




 广告
广告





















































标准解读丨深圳地标《智能网联汽车自动驾驶系统技术要求 第1部分:高速公路及快速路自动驾驶》解读

2023年8月26日,在“2023中国智能网联汽车燕子湖峰会暨湾区智联试验场启动仪式”上,深圳市智能网联汽车10项地方标准正式发布,10项地标以推荐性国家标准《智能网联汽车 自动驾驶系统通用技术要求》(计划号:20213608—T —339)(2022年9月版本)、GB/T 41798—2022《智能网联汽车 自动驾驶功能场地试验方法及要求》、 推荐性国家标准《智能网联汽车 自动驾驶功能道路试验方法及要求》(计划号:20213609—T—339) (2022年9月版本)为基础制定,内容涵盖自动驾驶系统设计运行条件、自动驾驶系统技术要求、自动泊车系统技术要求、汽车软件升级技术要求等方面。中汽研科技有限公司(简称“中汽研科技”)牵头协助深圳市工业和信息化局完成10项地标的技术方案编写。
中汽研科技智能网联汽车研究部部长郭魁元介绍,《智能网联汽车自动驾驶系统技术要求 第1部分:高速公路及快速路自动驾驶》规定了高速公路及快速路自动驾驶系统的总体要求、动态驾驶任务执行要求、动态驾驶任务后援要求以及人机交互要求,规程主要针对装备高速公路及快速路自动驾驶系统的M、N类车型,明确了自动驾驶功能测试的相关要求和内容。
01 交通信号识别及响应
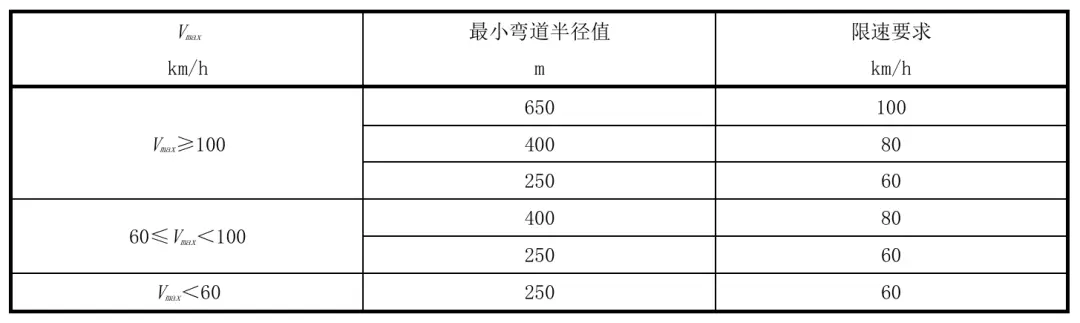
此场景测试用以检测ADS能够识别及响应交通信号,并做出合理的控制策略。其中包含限速标志及弯道标志识别工况。其中弯道场景要求试验道路为长直道和弯道的组合道路,弯道长度应保证试验车辆在弯道内至少行驶 5 s,被测车辆Vmax与弯道最小曲率半径对照表如下表所示。
02 道路交通基础设施与障碍物识别及响应
本场景用以检测ADS通过不同交通基础设施时是否能保持车辆在本车道内以稳定状态行驶。同时证明ADS能够对交通基础设施和障碍物进行识别,并做出合理的控制策略响应,避免于道路交通基础设施或障碍物发生碰撞。其中包含隧道、匝道、收费站、施工车道及交通事故5个测试工况。
03 周边车辆行驶状态识别与响应
此场景用以检测自动驾驶系统在定义的速度范围内是否可正确识别车辆周围的静止车辆、行驶车辆、切入、切出车辆、道路使用者或完全或部分堵塞的车道等,并能够及时响应,保持与前方车辆所需的安全距离,避免发生碰撞。
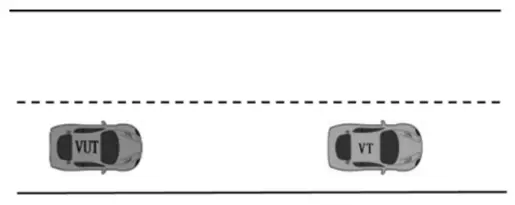
1 静止车辆占用部分车道
该场景主要考察试验车辆在没有交通标识的情况下,当前车道被部分占用,并且相邻车道被大部分占用的情况下,试验车辆的处理方式。
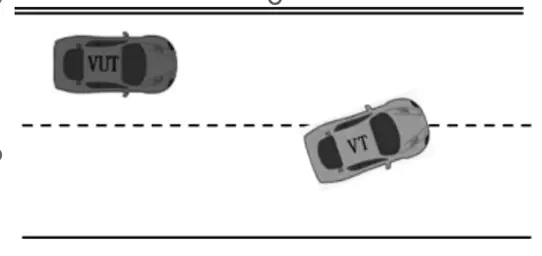
