




 广告
广告





















































ENCAP对驾驶员状态监控DSM的测试要求

为了有资格得分,主机厂必须通过留档证明:其DSM系统符合ENCAP2023中规定的一般要求和适应性要求。
为了取得对应测试项的得分,主机厂还必须通过留档证明:其DSM系统符合ENCAP2023中规定监测要求和相关响应要求。
1.测试设备
2.测试条件
3.测试步骤
ENCAP秘书处将审查主机厂提供的DSM留档,并要求测试实验室在授予积分之前抽查一些分心、疲劳和无响应驾驶员情况。本文主要是DSM抽查测试的要求,在测试开始之前,必须向ENCAP秘书处提供OEM的留档。
1.测试设备
以至少25Hz的频率采样和记录所有视频数据。
测量量和相关变量如下表所示:
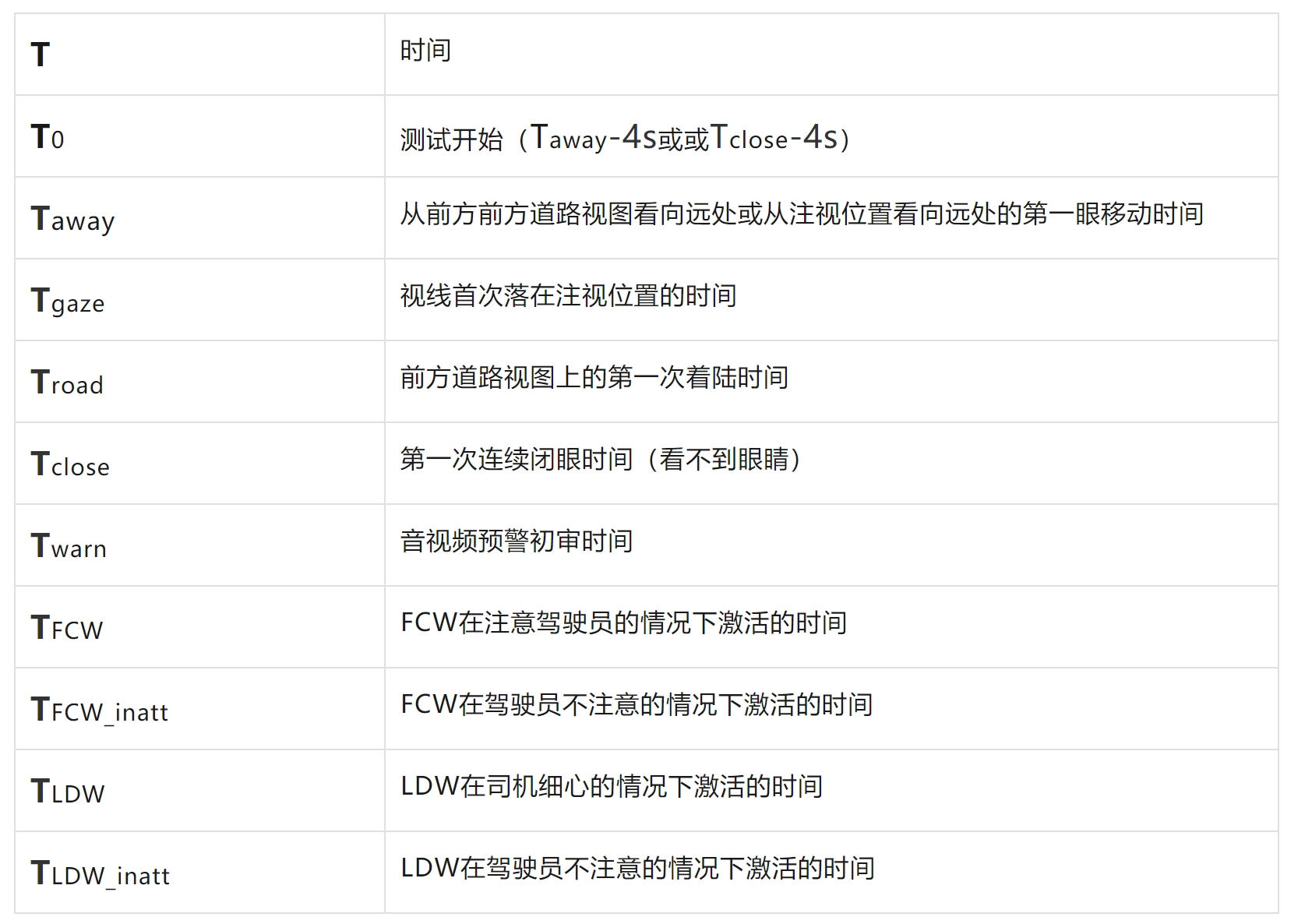
为测试车辆配备数据测量和采集设备,以至少如下所示精度对数据进行采样和记录:
(a)测试车辆速度:0.1km/h;
(b)驾驶员凝视位置;
(c)车内警告。
2.测试条件
2.1 测试轨道
在均匀的实心铺装路面上进行测试。
车道标线的存在可用于DSM测试,车道宽度为3.5至3.7m。这些车道上的车道标记需要符合UN ECE R130法规(联合国商用车LDW要求)附录三中定义的车道标记(主要为《1958年协定国》内的标准车道线,均为实线或虚线,虚线线段长和间隔不同)之一。
2.2 天气条件
对于DSM测试,不得有降水,地面水平能见度应大于1km。
风速应低于10m/s,以尽量减少测试中的目标车干扰。
自然环境照明必须均匀,除测试车或目标车引起的阴影外,不得在测试区域投射强烈阴影。确保在阳光直射时,测试不会朝着或远离太阳进行(避免逆光)。
2.3 车辆准备
在车辆中安装车载测试设备和仪器,以观察测试场景的驾驶员应用和DSM响应的相对时间。还应安装任何相关电缆和电源。

