商用车而言,其车载燃料电池至少应该有2万小时以上的正常寿命,然而在车载工况下通常无法满足这一要求,导致燃料电池寿命衰减的主要劣化工况有:
频繁启停工况:燃料电池系统在频繁启停工况下会加剧其寿命衰减,因此能量管理的策略需合理控制减少燃料电池启停工况出现的频率,以延长其使用寿命;
连续低载或怠速工况:当燃料电池处于连续低载或怠速工况下,电堆单电池会维持在一个接近于开路电压的高电位状态,此时阴极电位通常在0.85V-0.9V,这种高电位状态会引起质子交换膜的化学腐蚀,从而引起电堆不可逆的寿命衰退,因此能量管理策略需在低负荷的情况下尽量维持燃料电池工作在高效区内,通过给高压动力电池充电来减少低载或怠速工况的出现,以延长燃料电池的使用寿命;
大幅变载工况:由于重卡的载重量大,路况复杂,载荷波动范围大,当燃料电池处于剧烈变载工况下,会出现反应气体供应不足进而引起寿命衰减,此外,连续变载会进一步加剧电堆内部催化剂和碳载体的损伤,因此能量管理策略需减少燃料电池系统大幅变载的工况,减缓燃料电池寿命的衰减;
过载工况:燃料电池具有一定的过载能力,但是长期的满负荷运行会导致燃料电池寿命衰减,因此能量管理策略需避免燃料电池长时间高负荷运行或过载运行。
2. 燃料电池效率分析
由如下燃料电池的功率-效率曲线可知,当燃料电池的输出功率较小小于c点时,其效率较低,当输出功率继续降低时,其效率会急剧降低,而当其输出功率大于d点时,系统效率也会出现加速下降趋势,因此能量管理策略应将燃料电池的工作区间限制在高效率区(c-d),并尽量维持在最佳效率区(a-b)。
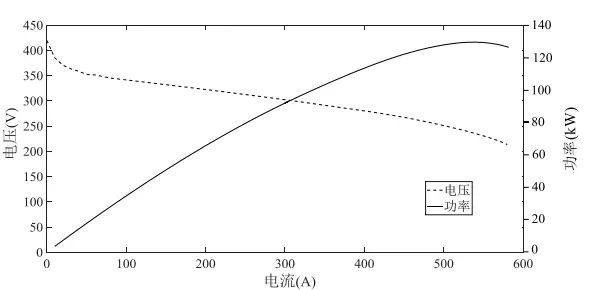
燃料电池工作特性曲线
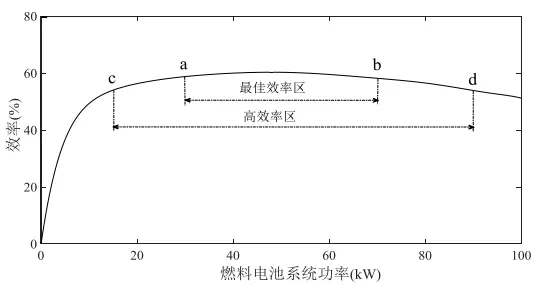
燃料电池功率-效率曲线
03 燃料电池重卡的能耗优化方向
3.1 燃料电池与高压电池功率分配优化
基于上面对氢燃料重卡的基本构型及两种动力源(燃料电池+高压电池)工作特性的说明,在氢燃料重卡不同运行工况下如何合理的分配燃料电池的输出功率和高压电池的输出功率,从而在满足整车动力性需求提高燃料电池的寿命并使氢耗最小,针对该问题目前行业内有不同的控制策略,主要分为如下几类:
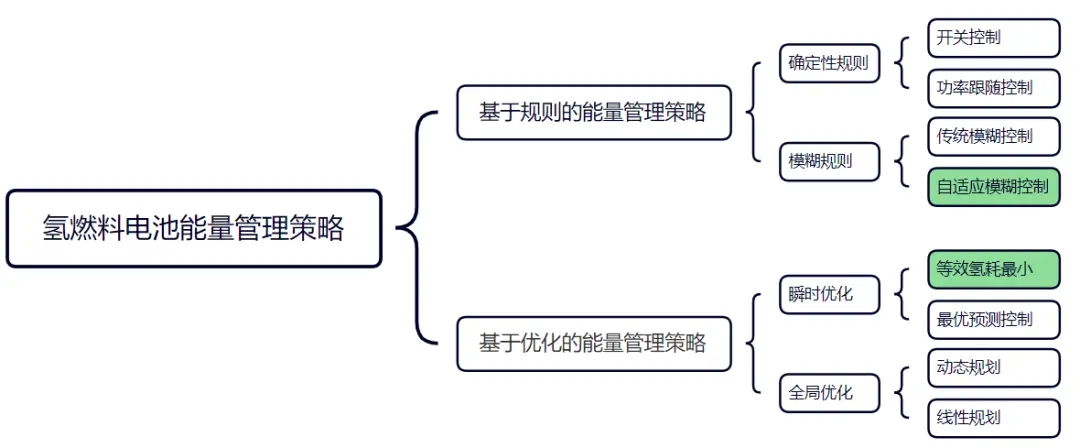
开关控制:简单易于实现,其核心在于始终控制燃料电池工作在高效区间,当动力电池SOC达到设定的最大值后关闭燃料电池,由动力电池单独工作,当动力电池SOC低于设定值是开启燃料电池,控制其在满足整车功率需求的同时为动力电池充电,直到动力电池SOC达到最大值然后再次关闭燃料电池,由动力电池单独工作,以此不断往复,此种控制策略,动力电池会不断进行深层次的充放电,燃料电池会频繁的启停,该策略会对动力电池和燃料电池的寿命产生影响;
功率跟随控制:核心在于控制动力电池的SOC向目标期望值靠近,而燃料电池则在允许的范围内根据动力电池的SOC和整车需求功率实时调整输出功率;
模糊控制:不需要精确的数学模型,对于动态特性复杂的燃料电池具有较好的适应性,但是该策略更多的依赖工程经验积累,如基于WAFA符合模糊控制策略;
