




 广告
广告





















































狭窄环境下牵引车-挂车系统基于环境和行为的搜索轨迹规划方法

仿真在MATLAB 2022b中运行,并在具有Inter i7-12700H CPU和运行频率为2.30GHz的16GB RAM的计算机上执行。参数定义及取值如表1所示。障碍物在二维地图中可以抽象为如图3(a)所示的凸多边形和非凸多边形。某些类型的非凸障碍物对TTS规划任务提出了额外的挑战,因为它们的凹区域可能导致更多的搜索消耗,如图3(b)所示的死胡同。因此,我们对几种典型情况进行了测试,以验证HA-JPS的规划效率、轨迹可行性和完整性。
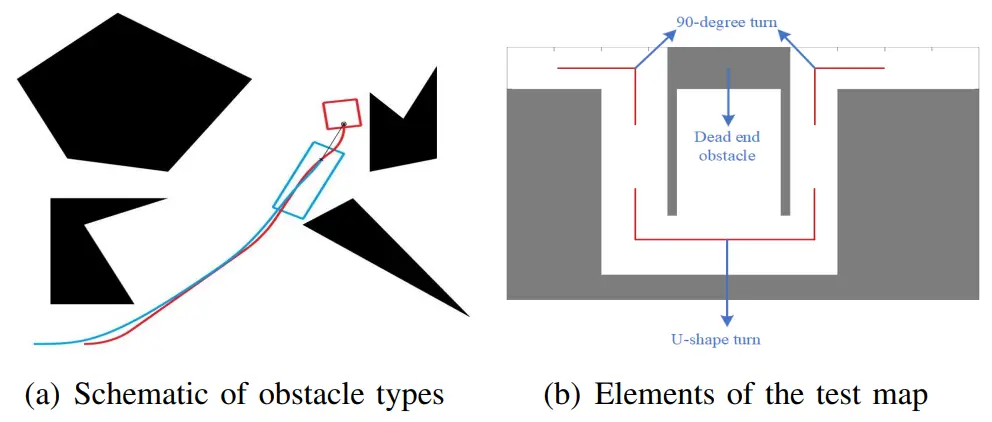
图3. 障碍物的分类和测试图的组成。
如图3(a)所示。某些类型的非凸障碍物对TTS规划任务提出了额外的挑战,因为它们的凹区域可能导致更多的搜索消耗,如图3(b)所示的死胡同。因此,我们对几种典型情况进行了测试,以验证HA-JPS的规划效率、轨迹可行性和完整性。
A.规划的效率表现
包含一辆拖车()的TTS在狭窄的走廊中进行了两次90度转弯和一次u型转弯的测试,如图4所示。当经过一个相对开放的环境(图4(a)和图4(b))时,两种算法搜索的路径相同,而我们的方法耗时更短(1.659405秒比2.200872秒)。当环境变得更窄时(图4(c)和图4(d)),我们的方法在更短的时间消耗方面的优势进一步被证明(1.839772秒比4.313189秒)。
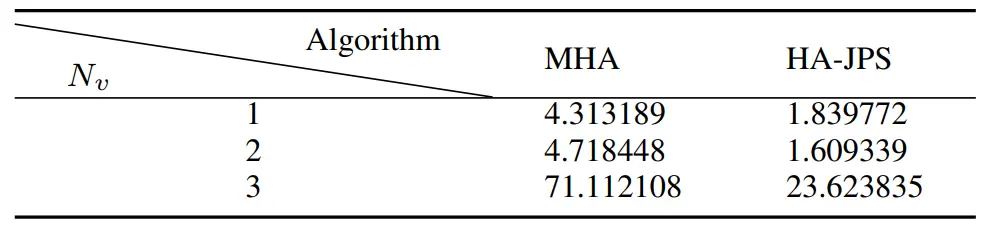