3.测试步骤
3.1 车辆测试前调试
一辆新车被用于交付到测试实验室。
如果主机厂要求,可以在城市和农村混合道路上行驶最多100公里,使用其他交通工具和道路设施(如车道线、护栏等)来“校准标定”碰撞避免技术(FCW和LDW)的传感器系统,校准过车避免剧烈加速和制动。
在评估FCW和LDW优化(灵敏度提升效果)时,以FCW/LDW系统正常工作的最低速度执行最多十次运行,以确保:驾驶员注意力不集中的时,FCW/LDW系统灵敏度提升测试之前,FCW/LDW系统在正常运行。
3.2 测试场景
DSM系统的性能在不同的测试场景中进行评估。为了主动分散驾驶员注意力,以下部分考虑了这些场景。
3.2.1 分心
将使用猫头鹰(头部运动)、蜥蜴(眼睛运动)和身体倾斜等行为评估驾驶员的分心检测,主要分为三个方面:长分心、短分心(VATS)和手机使用。
长分心:长时间的分心事件被认为是驾驶员从前方道路转向一个非前方道路的位置持续凝视≥3秒。
短分心(VATS):短暂的分心(或视觉注意力分时VATS)事件被认为是驾驶员注视点从前方道路转向一个或多个不同位置的累积。短暂的分心事件是指注视点从前方道路多次离开的累积,当驾驶员的注意力回到前方道路足够长的时间以使驾驶员完全掌握了道路情况时,被认为是短暂的分心事件的结束。
手机使用:手机使用被认为是一种特定类型的短暂分心(或视觉注意力分时VATS)事件,指的是驾驶员反复注视他们的手机。