瞬时优化-等效氢耗最小控制:建立整车的瞬时等效氢耗模型,并建立对应的实时目标函数,始终以瞬时氢耗最小为控制目标,从而进行燃料电池和动力电池的功率分配,如等效消耗最小ECMS(Equivalent Consumption Minimization Strategy);
全局最优控制:一般是针对固定的典型运行工况下,实现全局的能耗最小等控制目标,核心在于建立精准的数学模型或预测模型,通过复杂的计算实现特定条件下的最优控制,其控制效果受到模型准确性的影响较大,实现难度较大,如预测性自适应巡航PACC(Predictive Adaptive Cruise Control);
3.1.1 功率跟随控制
功率跟随控制以燃料电池的输出功率为主,动力电池进行峰值功率补充,根据高压动力电池的当前SOC其主要分为三种模式:
1. SOC<SOCmin
此时动力电池的SCO较低,应尽可能避免或减少动力电池功率输出,重卡的整车需求功率全部由燃料电池提供,并为动力电池进行充电,直到动力电池的SOC>SOCmin,此阶段燃料电池按照最大功率输出Pfc=Pfc-max;
2. SOCmin <SOC<SOCmax
此时动力电池处于理想的工作区间,可以对动力电池进行适当的充电或放电,此时的控制方法为尽量让燃料电池工作在其高效区,并尽可能的满足整车重卡功率需求,动力电池进行峰值功率的补充或多余能量的回收,此时燃料电池的输出功率变化范围为:
Pfc-min≤Pfc≤Pfc-max
3. SOC>SOCmax
此时动力电池不宜继续进行充电,否则会影响能量回收的效果,此时的控制方法为:维持燃料电池在高效区的前提下尽可能控制以较小的功率输出,以加快动力电池的电量消耗,使动力电池SOC尽快回归到合理的区间范围内。
3.1.2 基于WAFA复合模糊控制能量管理策略
上述功率跟随控制能量管理策略,虽然具有简单可靠的优势,但其无法适应重卡车型的动态工况,而模糊控制是逻辑门限控制的非线性扩展,属于高鲁棒性的非线性控制,对于动态工况复杂的燃料电池重卡具有很好的适应性。
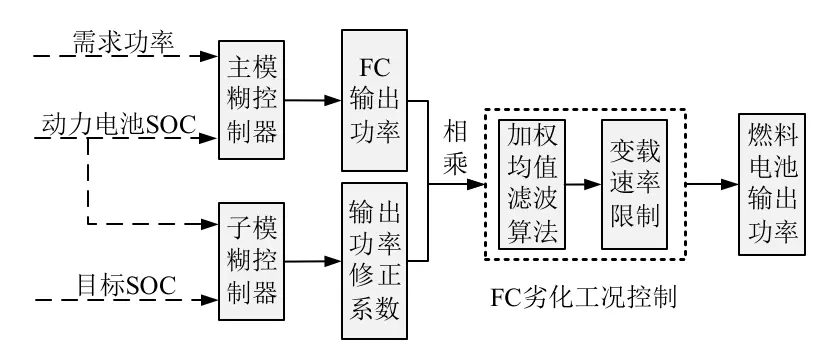
WAFA复合模糊控制逻辑结构
WAFA复合模糊控制策略以单一模糊控制系统为基础,满足重卡动力系统的功率需求,并通过增加子模糊控制系统对燃料电池和动力电池的输出功率进行动态修正,实现对动力电池SOC的实时动态调整,在此基础上采用加权均值滤波算法WAFA对经复合模糊控制输出的燃料电池功率进行平滑处理以降低高频功率的输出,并通过变载速率限制法对燃料电池的变载速率进行限制,以避免大幅度劣化工况的出现,该策略在兼顾燃料电池经济性、耐久性和动力电池稳态调节能力的前提下,实现对两种动力源之间功率的合理分配。
1. 主模糊控制器设计
主模糊控制器的作用是根据动力系统的功率需求和动力电池的SOC确定燃料电池输出功率,使动力系统满足重卡动力性和经济性的需求,首先需要确定输入变量动力系统功率需求Prep、动力电池SOC和输出变量燃料电池输出功率Pfc三个变量的隶属度函数,即设定基本论域。
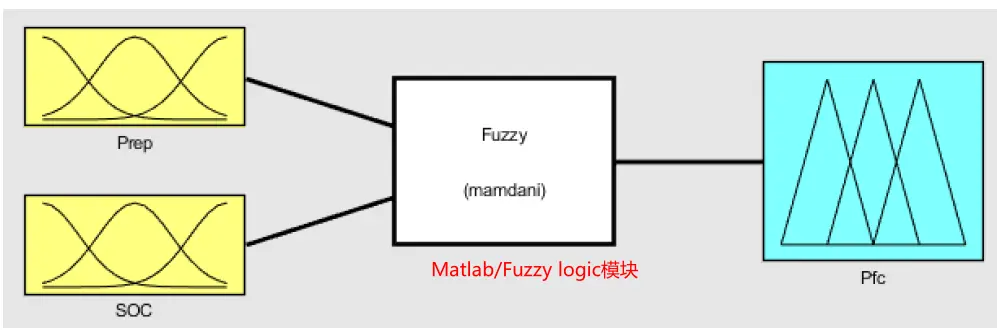
主模糊控制器系统界面
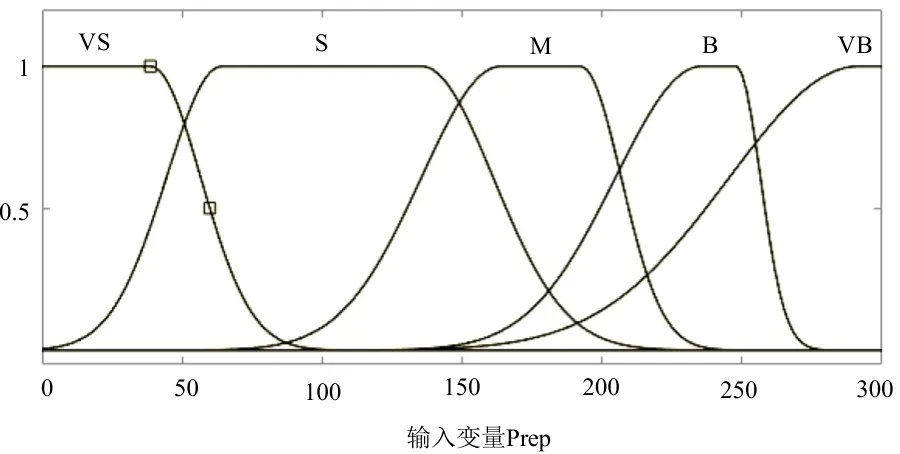
动力系统需求功率Prep隶属度函数的论域定为【0,300】,将隶属度函数划分为{VS,S,M,B,VB}五个模糊子集,其中VS,S,M,B,VB分别代表很小,小,中,大,很大。
