




 广告
广告





















































狭窄环境下牵引车-挂车系统基于环境和行为的搜索轨迹规划方法
2024-09-12 07:58:43· 来源:同济智能汽车研究所

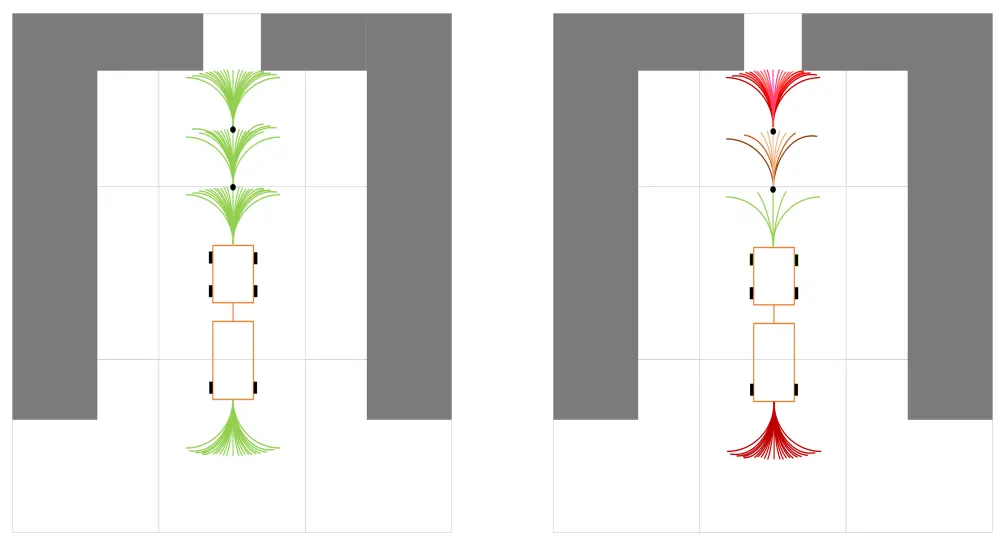
图6. MHA(左)与HA-JPS(右)非凸避障比较
C. 完备性表现
有人可能会担心,我们是否通过进一步牺牲算法的完整性来加快求解速度。然而,在模拟过程中发现了一个有趣的情况:当拖车长度从5 m扩大到5.4 m ()时,MHA倾向于反向搜索,无法规划轨迹,而我们的方法成功推导出可行的轨迹,如图7所示。
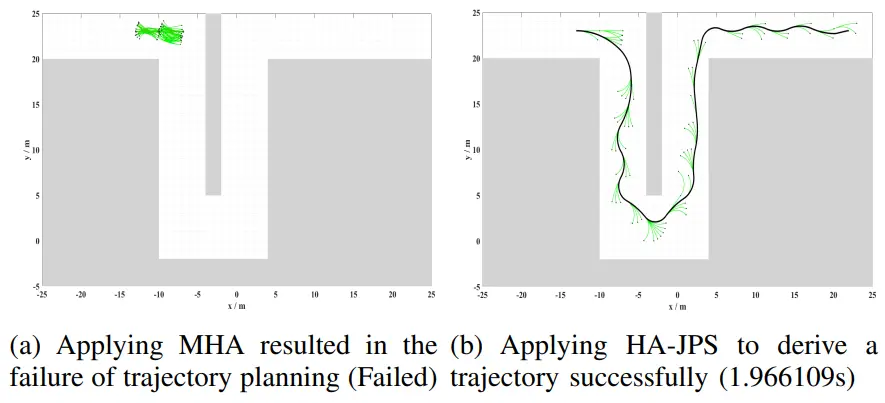
图7. MHA(左)和HA-JPS(右)算法完备性比较。
从理论上讲,我们的修改并没有涉及到算法完备性的提高。一种可能的解释是,MHA更注重寻找一个“最优”的解决方案,而不是一个“可行”的解决方案,导致在特定情况下更多的反向搜索,最终失败。假设混合A*是一个概率完备规划器,这种情况表明HA-JPS并没有进一步降低其完备性。
5 总结
本文提出了一种改进的基于搜索的TTS运动规划方法。该方法同时考虑了求解效率、轨迹可行性和完备性。深入考虑了TTS的工作环境和行为特点,并进行了一些修改,使其进一步适用于TTS的运动规划。为防止规划任务中不必要的倒车,设计了成本相对较高的倒车代价。并且优先扩展与当前TTS状态方向角度相同的方向。此外,为了提高开放环境下的搜索速度和保证狭窄环境下的搜索精度,采用了可变采样间隔。
虽然该方法在求解速度上有明显提高,但在一定程度上牺牲了轨迹质量。因此,未来的工作是将基于优化的规划器集成到当前的算法中,以弥补最优性和实时性能之间的差距。
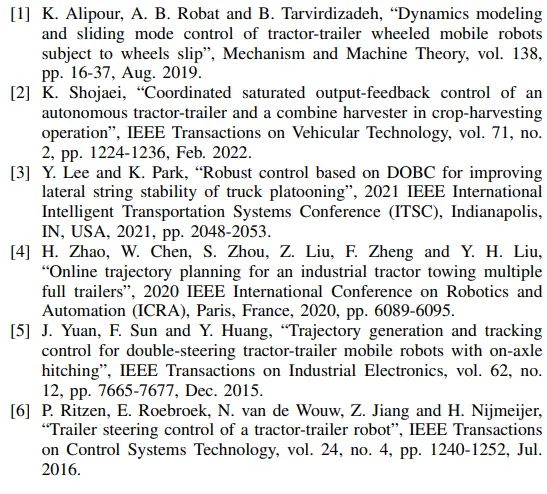
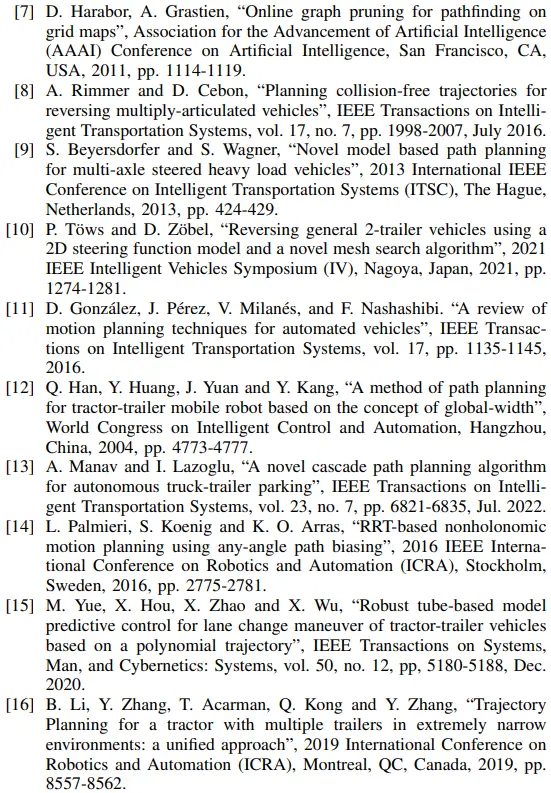
参考文献



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