3.2.2 疲劳
通常认为疲劳是一种随着时间积累的典型行为。ENCAP 奖励对疲劳不同阶段的检测和反应:困倦、微睡眠和睡眠。
困倦:驾驶员的疲劳状态对驾驶员专注于驾驶任务的能力产生不利影响,一般指KSS值达到7。
微睡眠:微睡眠的常见症状是<3秒的闭眼,尽管ENCAP认识到非闭眼的微睡眠事件也是可能的。
睡眠:在这个评估中,当显示持续闭眼>3秒时,驾驶员被认为是在睡觉。
3.2.3 无响应驾驶员
无响应驾驶员:司机在驾驶过程中可能是由于突然生病,变得无反应。最初,无反应的司机很可能被确定为分心或睡着了。
3.3 测试行为
测试驾驶员的体态应介于AF05~AM95范围之间,将座椅位置和驾驶控制(例如方向盘)调整到驾驶员安全驾驶车辆的舒适位置,并允许DSM清晰地看到驾驶员的脸。
在开始测试之前,以≥10km/h的速度全神贯注地驾驶车辆至少1分钟,以允许DSM时间识别驾驶员并启用系统。如果在此期间DSM系统报有故障,需进行调整并重复该过程以启用系统。
在每次旅程开始时检查DSM系统是否默认开启,并且不能通过短暂的单次按下按钮来停用系统。测试驾驶员应记录停用DSM系统所需的操作。
对于自动变速器的车辆,选择D档。对于手动变速器的车辆,选择最高档位,在测试速度下,发动机转速至少为1500转/分钟。如果安装了限速装置或定速巡航控制装置,可以用来保持测试车辆的速度(不是自适应巡航ACC和车道居中控制),除非主机厂认为限速装置或定速巡航装置对DSM系统有干扰。
3.4 测试执行
以20至80km/h的速度沿直线驾驶测试车辆,在T0和Taway之间,驾驶员必须全神贯注地注视前方的道路视野区域。
3.4.1 分心
猫头鹰长时间分心:驾驶员应保持一致的身体姿势(不放松或抬高),头部以自然的移动速度直接转向注视位置。保持注视该位置最多5s,警告发出后,直接将目光返回前方道路视野。
猫头鹰短暂分心:驾驶员应保持一致的身体姿势(不放松或抬高),头部转向注视位置,并以自然的移动速度返回前方道路,在30s的时间段内累计分心10s,如果驾驶员的目光返回前方道路视野区域≥2s,则时间周期将重置。或者,实验室应确认档案中OEM描述的其他干预措施。
猫头鹰手机使用:驾驶员应保持一致的身体姿势(不放松或抬高),头部转向指定的手机位置,并以自然的移动速度返回前方道路,在30s的时间段内累计看手机10s,如果驾驶员的目光返回前方道路视野区域≥2s,则时间周期将重置。或者,实验室应确认另一个档案中OEM描述的干预。
在执行猫头鹰测试时,注视点转换的过程最长时间为0.48秒(12帧@25Hz)。

蜥蜴长时间分心:驾驶员应保持一致的身体姿势(不放松或抬高)和头部位置,眼睛以自然的移动速度移动到注视位置。保持注视该位置最多5秒,警告发出后,直接将目光返回前方道路视野。
蜥蜴短暂分心:驾驶员应保持一致的身体姿势(不放松或抬高)和头部位置,眼睛以自然的移动速度移动到注视位置并返回前方道路,并在30秒的时间段内累计分心10秒,如果驾驶员的目光返回前方道路视野区域≥2秒,则时间周期将重置。或者,实验室应确认档案中OEM描述的其他干预措施。
蜥蜴手机使用:驾驶员应保持一致的身体姿势(不放松或抬高)和头部位置,眼睛以自然的移动速度移动到指定的手机位置并返回前方道路,并在30秒的时间段内累计10秒,如果驾驶员的目光返回前方道路视野区域≥2秒,则时间周期将重置。或者,实验室应确认档案中OEM描述的其他干预措施。
在执行蜥蜴测试时,注视点转换的过程最长时间为0.16秒(4帧@25Hz)。
蜥蜴测试时,允许头部朝远离前方道路视野的区域(如副驾脸部)进行微小的旋转移动。
向后排乘客身体倾斜:运动应该像将视觉注意力从道路和面向前方的位置转移到驾驶员的肩膀上,以专注于后排乘客头部。过程中保持双手握在方向盘上,驾驶员应旋转上身姿势,以猫头鹰般的动作转动头部,以自然的运动速度查看后排乘客头部位置。在该位置保持凝视最多5秒钟,发出警告后,直接返回前方道路视野。
向副驾脚坑身体倾斜:运动应该像将视觉注意力从道路和面向前方的位置转移到副驾脚坑一样进行。过程中保持驾驶员主驾侧的手在方向盘上,驾驶员应倾斜上半身姿势,头部像猫头鹰一样转动,并以自然的运动速度向副驾脚坑中心伸手。保持注视该位置最多5秒钟,发出警告后,直接返回前方道路视野。
在执行身体倾斜测试时,身体倾斜的过程最长时间为1.0秒(25帧@25Hz)。
3.4.2 疲劳
困倦:对于困倦场景,车辆制造商必须提供一份详细说明其车辆如何响应的档案。ENCAP保留DSM系统性能进行实测的权力,以验证档案中的信息。
微睡眠:驾驶员应保持一致的身体姿势(不放松或抬高)和头部位置,闭眼最多4秒。警告发出后,直接返回前方道路视野。或使用主机厂留档中描述的驾驶员微睡眠测试方法,该方法需要被ENCAP认为是可接受和可行的。
睡眠:驾驶员应保持一致的身体姿势(不放松或抬高)和头部位置,闭眼最多7秒。警告发出后,直接返回前方道路视野。或使用主机厂留档中描述的驾驶员睡眠测试方法,该方法需要被ENCAP认为是可接受和可行的。
3.4.3 无响应驾驶员
睡眠选项:驾驶员应保持一致的身体姿势(不放松或抬高),头部向前点头,闭眼至少6秒以开始最小风险操作。或使用主机厂留档中描述的无响应驾驶员测试方法,该方法需要被ENCAP认为是可接受和可行的。
分心选项:驾驶员应保持一致的身体姿势(不放松或抬高),以自然的移动速度将头转向驾驶员膝盖注视位置,并在该位置保持注视至少6秒,以启动最小风险操作。或使用主机厂留档中描述的无响应驾驶员测试方法,该方法需要被ENCAP认为是可接受和可行的。
3.4.4 手握方向盘测试
驾驶员应将手放在方向盘的上部并保持在该位置至少10秒,以阻止安装在仪表盘上的DSM系统识别驾驶员。