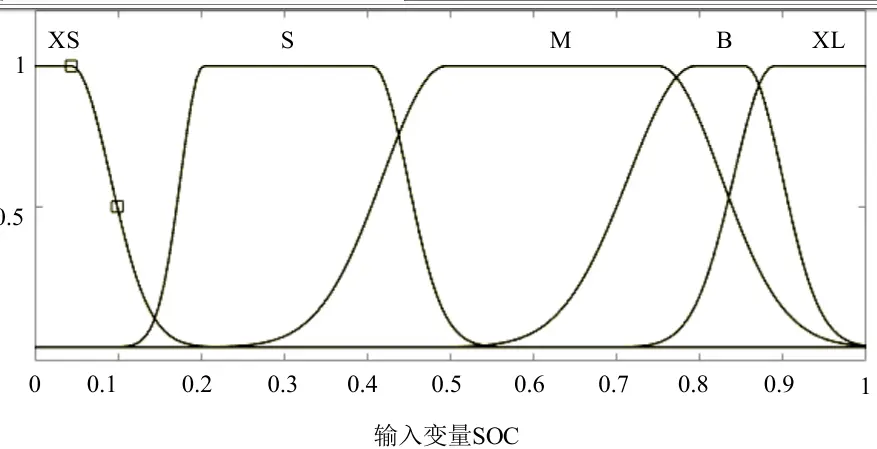
动力电池SOC的论域定为【0,1】,SOC的隶属度函数划分为{XS,S,M,B,XL}五个模糊子集,XS,S,M,B,XL分别代表很小,小,中,大,很大。
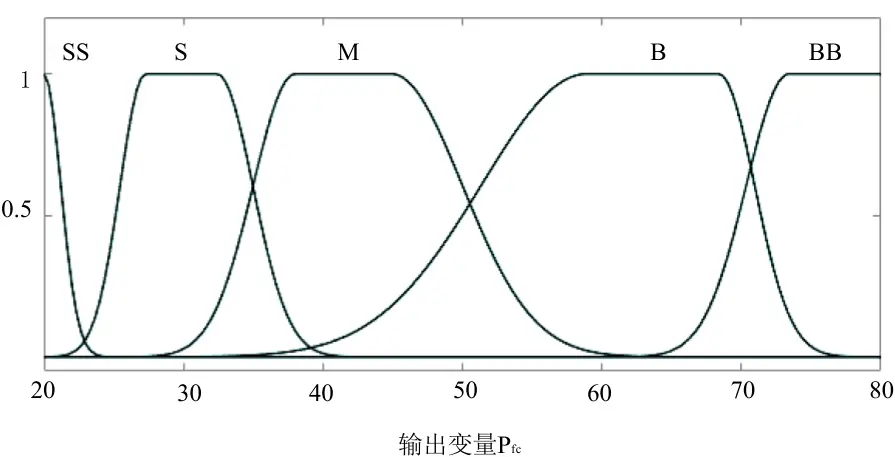
将燃料电池输出功率 Pfc 隶属度函数的论域定为[20,75]。划分 Pfc 为五个模糊子集:{SS,S,M,B,BB},其中SS、S、M、B、BB 的含义分别是很小、小、中、大、很大。
制定模糊控制规则的设计目标如下:
降低燃料电池的启停次数;
保证燃料电池运行在高效率区间,使氢耗尽可能小,并尽量运行在最佳效率区间;
动力电池过放会降低动力电池的循环寿命,能量管理策略应将动力电池SOC限制在合理的工作范围内,并可能得避免动力电池以大倍率方式参与充放电;
当重卡处于起步、加速、爬坡等大功率需求时,动力电池应及时为整车提供瞬时峰值功率;
在重卡减速制动状态下,利用动力电池进行制动能量回收;
根据以上目标制定IF-THEN规则表如下:
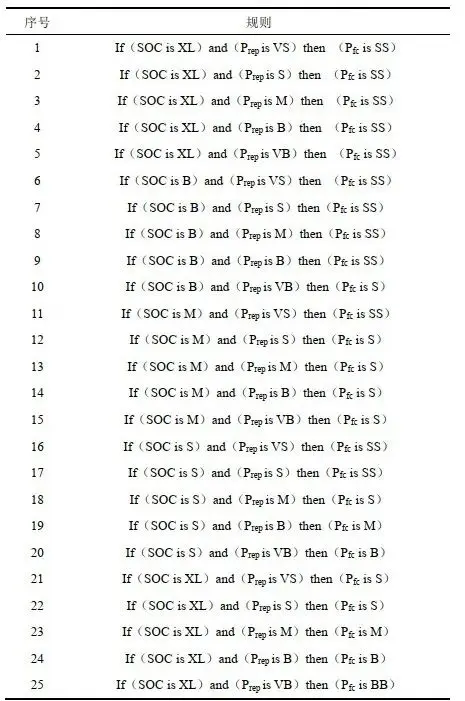
主模糊控制器IF-THEN规则表
由上述控制规则得到模糊控制器的功率分布图如下
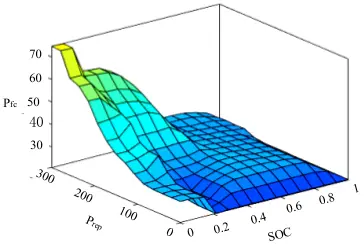
主模糊控制器的功率分布
2. 子模糊控制器设计
子模糊控制器的作用是针对重卡动力电池SOC波动大,调节迟滞的缺点,根据动力电池SOC与目标SOC的差值大小对主模糊控制器输出的燃料电池功率进行动态修正,使动力系统调节更加灵活,以适应重卡的工况。
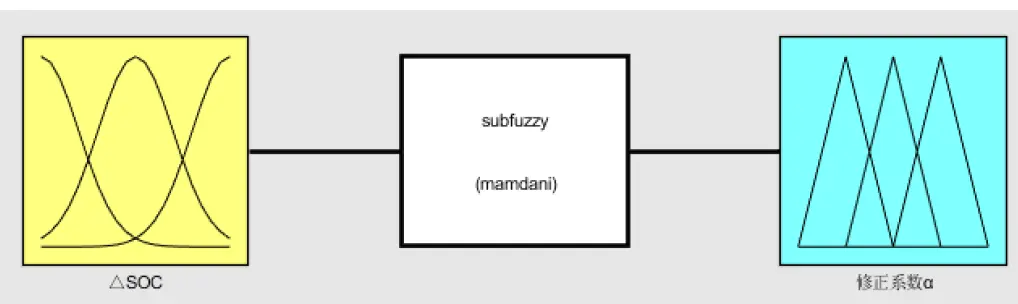
子模糊控制器系统界面
子模糊控制器以动力电池当前 SOC 与其期望值 SOC* 的差值 ΔSOC 为输入,以燃料电池的输出功率修正系数 α 为输出。根据计算和控制需求,设置ΔSOC 的论域为[-0.5,0.5],将其隶属度函数划分为{Small,Middle,Big} 三个模糊子集,表示低、中、高;将α 的论域设置为[0,2],将其隶属度函数划分为 {S,M,L} 三个模糊子集,表示小、中、大。并制定子模糊控制器的控制规则,得到燃料电池输出功率的修正系数分布图
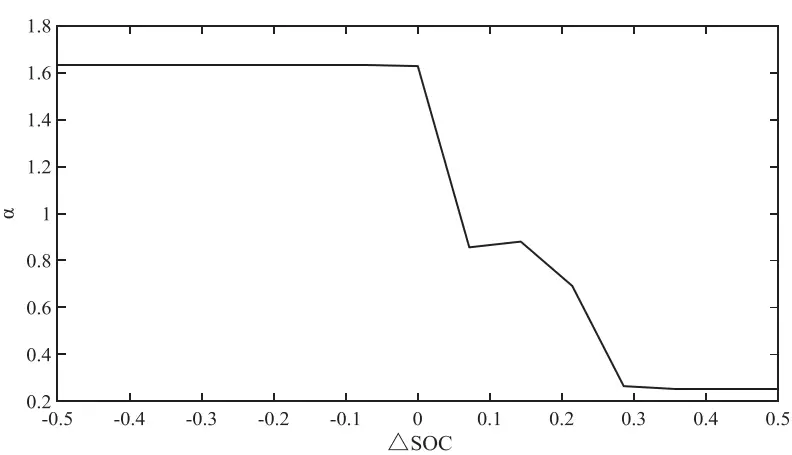
修正系数α的规则曲线
3. 劣化工况控制算法设计
由于模糊控制的细节不可控,该策略下的燃料电池易出现劣化工况。为提高燃料电池的使用寿命,基于燃料电池保护优先的控制方法,根据控制需求对模糊控制策略进行补充。
(1)加权均值滤波算法平滑燃料电池的输出功率
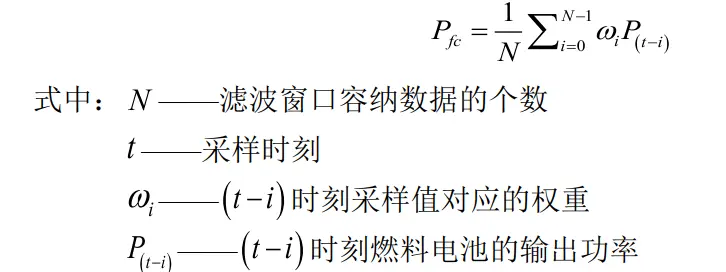
燃料电池输出功率的频繁波动会加剧其寿命衰减,因此通过加权均值滤波算法对其输出功率进行平滑处理,以达到降低高频功率输出的目的。燃料电池的功率输出信号是一组离散的时间信号,滤波窗口沿离散时间序列连续滑动采样 N 个数据,每采样一次,移动一次滤波窗口,然后将滤波窗口内 N 个采样时刻对应的功率值进行加权平均。各功率值所占权重由其采样时刻与当前采样时刻 t 的时间差决定,差值越大,所占的权重越小;