此外,在如图2所示的环境中,对包含不同数量拖车()的TTS进行了测试。在图4(c)和图4(d)中,MHA和HA-JPS的时间消耗比较见表2。在三种情况下,时间消耗分别减少了57%、65%和66%。
表2. 对比仿真结果。
B. 轨迹的可行性表现
主要从防止不必要的倒车和非凸避障两个方面考察了HA-JPS的轨迹可行性。倒车确实增加了找到最优路线的概率,但它可能不受用户的喜爱,甚至在携带大载荷时也不可行。因此,为TTS规划一个可行的轨迹,避免不必要的反转是合理的。另一个值得考虑的问题是环境中的非凸障碍物,这可能会将搜索误导到死胡同,并加剧时间消耗。本小节将通过对比实验演示HA-JPS轨迹的可行性,并展示以上两方面的改进。
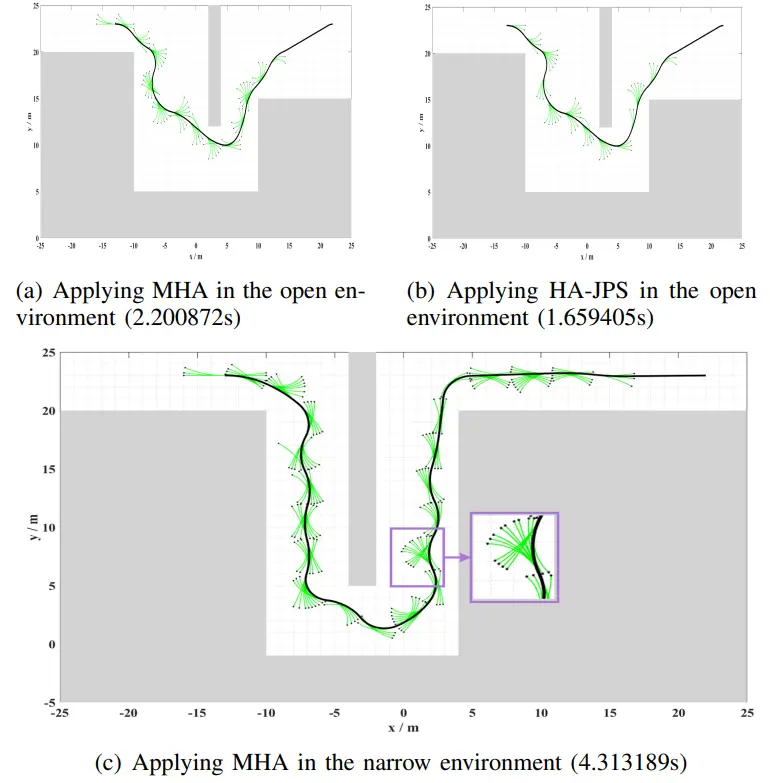
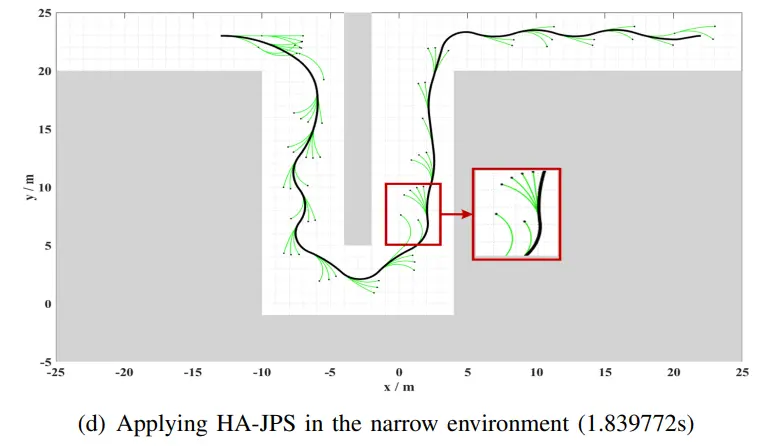
图4. MHA(左)和HAJPS(右)在相对开放(上)和相对狭窄(下)环境下的性能比较。
在倒车预防谱上,如图5所示,TTS ()在应用MHA时进行了3次倒车(图5(a)),这对于RBV规划是可以接受的,但对于TTS来说是极不可能的。相比之下,HA-JPS能够以更少的时间(23.623835秒比71.112108秒,图5(b))规划无倒车轨迹。在非凸避障谱上,如图6所示,MHA和HA-JPS都成功规划了一条轨迹(), HA-JPS通过扩展较少的节点减少了进入死角的搜索程度,从而减少了时间消耗(6.644171秒比15.090989秒)。
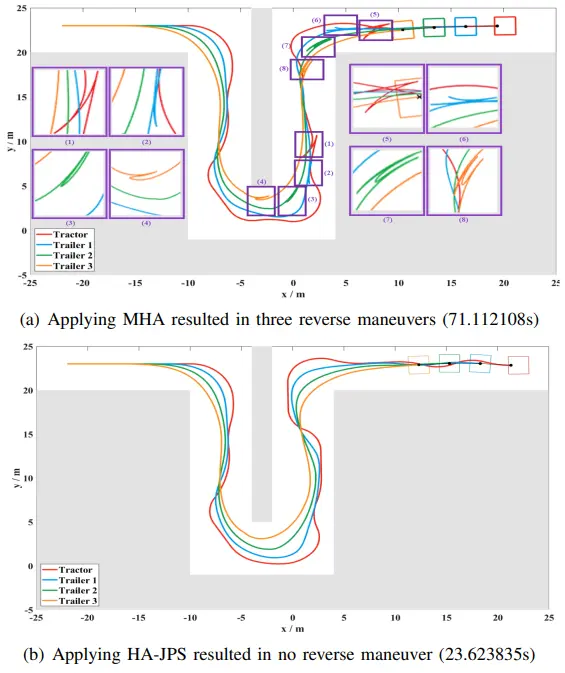
图5. MHA(左)与HA-JPS(右)预防倒车动作的比较



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