3.4.5 FCW时序测试
在AEB前方静止车辆CCRs 100%重叠场景下,使用50km/h的车速进行测试,评估驾驶员注意力集中正常驾驶时FCW的触发时机(TTC),以及驾驶员分心或疲劳时FCW的触发时机。
在驾驶员注意力集中、分心和疲劳三种状态下,各进行3次FCW触发测试。
注意力集中时的FCW时序测试:驾驶员在接近目标车辆GVT时应完全注意前方道路,不要表现出任何分心、疲劳或反应迟钝的迹象。
分心时的FCW时序测试:使用先前评估为功能分心的测试用例,驾驶员应使用猫头鹰或蜥蜴行为来执行分心的场景,以确认系统功能。在与目标车辆GVT的碰撞时间TTC=4s前,驾驶员需要达到长时间分心状态。
疲劳时的FCW时序测试:使用先前评估为疲劳的测试用例,驾驶员应使用微睡眠或睡眠行为执行疲劳情景,以确认系统功能。
微睡眠:在接近静止目标车辆GVT时,驾驶员应保持一致的身体姿势(不放松或抬高)和头部位置,在TTC=TFCW+3s+1s时闭眼3s。或使用主机厂留档中描述的驾驶员微睡眠测试方法,该方法需要被ENCAP认为是可接受和可行的。
睡眠:在接近静止目标车辆GVT时,驾驶员应保持一致的身体姿势(不放松或抬高)和头部位置,在TTC=TFCW+6s+1s时闭眼6s。或使用主机厂留档中描述的驾驶员睡眠测试方法,该方法需要被ENCAP认为是可接受和可行的。
3.4.6 LDW时序测试
在LSS中的单虚线或单实线场景下,使用0.6~1.0 m/s的横向速度按照LSS测试协议进行测试。
评估驾驶员注意力集中,正常驾驶时LDW的触发时机DTLM(Distance To Lane Marking),以及驾驶员分心或疲劳时LDW的触发时机(DTLM)。或者,可以在S形弯道中进行此测试。
到车道标线的距离DTLM(Distance To Lane Marking):是指车辆越过车道标线内侧之前,车道标线内侧与轮胎最外缘之间的剩余横向距离(垂直于车道标线)。车道线内沿内侧为正,车道线内沿外侧为负。
在驾驶员注意力集中和疲劳状态下,各进行3次LDW触发测试。
注意力集中时的LDW时序测试:驾驶员在接近LDW测试时应完全注意前方道路,不要表现出任何分心、疲劳或反应迟钝的迹象。