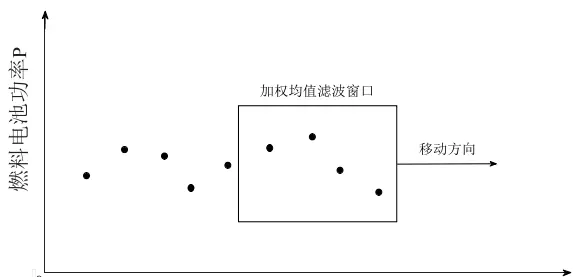
加权均值滤波算法示意图
对每次滑动后滤波窗口内的 N 个值进行加权平均,即可求得一组经过平滑处理的功率输出信号。在满足燃料电池重卡动力系统瞬态响应能力的前提下,综合考虑燃料电池输出功率变载速率范围和动力电池峰值充放电能力对 N 值进行选取。N 取值太小会达不到平滑燃料电池输出功率的目的,取值太大则会出现燃料电池输出功率过度平滑的问题,进而影响燃料电池正常的输出能力,导致整车性能降低。为兼顾燃料电池的输出功率平滑度和正常功率输出的能力,本文选取滑动滤波窗口的数据容纳个数 N 为 4
4. 对燃料电池输出功率的变载速率进行限制
大幅变载工况会加剧燃料电池的寿命衰减,为保护燃料电池,通常根据燃料电池供应商反馈的变速速率限值对经过平滑处理的输出功率的变化速率做进一步的限制。
3.1.3 等效氢耗最小ECMS能量控制策略
该策略通过将动力电池的电能等效为燃料消耗,在不考虑动力电池内阻及其带来的充放电过程能量损耗,蓄电池充放电时的等效燃料消耗Cbat:
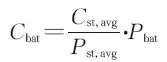
式中Cst,svg 为燃料电池的平均燃料消耗率;Pst,avg 为燃料电池的平均输出功率;Pbat 为蓄电池的瞬时功率。系统的等效燃料消耗函数为:
Csys = Cst + γ (SOC) Cbat
式中的 γ 为 SOC 补偿系数,用以保证高压动力电池的SOC在合理的范围内,其值为:
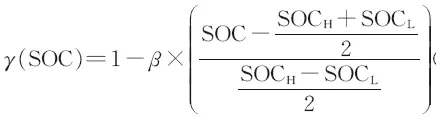
SOCH 为SOC 的给定最高限值;SOCL 为SOC的给定最低限值;β 为等效因子(0 < β < 1)。将系统等效燃料消耗Jmin作为优化目标:

设置优化问题的限制条件如下:
燃料电池的输出功率与高压动力电池的输出功率之和等于整车的功率需求;
高压动力电池输出功率在其当前SOC决定的输出范围内;
燃料电池的输出功率在其允许的最大值、最小值范围内;
燃料电池系统的输出功率变化率满足电堆系统供应商提出的需求(如34Kw/S);
燃料电池系统工作的最小功率需满足电堆系统供应商提出的需求(如24Kw);
在ECMS控制策略中,等效因子的作用是调节高压电池的SOC调整到目标值的快慢,若等效因子选取过大,会导致动力电池SOC较高时过量用电,当SOC很快降低后,则会为了充电使氢耗大为增加,最终增大了氢燃料消耗,如果等效因子选取过小,当SOC降低后充电过慢,可能导致SOC过低,影响蓄电池的输出效率和使用寿命,因此等效因子的制定与高压动力电池的SOC有很大的关系;因此在制定等效因子时应考虑高压电池SOC,当SOC很高时,增大等效因子以利用蓄电池的空余能量,当SOC很低时,也要增大等效因子,以快速维持高压动力电池SOC,当SOC处于合理范围内时则应降低等效因子,既可以更好维持SOC,也可以降低等效因子,因此设置等效因子β

当SOCH 与SOCL 分别取为0. 8、0. 2 时,最优等效因子随 SOC 变化如下图 所示。可以看出,当蓄电池 SOC 接近SOCH 或SOCL,最优等效因子β 接近1;当蓄电池SOC 接近(SOCH + SOCL)/2 时,最优等效因子β 趋近于0,与以上分析中的理想最优等效因子具有相同的特性。