静止车辆占用部分车道场景示意图
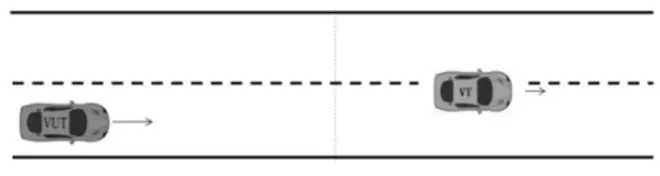
2 前方车辆切入
该场景考虑了在长直道上前方车辆忽然切入的常见情况:试验车辆于内侧车道行驶,目标车辆以预设速度匀速行驶,目标车辆由外侧车道开始切入内侧车道并完成换道,且目标车辆在切入过程中和切入完成后其纵向速度均等于预设速度。
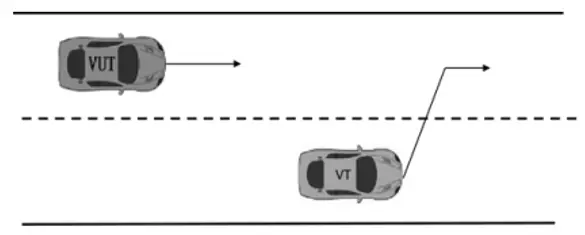
前方车辆切入场景示意图
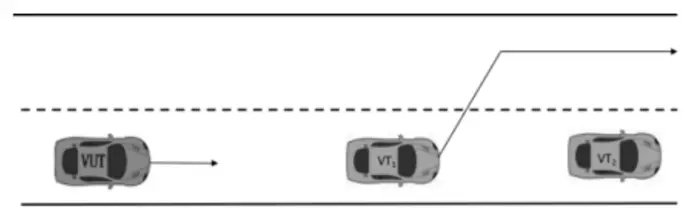
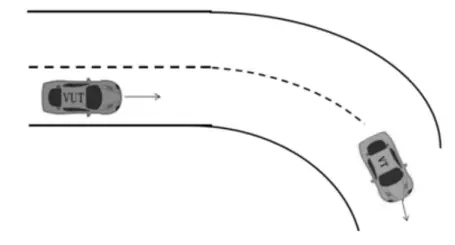
3 前方车辆切出
前方车辆切出场景包括试验车辆(VUT)、目标车辆(VT1)、目标车辆(VT2)。要求试验道路应至少包括单向双车道的长直道,试验车辆与VT1位于同一车道,VT2位于相邻车道。试验车辆在外侧车道驶向VT1,当VUT稳定跟随VT1后,VT1开始换道,此过程VT2的最前端保持与VUT最后端3m以内的距离行驶。
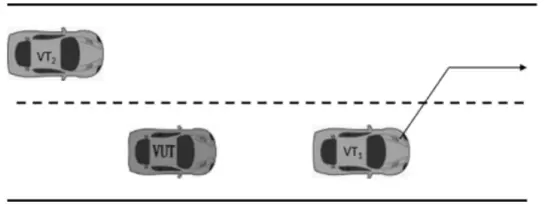
前方车辆切出场景示意图
4 目标车辆停一走
试验道路为至少包含单向双车道的长直道,中间车道线为白色虚线;外侧车道内存在以 Vmax的 75 % 匀速行驶的目标车辆。
目标车辆停一走场景示意图
该场景对车辆的巡航能力有着一定的要求,当前车刹停并再次起步时,该场景给了两个选择项——保持跟车,先刹停再启动以及进行变道超车。虽然无论哪一种形式的处理,都能够保证车辆不出现安全事故,但是在能够轻松变道的场景下,变道超车这一处理方式明显更加符合人类驾驶员的驾驶习惯。
5 目标车辆切出后存在静止车辆
目标车辆切出后存在静止车辆场景示意图
试验道路为至少包含单向双车道的长直道,中间车道线为白色虚线。外侧车道内存在两辆目标车辆 (VT1和 VT2),其中 VT1以预设速度驶向静止状态 VT2,两辆目标车辆的中心线偏差不超过 0.5 m。
要求试验车辆稳定跟随 VT1在相同车道内行驶,当 VT1距离 VT2预碰撞时间首次到达预设区间内时执行换道动作驶入相邻车道,完成换道时间不大于 3 s。
该场景是“前车切出”场景的复杂进阶,它考验当前车切出后,试验车辆加速行驶过程中遇到静止车辆的处理过程。
6 前方车辆紧急制动
试验道路为仅有一条车道的长直道且两侧车道线为实线;车道内存在以 Vmax的 75 %匀速行驶的目标车辆。
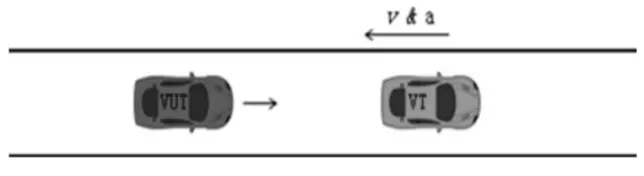
前方车辆紧急制动场景示意图
本场景主要考验的是测试车辆对其他车辆的识别能力和决策、响应的速度以及自动紧急制动AEB的能力。
7 摩托车同车道行驶