疲劳时的LDW时序测试:使用先前评估为疲劳的测试用例,驾驶员应使用微睡眠或睡眠行为执行疲劳情景,以确认系统功能。
微睡眠:在接近LDW测试时,驾驶员应保持一致的身体姿势(不放松或抬高)和头部位置,在TTC=TLDW+3s+1s时闭眼3s。或使用主机厂留档中描述的驾驶员微睡眠测试方法,该方法需要被ENCAP认为是可接受和可行的。
睡眠:在接近LDW测试时,驾驶员应保持一致的身体姿势(不放松或抬高)和头部位置,在TTC=TLDW+6s+1s时闭眼6s。或使用主机厂留档中描述的驾驶员睡眠测试方法,该方法需要被ENCAP认为是可接受和可行的。
3.4.7 抽查测试
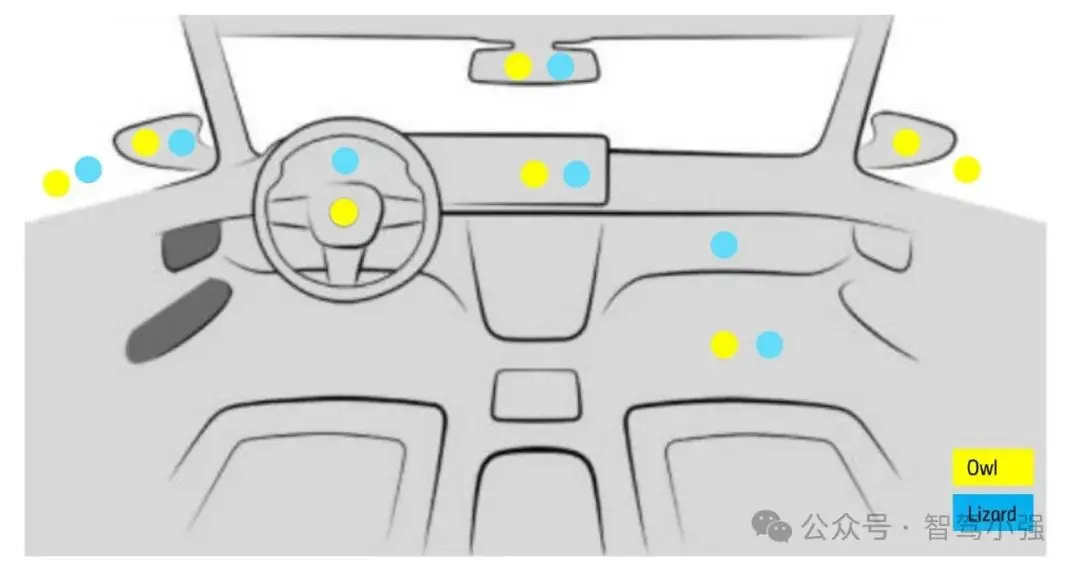
ENCAP秘书处将审查OEM提供的DSM留档,并要求测试实验室在授予积分之前抽查一些分心、疲劳和反应迟钝的驾驶员情况。对OEM留档中声明的分心类型、分心场景和移动类型进行抽查。
留档中应包含不同注视位置的示意图,示例如下:
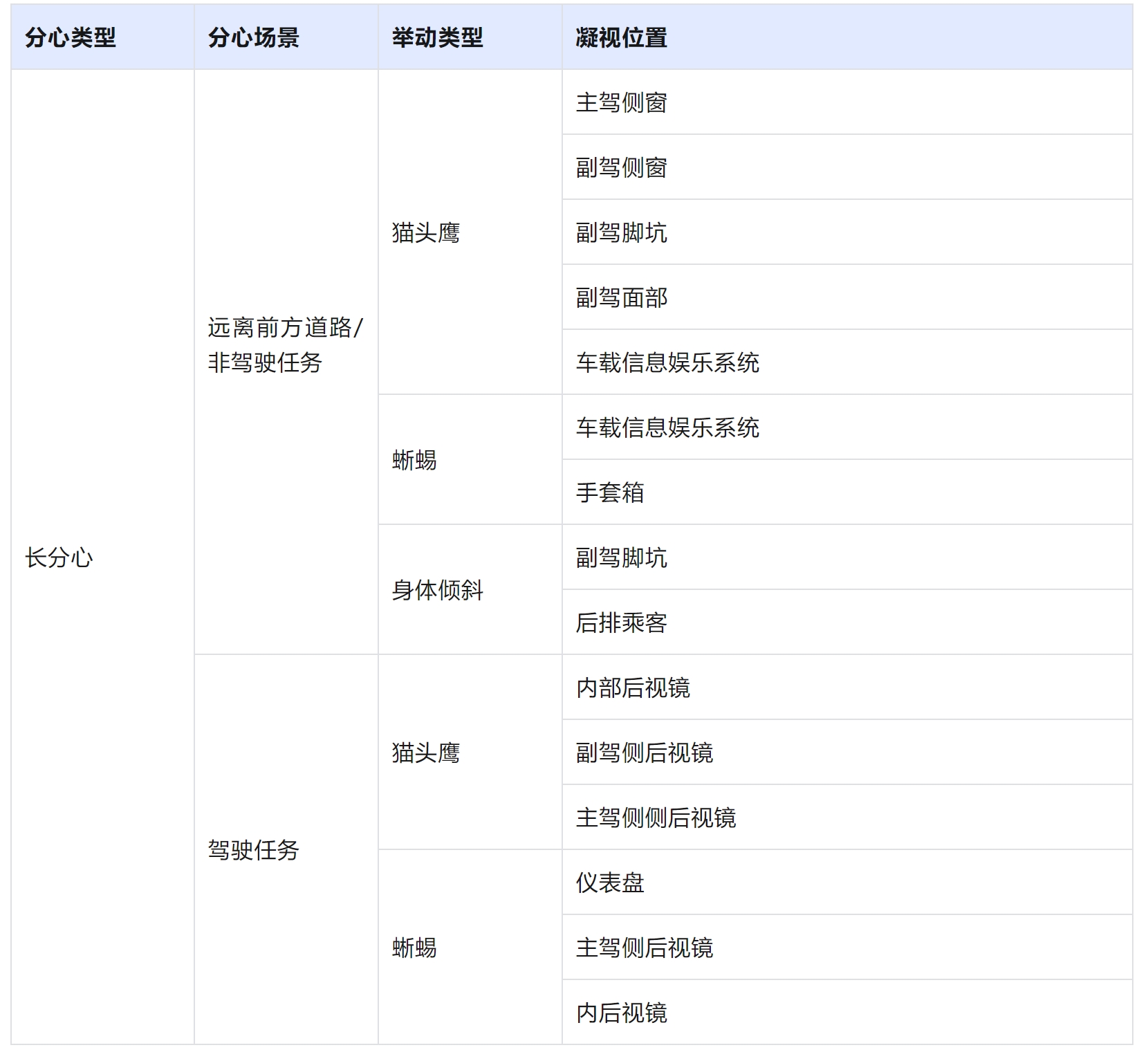
分心抽查:根据OEM提供的DSM留档,司机选择:
长时间分心抽查:根据OEM留档中声称能得分的所有长时间分心场景及动作类型,随机选择一半的注视位置进行现场测试。
对于每个长分心的场景和动作类型,尽可能使用不同的注视位置来扩大评估范围。
短分心抽查:根据OEM留档中声称能得分的所有短分心场景及动作类型,随机选择一半的注视位置进行现场测试。
对于每个分散注意力的场景和动作类型,尽可能使用不同的注视位置来扩大评估范围。