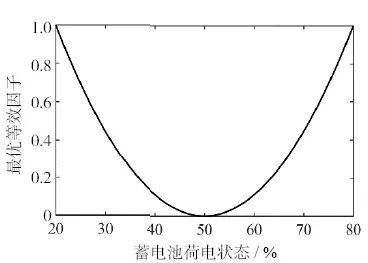
最优等效因子-动力电池SOC曲线
3.2 制动能量回收优化
制动能量回收控制策略的主要步骤为:制动时制动控制器(如EBS)根据驾驶员踩制动踏板的行程计算驾驶员需求的总制动力,在满足制动强度需求及制动稳定性的前提下进行前轴、后轴的制动力分配,之后在将分配到后轴的制动力进行电制动和机械制动的分配,原则为尽量使用电制动减少机械制动的使用,当电机制动不满足制动力需求时,由机械制动进行补偿,保证车辆平稳减速,同时在电制动和机械制动的衔接过程不能对驾驶员的制动感受产生影响。另外在电制动过程中若激活制动防抱死ABS或激活车身稳定性控制ESC相关功能,需要退出电制动,由EBS进行机械制动控制。
3.2.1 再生制动的系统结构
如下图再生制动系统主要包含如下组成部分:
制动阀(脚阀):采用电和气双回路设计,通过双踏板位移传感器监测驾驶员的制动意图;
桥控模块:分为前桥控制模块、后桥控制模块,中桥控制模块(3轴车装备),桥孔模块能够通过电磁阀控制对应轴左右轮的制动气压,其有两种工作模式:电控模式和气控模式,实现冗余备份,当电控模式出现故障时,系统进入气控状态;
储气筒:通过打气泵将空气打入储气筒,维持制动系统的气压;
制动器(弹簧缸):轮端产生制动力的器件;
轮速传感器:检测各轮的轮速,接入EBS控制器,用于路面附着系数识别等;
电控制动控制器EBS:作为制动的主控模块,采集各传感器的信号,进行制动力计算、分配,协调电制动及机械制动等;
电机/电控:在制动过程电机处于发电模式,提供反向的制动扭矩;
高压电池等:在制动过程中存储回收的电能。
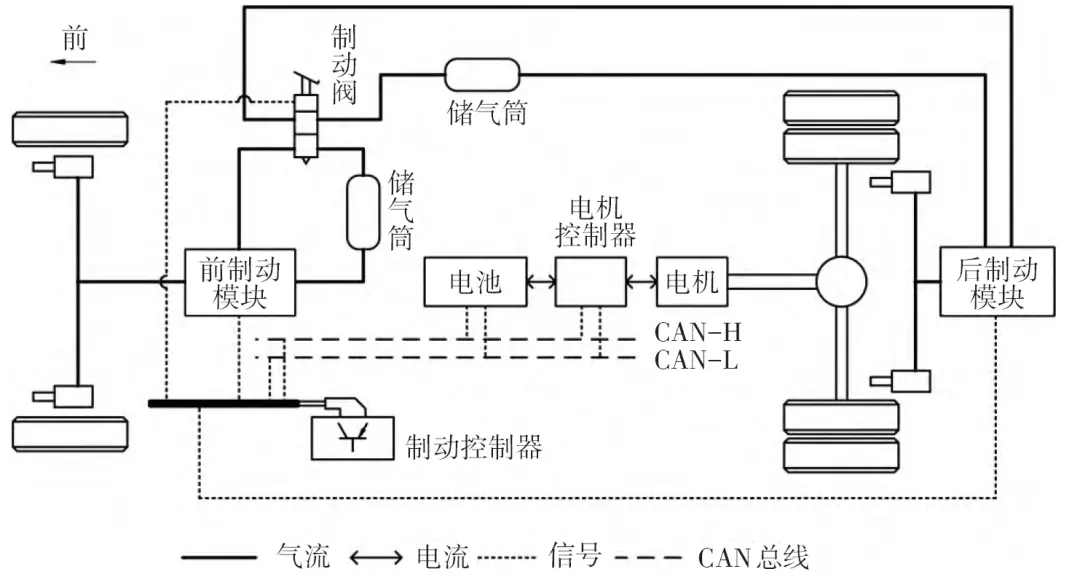
再生制动系统结构
3.2.2 再生制动控制策略
1. 前后制动力分配
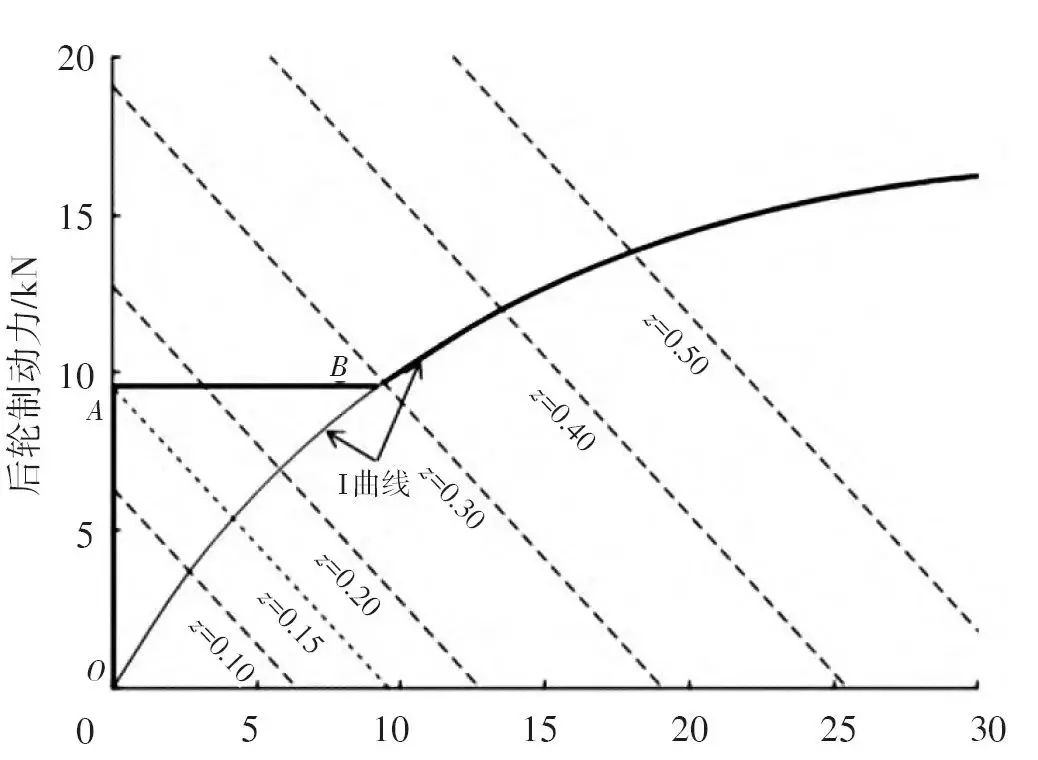
前后制动力主要根据理想制动力分配曲线、GB12676标准及常用循环工况减速度分布情况进行分配,在保证制动稳定性的前提下,尽可能将制动力分配到后轮。根据汽车理论,理想制动力分配曲线及前后轮同时抱死,对路面附着条件的利用、制动时的方向稳定性均较为有利。
为了实现最大化的制动能量回收,并且兼顾制动稳定性,考虑常用工况下的制动强度在某一标定值以下(如0.15),故在制动强度0.15以下时将制动力全部分配到后轮,在制动强度大于0.15时前轮机械制动逐步介入,依据以上原则将制动过程大致分为如下图3段:
0A段:此时制动强度降低,将制动力全部分配到后轮,通过电机回馈制动;
AB段:其制动强度相对较高,需要前后轮共同提供制动力;
B段之后:则按照理想制动分配曲线(I曲线)进行前后桥的制动力分配;
2. 电机回馈扭矩计算
电机的最大回馈扭矩受当前电机转速、电机的温度、高压系统的状态、高压动力电池的SOC以及充电功率限制,在进行电机的制动扭矩计算时要考虑如下因素:
电机回馈的最大电压、回馈电流不能超过高压动力电池当前的瞬时充电电流限值,通常在SOC较高时电池的可充电电流会降低,因此为了提高制动能量回收的效率,通常避免高压动力电池的SOC过高,但是如上3.2章节所述,高压动力电池在氢燃料电池重卡车型上需要承担动态工况“削峰填谷”的作用,电池的SOC也不能太低。如何根据不同的驾驶工况动态调整高压电池的目标SOC将是一项复杂且重要的工作,如结合高阶智能驾驶系统高精地图信息预测前方道路的拓扑、道路交通情况等,在上坡前适当提高动力电池目标SOC,在长下坡前适当降低动力电池SOC,从而最大化的进行制动能量回收;
当前电机的回馈扭矩限值,EBS需要接收各中桥及后桥的各电机回馈扭矩限值,从而在分配到电制动的扭矩不能超过当前电机的扭矩限值;
ABS或ESC激活时要退出制动能量回收,在ABS激活或ESC激活等紧急工况下,电制动不能满足实时要求,需要通过机械制动进行控制;
当采用分布式驱动形式时,制动时需要考虑分布式电机之间的扭矩协调及分配。
3.3 基于效率的电机转矩分配优化
在相同的行驶工况下,驱动系统需要输出相同的转速与转矩,即输出功率一致。转矩优化分配的意义在于提高驱动系统的效率,从而降低电池的输入功率。则转矩的最优分配问题可以简化为前后轴之间的转矩分配系数 λ 的最优解问题:
λ = Tf /Td, Td = Tf + Tr
式中: λ 为前轴转矩的分配系数,当前置电机作为主驱电机时,0.5 ≤λ≤1; Tf 为前 轴 需 求 的 转 矩( N·m) ; Tr 为后轴需求的转矩( N·m) ; Td 为总的转矩需求( N·m) 。所选用电机的效率 map如下图,
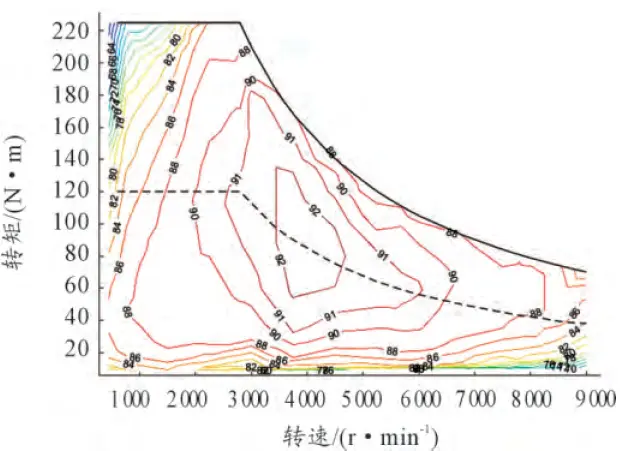
驱动电机效率Map
同时将电机的输出效率 η 看做一个是关于电机转矩 T 与转速n 的函数 η( T,n) 。驱动系统的能量利用率为
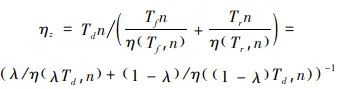
综上,得到驱动系统效率最优的数学模型为
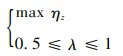
约束条件为
其中 Tmax 为当中轴电机能够提供的最大转矩。上式表示电机能够提供的最大输出特性的限制。利用 Matlab 进行数值求解,得到 λ 关于转矩 T 与转速 n 的最优效率
分配系数如下 λ 所示
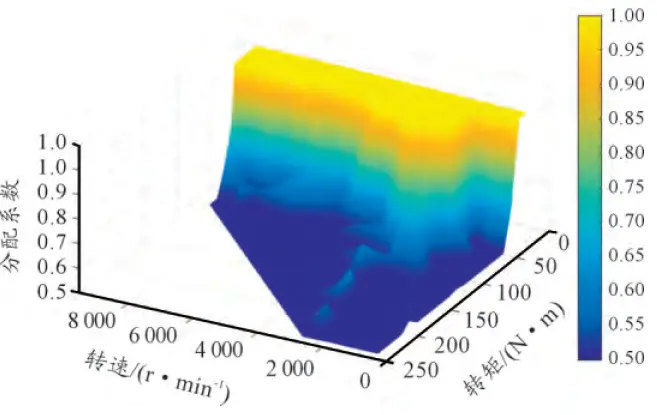
从上图可以看出分配系数在0.5和1的区域分布最广,说明在低转矩需求下,可由单电机工作提供汽车行驶所需的动力,此时λ = 1,当动力需求较大时,整车的转矩需求由前后平均分配(前后电机相同),此时λ = 0.5,这样可以避免单个电机工作在边缘的低效区;
对于采用分布式驱动的动力系统,如三电机(中桥集成桥+后桥分布桥)、四电机(中桥后桥分布桥),此在考虑上述基于经济性最优的电机转矩分配基础上,还有考虑基于稳定性的转矩分配,在高附着系统路面上即通过优化电机转矩分配实现电机效率最大化,在低附着系数路面上,则采用基于稳定性的电机转矩分配,从而保证车轮的滑移率在最优的滑移率附近。
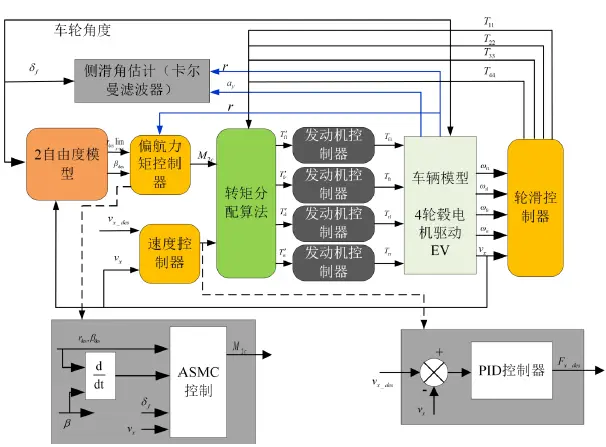
基于稳定性的扭矩控制示意
3.4 基于余热回收的热管理优化