试验道路为至少包含单向双车道的长直道,中间车道线为白色虚线。摩托车以 20 km/h~30 km/h 速度于距离本车道右侧车道线内侧 1 m~2.5 m 范围内沿外侧车道行驶。若跟随摩托车行驶,当试验车辆速度不大于 30 km/h 时,且持续时间超过 5 s 后,摩托车从车道右侧离开当前车道。
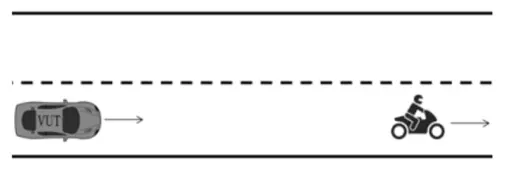
摩托车同车道行驶场景示意图
该场景主要考验试验车辆对摩托车的识别以及对当摩托车同车道行驶时的决策。
8 直道前车缓行
测试道路为至少包含两条车道的长直道,试验车辆驶向前方压线缓慢行驶的目标车辆 VT,VT 速度为试验车辆 Vmax-40 km/h,且试验车辆所在车道左侧车道线中心线与目标车辆 VT 车身宽度 20 %处重合。
直道前车缓行场景示意图
9 弯道前车缓行
弯道前车缓行场景示意图
测试道路为至少包含两条车道的长直道与弯道的组合,弯道半径范围为 250 m~650 m,试验车辆驶向前方压线缓慢行驶的目标车辆 VT,VT 速度为试验车辆 Vmax-40 km/h,VT 最低试验车速为 10 km/h,且试验车辆所在车道左侧车道线中心线与目标车辆 VT 车身宽度20% 处重合。
04 行人横穿及响应
该场景模拟高速行驶状态下不同行人突然横穿道路的场景。在本场景中,还应包括不同的行人速度、行走方向以及不同的行人类型(成年、儿童)。
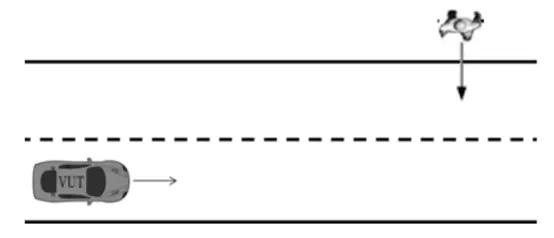
行人横穿及响应场景示意图
该场景主要验证试验车辆在忽然出现行人的情况下的应急措施(紧急制动或者紧急变道等)。
05 动态驾驶任务干预及接管
该场景主要为了证明试验车辆具有在某些突发情况下,驾驶员需要接管干预车辆的时候能够及时退出自动驾驶模式,并且不自动恢复,以确保某些突发情况或者自动驾驶系统无法处理的情况下,车辆驾驶员以及其他交通参与者的安全。
因此,该场景需要考虑a)在不同曲率半径的路段。b)不同的动态驾驶任务干预模式。c)其他危险场景下执行动态驾驶任务干预。
06 最小风险策略
本场景旨在判断试验车辆在自动驾驶系统遇到超出设计范围的场景时,能否正确发出超出设计运行范围的提示信息。
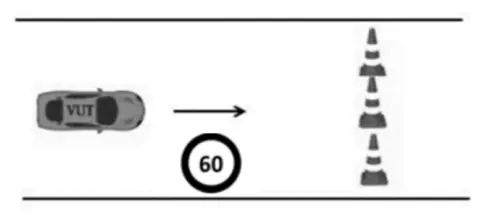
最小风险策略场景示意图
为全面覆盖深圳市地方标准测试规程,场地和设备尤为重要。中汽研科技具备完善的高精度自动驾驶测试平台,运营拥有多样化高快速场景的湾区智联试验场,具备支撑深圳地标的测试能力。未来,中汽研科技将持续推进深圳地标的相关测试及标准改进,助力深圳市及粤港澳地区自动驾驶汽车加快落地。
- 下一篇:奇石乐压装测试中心乔迁新址,服务新升级!
- 上一篇:高效的深度4D车载雷达里程计方法







最新资讯
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