手机使用抽查:根据OEM留档中声称能得分的所有手机使用场景及动作类型,随机选择一半的注视位置进行现场测试。
对于每个分散注意力的场景和动作类型,尽可能使用不同的注视位置来扩大评估范围。

*定位灵活,由负责测试实验室自行决定
3.4.8 遮挡测试
长分心遮挡测试:仅用于猫头鹰和蜥蜴动作(不含身体倾斜)的长分心,使用抽查测试中评估为可得分的3个长分心测试用例,驾驶员应针对每个用例使用不同的遮挡物重复测试。
遮挡物包括以下4种:
(a)前面有帽舌的棒球帽,目的是为用户的眼睛提供阴影;
(b)紧贴头部的无边帽,不遮盖任何主要面部特征;
(c)透光率<15%的墨镜(或EN1836法规中的第3类墨镜);
(d)EN14683法规认证的2R型口罩,通常用蓝布制造。佩戴时覆盖下巴,嘴巴和鼻子,不要遮挡眼睛。
短分心遮挡测试:使用抽查测试中评估为可得分的3个短分心测试用例,驾驶员应针对每个用例使用上述不同的遮挡物重复测试。
电话使用遮挡测试:使用抽查测试中评估为可得分的3个电话使用测试用例,驾驶员应针对每个用例随机选择上述遮挡物重复测试。
疲劳遮挡测试:驾驶员执行微睡眠和睡眠2个测试(如果可以由非疲劳测试驾驶员再现,也可以测试困倦)。使用先前评估为可得分的测试用例,驾驶员应针对每个用例使用上述不同的遮挡物重复测试。
无响应驾驶员遮挡测试:驾驶员执行1个无响应驾驶员测试,如果测试用例证明有效,则驾驶员应使用上述不同的遮挡物重复测试。
延伸阅读








最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