燃料电池汽车整车热管理系统主要将驾驶室热管理、燃料电池热管理、动力电池热管理及电机及高压附件热管理等进行整合,统一协调管理,改变原有的相对独立管理方式。由于热泵空调具有高效、节能、冷热一体化调节的特点,故可基于热泵空调系统设计一种夏季可为驾驶室制冷、为燃料电池和动力电池散热,冬季可为驾驶室制热、为燃料电池和动力电池预热保温、电池组及电机余热再利用的整车热管理方案。
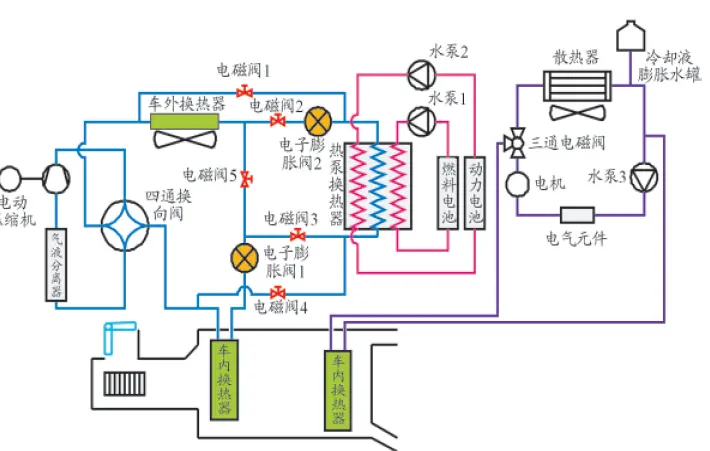
燃料电池汽车整车热管理系统原理示意图
热管理系统原理如上图所示。整车热管理系统由热泵空调循环回路、燃料电池循环回路、动力电池循环回路、电机冷却循环回路等4 个循环回路组成。热泵空调循环回路中共有1 个四通换向阀和5 个电磁阀用于调节回路中制冷剂的循环路径与方向,通过电动压缩机调节回路中制冷剂流速。燃料电池回路和动力电池循环回路分别通过水泵1 和水泵2调节回路中制冷剂流速。电机冷却回路中有1 个三通电磁阀用于调节回路中制冷剂的路径,通过水泵3 调节回路中制冷剂流速。热泵空调循环回路与燃料电池循环回路、动力电池循环回路在热泵换热器中实现热量交换; 电机冷却循环回路通过车内换热器与驾驶室实现热量交换。由于电机只需要冷却而不需要预热,因此将电机冷却循环回路单独设置,不与热泵空调循环回路进行热量交换。各循环回路通过调节冷却剂流速达到温度调节的目的。
整车热管理系统的工作模式通过逻辑门限值控制策略进行调节,采集实时环境温度Tamb、驾驶室温度Tcab、燃料电池温度Tful、动力电池温度Tpow、电机温度Tm。逻辑门限值控制状态的逻辑关系如下图所示。
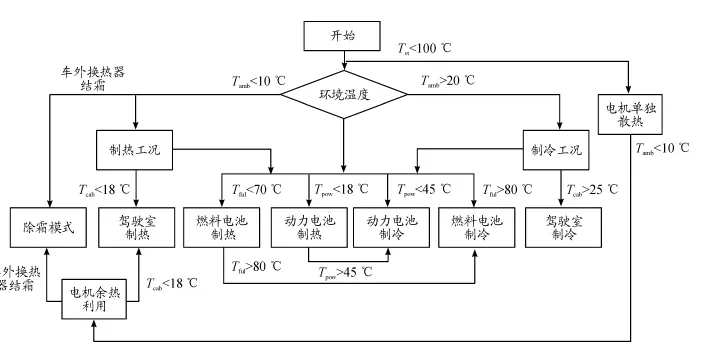
热管理系统逻辑门限值逻辑关系框图
根据逻辑门限值控制,整车热管理系统分为以下具体工作模式:
模式1 驾驶室单冷: 环境温度Tamb > 20 ℃,驾驶室温度Tcab > 25 ℃,燃料电池温度80 ℃ >Tful > 70 ℃,动力电池温度45 ℃ > Tpow > 18 ℃。四通换向阀转至制冷位,开启电磁阀5,关闭其余4 个电池阀。
模式2 驾驶室制冷、电池组散热: 环境温度Tamb > 20 ℃,驾驶室温度Tcab > 25 ℃,燃料电池温度Tful > 80 ℃,动力电池温度Tpow > 45 ℃。四通换向阀转至制冷位,开启电磁阀2、4 和5,关闭电磁阀1 和3。
模式3 驾驶室制冷、电池组预热: 环境温度Tamb > 20 ℃,驾驶室温度Tcab > 25 ℃,燃料电池温度Tful < 70 ℃,动力电池温度Tpow < 18 ℃。四通换向阀转至制冷位,开启电磁阀1 和3,关闭电磁阀2、4 和5。
模式4 驾驶室单热: 环境温度Tamb < 10 ℃,驾驶室温度Tcab < 18 ℃,燃料电池温度80 ℃ >Tful > 70 ℃,动力电池温度45 ℃ > Tpow > 18 ℃。四通换向阀转至制热位,开启电磁阀5,关闭其余4 个电池阀。
模式5 驾驶室制热、电池组预热: 环境温度Tamb < 10 ℃,驾驶室温度Tcab < 18 ℃,燃料电池温度Tful < 70 ℃,动力电池温度Tpow < 18 ℃。四通换向阀转至制热位,开启电磁阀2、4 和5,关闭电磁阀1 和3。
模式6 驾驶室制热、电池组散热: 环境温度Tamb < 10 ℃,驾驶室温度Tcab < 18 ℃,燃料电池温度Tful > 80 ℃,动力电池温度Tpow > 45 ℃。四通换向阀转至制热位,开启电磁阀1 和3,关闭电磁阀2、4 和5。
模式7 电池组热源除霜模式: 环境温度Tamb < 10 ℃,燃料电池温度Tful > 80 ℃,动力电池温度Tpow > 45 ℃,车外换热器结霜。四通换向阀转至制冷位,开启电磁阀2 和4,关闭电磁阀1、3和5。
模式8 驾驶室热源除霜模式: 环境温度Tamb < 10 ℃,燃料电池温度Tful < 70 ℃,动力电池温度Tpow < 18 ℃,车外换热器结霜。四通换向阀转至制冷位,只开启电磁阀5,关闭其余4 个电磁阀。
模式9 电池组单独热管理、电池组单独散热: 开启电磁阀1 和4,关闭电磁阀2、3 和5。当环境温度20 ℃ > Tamb > 10 ℃,驾驶室不需制冷或制热; 燃料电池温度Tful > 80 ℃,动力电池温度Tpow >45 ℃,进入电池组散热工况; 燃料电池温度Tful <70 ℃,动力电池温度Tpow < 18 ℃,进入电池组预热工况。
模式10 电机散热模式: 当电机温度Tm >100 ℃,电机进入散热模式: 当环境温度Tamb <10 ℃,电机余热利用,否则电机单独散热。
3.5 低压系统能量管理优化
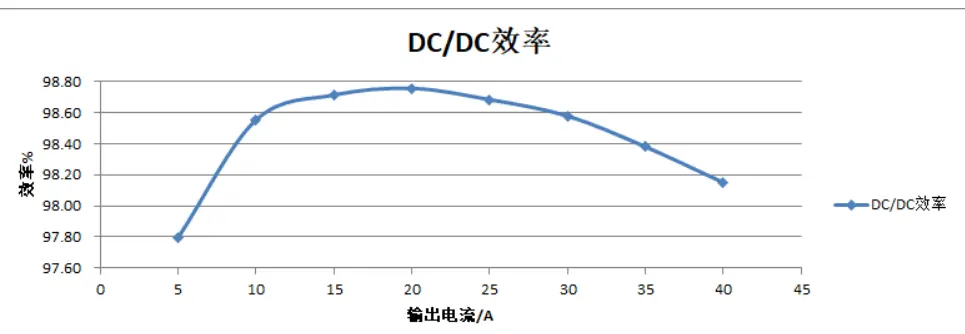
1. DC-DC工作模式优化:
在重卡不同的工况下,提高24VDCDC的转换效率,使其尽量工作在高效区,例如在智能补电功能开启时应提高DCDC的输出电压,采用高功率补电模式,降低在补电期间整车各高压部件的能量消耗,尽量缩短补电时间;同时可在充电期间,采用DCDC间隔工作的模式,因为充电时整车的低压用电器功率相对行驶工况较小,采用间隔工作模式可使DCDC尽量工作在高效区,在低压蓄电池SOC较高时停止DCDC输出,尽量由低压蓄电池供给整车低压用电器的功率消耗,当低压蓄电池SOC低于设定的阈值,再启动DCDC给整车负载供电以及蓄电池充电。
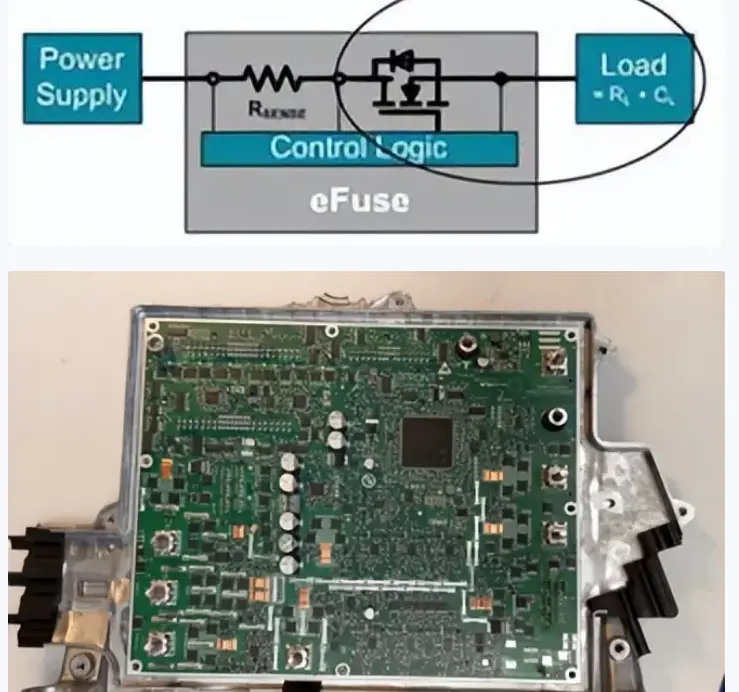
2. 电源分配优化
通过采用智能MOS代替传统的保险和继电器,可降低整车导线回路,缩减导线线径,据统计采用智能配电后整车线束成本可降低28%左右,同时当采用智能配电后,可基于车辆不同的工况及场景,关闭无工作需求的负载,降低整车的低压功率消耗。
04 总 结
基于氢燃料电池车型在未来高载重、长续航场景应用的必然趋势,以及燃料消耗成本在整个重卡TCO中的较大占比,梳理了OEM需要重点关注并不断优化的方向,包含燃料电池与高压电池的功率分配优化,再生制动的能量优化、基于效率的电机转矩分配优化、基于余热回收的热管理系统优化以及低压系统能量管理优化等,上述优化方向将对氢燃料电池重卡的燃料消耗成本降低带来巨大的贡献,但是上述内部并不完全覆盖所有能够带来氢耗降低的方法,其他如采用800V SiC IGBT提高高压系统的能量转化效率,采用48V供电系统降低低压系统能耗,降低整车自重等都可以带来氢耗的降低,在此不能一一列举,借助于本文自己也对氢燃料电池重卡能量管理有了一个相对清晰的脉络,同时分享给对该话题感兴趣的同行,希望有所帮助。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
